
7.1.2: Hypotheses
- Page ID
- 78148

Consider also the following hypotheses:
The Earth can be considered flat, non rotating, and approximate inertial reference frame.
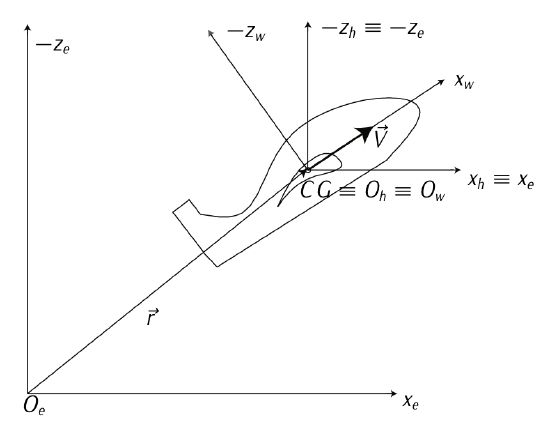
Figure 7.1: Wind axes reference frame.
The acceleration due to gravity in atmosphere flight of an aircraft can be considered constant (\(g = 9.81[m/s^2]\)) and perpendicular to the surface of Earth.
Wind is taken into account. Vertical component is neglected due its low influence. Only kinematic effects are considered, i.e., dynamic effects of wind are also neglected due its low influence.
The aircraft is considered as a rigid solid with six degrees of freedom, i.e., all dynamic effects associated to elastic deformations, to degrees of freedom of articulated subsystems (flaps, ailerons, etc.), or to the kinetic momentum of rotating subsystems (fans, compressors, etc ), are neglected.
The translational equations are uncoupled from the rotational equations by assuming that the airplane rotational rates are small and that control surface deflections do not affect forces. This leads to consider a 3 Degree Of Freedom (DOF) dynamic model that describes the point variable-mass motion of the aircraft.
We assume the aircraft is a conventional jet airplane with fixed engines.
The aircraft is modeled as variable mass particle.
The external actions acting on an aircraft can be decomposed, without loss of generality, into propulsive, aerodynamic, and gravitational.
We assume the aircraft has a plane of symmetry, and that the aircraft flies in symmetric flight, i.e., all forces act on the center of gravity and the thrust and the aerodynamic forces lay on the plane of symmetry.
We assume the thrust angle of attack is small.