
3.4: Level Sensors
- Page ID
- 22376

Introduction
Level sensors allow for the level control of fluid in a vessel. Examples of where these sensors are installed include reactors, distillation columns, evaporators, mixing tanks, etc. Level sensors provide operators with three important data for control: (1) the amount of materials available for processing, (2) the amount of products in storage, (3) the operating condition. Installing the correct level sensor ensures the safety of the operator and the surrounding environment by preventing materials in vessels from overflowing or running dry.
There are several different types of level monitors, including:
- Visual
- Float
- Valve Controlled
- Electronic
- Radiation
These different types of sensors can also be grouped into categories of process contact and non-process contact. As the name suggests, process contact sensors are within the tank, in physical contact with the material. Non-process contact sensors transmit various types of signals to reflect off of the material and thus measure the level. This sensor design can maintain its integrity within a potentially corrosive material and/or be positioned such that it can monitor the level changes from above the tank.
Visual Level Sensors
Visual level controls were the earliest developed level sensor. These types of monitoring devices can be something as simple as looking into an open container or inserting a marked object such as a dipstick. This type of sensor is the simplest and possibly the most reliable. These devices do not provide a way of connecting to a control device. They require human input with no way of automation; however, electronic issues will not be a possible problem.
Common Uses
Visual indicators can be found in many places and are not limited to chemical engineering applications. Examples of these are: dipsticks found monitoring the oil levels in a car and measuring cups with markings indicating different volumes. In chemical plants, visual indicators are used to measure changes in level as well as for high and low level alarms.
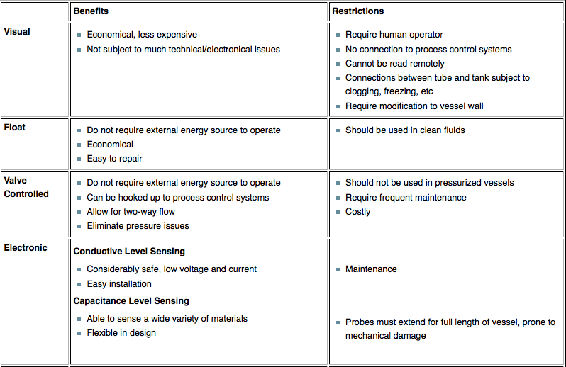
Benefits of Visual Level Sensors
Visual sensors are generally less expensive than other types of sensors. They are more reliable because of the simplicity of design.
Restrictions
Visual indicators do not always accurately measure how much volume is in the tank. They do not allow for any digital connections to process control systems. In the case of the sight tubes, they must be affixed directly to the tank and cannot be read remotely without a camera or other transmission tool. Tanks placed in hard-to-reach places would also cause problems contributing to inaccuracies in measurement, such as not reading markers on eye level or interpolating between marker intervals. Also, the connections between the tube and the tank are subject to residue buildup which could prevent the readings from being accurate. Weather is also a concern with sight tubes. External temperature changes could affect the fluid in the tube and thus measurement inaccuracy. For example, the fluid in the sensor could freeze, or the sensor could become clogged. This type of indicator requires modification to the vessel wall and would therefore be optimally installed at the time of initial construction. If considered at the time of the initial capital installation of the tank a sight tube will not add a large cost to the project. Yet, later modification to include this in the design and associated tank changes are potentially very costly. Despite these shortfalls, a sight tube is a reliable and appropriate choice in many common level reading applications.
Sight Tube Indicators
Sight tube indicators allow operators to monitor levels with precision while keeping the tank sealed. This type of monitoring device is comprised of a vertical tube equal in height to the actual vessel. This tube is connected in at least two places directly to the vessel so that its contents can flow into the monitoring tube. This ensures that the height of liquid in the tank will be equal to the height of liquid in the sight tube. Markings can be affixed to the indicator for both calibration and volume readings. There are many styles of this indicator. Some models have a float ball contained in the tube so that it will float on top of the liquid. Other models of the indicator have many paddles on fixed posts through the length of the tube. These paddles float horizontally when submerged and are vertical when not submerged. This results in a color change allowing for an easy identification of the tank volume.

A sight tube. More pictures of this type of gauge can be found on Seetru Limited's website.
Float Type Level Sensors
Float Types of level sensors are based on the principle of buoyancy which is the upward force produced on a submerged object by the displaced fluid. This force is equal to the weight of the displaced fluid. Float sensors take their measurements at the interfaces of materials, where the movement of the float and/or the force on the float are caused by the differing densities of the float and the fluid. There are two broad categories of Float Type level sensors: Buoyancy and Static.
Buoyancy Types
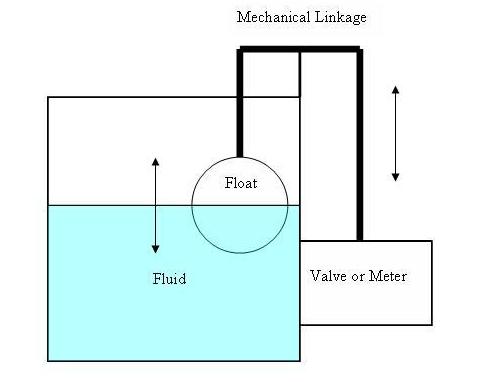
Buoyancy level sensors are less dense than the fluid and thus change position along with the fluid level. The movement of the float transmits the level information through some mechanical linkage to an output such as a valve or operator observation. There are basic three types of mechanical linkage - chain / tape sensors, lever / shaft mechanisms and magnetically coupled devices.
- Chain / Tape sensors – The linkage is by a flexible chain or tape.
- Lever / Shaft mechanisms – The linkage is a rigid shaft.
- Magnetically coupled devices – These devices are similar to the Chain/Tape sensors, except a magnet is attached to the float and another is acted upon by the floating magnet moving a tape like the chain/tape type devices. The moving magnet can be sequestered from the float attached magnet for use in corrosive media.
Schematic of a float type level sensor is shown below. As the fluid level rises or falls, buoyant force is transferred through mechanical linkages to your output device.
Static Types
Static level sensors are denser than the media being measured and thus do not move. As the level changes, the buoyant force acting on the "float", which is actually a weight, changes. The change in weight is measured by a scale. The level of the tank is calculated by measurements of the weight change in the float, not its actual change in position.
Formulas
Changes in the volumetric rate of material flow, resulting from changes in such things as the pressure of your pump will affect the operation of a float type level sensor. The same movement of the float will have the same effect on the valve, but as valve is moderating a different flow it has a different proportional sensitivity \(K_c\).
\[K_{c}=\frac{q}{k} \nonumber \]
where q is the flow rate and k is the height the float moves to completely traverse the valves operating range.
This is important because the given change in fluid height used to previously design the system will still change the valve’s position in the same manner, but won’t affect the same change in flow rate. If your pressure has dropped, your valve will have to be opened wider to match the same flow rate. The amount wider that it has to be opened is called an offset. Manipulating the valve response to the float movement, also known as the gain:
\[\text{Gain}=\frac{\left(\text {valve}_{\text {response}}\right)}{\text {float}_{\text {movement}}} \nonumber \]
can be used to alleviate this problem, but it won’t work exactly the same way it did before the change in load.
Operation power is the amount of power the float has available to perform actions to control the system. Changes in the specific gravity of the fluid (or the float) will affect buoyancy of the float and thus will affect the amount of force exert on your system. A temperature is a very common parameter that can change your fluid’s specific gravity. Warmer fluids tend to be less dense, and so your float will generate less buoyant force for a given change in fluid level.
Zero buoyancy force level is the level at which the weight of the float is exactly as buoyant as the fluid it replaces. It can be approximated by the following formula:
\[\text {Zero Buoyant Force Level}=D \frac{\left(S G_{\text {float}}\right)}{S G_{\text {fluid}}} \nonumber \]
where D is the diameter of the float and SG is the specific gravity.
Common Uses
Float Type Level Sensors regulate how much water is in the reservoir of a flush toilet; the float is attached to a lever which has a rotating axis that stops when the flow of water reaches a certain level.
- Chain / Tape sensors - regulating the level on storage tanks at atmospheric pressures.
- Lever / Shaft Mechanisms - regulating the level on vessels under pressure.
Benefits
Float Type level sensors do not require external energy sources to operate. Since they are simple robust machines it is easy to repair. The cost of these units makes them on the economical side, ranging from approximately $20 (homedepot.com) for the apparatus in a standard toilet to a few hundred dollars for a 3/4" cast iron valve with float (Liptak 2005). Prices would increase with higher quality materials and valve size. Floats could be made out of plastics or metals (steel, stainless steel, etc.). Material selection will depend on the application; more chemically resistant materials would be used for corrosive mediums.
Restrictions
Float type level sensors should only be used in clean fluids. Fluids that are a suspension of solids or slurries could foul the operation of the machine. Anything that could increase friction on the mechanical linkages could increase the dead band, which is the delay the sensor experiences due to the excess of force required to overcome the static friction of a non-moving system. An excess of force is required to be built up, so a float type level sensor will not respond immediately to changes in level.
Valve-based Level Sensors
Valve-based level sensors not only measure the fluid level, but also cause the fluid level to change accordingly. Two basic types of valves that will be discussed are altitude valves and diverter valves.
Altitude Valves
A simple altitude valve uses a spring that opens and closes different ports and lines when pressure changes due to the changing fluid levels. When fluid levels exceed the setting of the spring, a diaphragm connected to the spring lowers, closes the drain port, and opens the main line pressure. This turns off the main valve and stops fluid from flowing into the tank. When fluid levels decrease, the diaphragm raises, opens the drain port, and closes the main line pressure. This turns on the main valve and more fluid is supplied to the tank.
An example of an altitude valve is shown in the bottom left corner of the following website: http://www.gaindustries.com/html/01a_SAVV.htm
Common Uses
Altitude valves are on/off controls and can be found in supply lines connected to basins, tanks, and reservoirs. The main job of these valves is to prevent overflow of the fluid and to hold fluid level constant.
Benefits
There is no external power source needed when operating altitude valves because they are controlled by the pressure of the process fluid. More complicated altitude valves can also be used for other purposes other than an on/off control. These features include the following:
- Open the valve when pressure drops to a predetermined point
- Delayed opening so the valve only opens when fluid level drops a certain amount below the set point
- Close the valve slowly to eliminate pressure build-up
- Two-way flow to allow fluid to return when the level has dropped below the set point
- Open the valve while maintaining constant inlet pressure and plant distribution pressure
- Reduce pressure for outlet streams. This may be needed when working with equipment that has high supply pressures, such as aerator basins. Aerator basins are typically used in wastewater treatment because they have the capability of holding large amounts of water.
- Check valves can be installed to allow the valve to close if the pressure reaches a predetermined low point (which could be the cause of equipment failure elsewhere in the plant)
Restrictions
Altitude valves should not be used in pressurized vessels. These valves are constructed from a limited number of materials, such as cast iron. This restricts the number of fluids that can be used with the valves. Therefore, altitude valves are usually used for water service. Since these valves are usually used to operate a large amount of fluid, they are subsequently large with multiple functions that make them very expensive. A 30 inch altitude valve can cost over $50,000. In addition, frequent maintenance is required because of the many components and moving parts. These valves are operated at ambient temperatures and should be checked for freezing of stationary sensing lines.
Diverter Valves
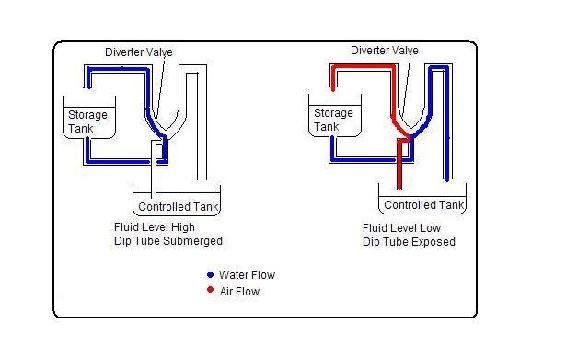
Diverter valves are connected to a dip tube that is submerged in a controlled tank. When the fluid level of the tank drops, the dip tube is exposed to atmospheric pressure. Once air enters the dip tube, it utilizes the Coanda effect. Coanda effects occur when a curved surface exists. Gases tend to follow the nearest curved surface while pushing other fluids in a different direction. In the case of the diverter valve, air from the dip tube follows the curved surface of the control port back to the storage tank and pushes fluid flowing out of the storage tank to the other wall of the valve. This fluid then flows into the controlled tank to adjust the level.
Common Uses
Diverter valves control fluid level by acting as an on/off switch. They can also be modified to be used for throttling. Diverter valves are used as low level indicators so they should only been used when low levels of a tank are a concern.
Benefits
Diverter valves need no external power source for operation. They have no moving parts, plugs, or packing, so they require minimal maintenance. Diverter valves can be operated at any temperature and are not affected by vibration. They can be constructed from many materials such as metals, plastics, and ceramics. Therefore, there is limited restriction to the type of liquid used with the valves. However, when using fluidized solids and slurries, the dip tube must remain open, so build-up does not occur. Any build-up near or in the tube should be removed.
Restrictions
Diverter valves should not be used when operating under conditions other than atmospheric pressure. They are also not for use when dealing with hard to handle processes. Outlet pressure cannot be greater than atmospheric pressure or back pressure will occur and the valve will not operate correctly.
Electrical Level Sensors
Conductive Level Sensing
Conductive level sensors work by applying a low-voltage across two electrodes at different levels in a vessel. When both electrodes are immersed in a conductive liquid, a current flows. This type of electrical conductivity setup is best applicable for point level detection (level detection at a specific point in the material.) They are typically made of titanium, Hastelloy B, or stainless steel.

Example of a conductive level sensor.
Common Uses
Conductive level sensors are commonly used to measure both conductive and corrosive liquids. A common conductive liquid is water, whereas some common corrosive liquids are nitric acid, ferric chloride, and hydrochloric acid.
Benefits
This method is considered extremely safe due to the low voltages and currents used. Conductive level sensors are also known for their easy installation and use.
Restrictions
The greatest concern with conductive sensors is maintenance. The probe needs to be monitored for buildup on the sensor. Residues from wet or sticky fluids that cause build up can be prevented by coating the sensors with Teflon or polyethylene-based materials.
Capacitance Level Sensing
A capacitor is made up of two conductors (electrodes/plates) that are electrically separated by a nonconductor (dielectric). In the case of level sensing, one of the electrodes is typically a vertically positioned rod while the other is the metallic vessel wall. The dielectric between them is the material being measured in the vessel. The principle of capacitance level sensing is based on the formula below:
Capacitance = Dielectric constant x (Area of the plates ÷ Distance between plates)
If the dielectric is a liquid, the capacitance probe can measure the combined capacitance of both the liquid and gas. When the liquid level rises or falls, the total capacitance value will change. Since the dielectric constant and distance between the plates are constant (the rod and the vessel are stable), the only value changing the capacitance is the area of the plates immersed in the liquid. Total capacitance changes approximately proportionally to the liquid rise or fall in the column. Consequently, the liquid level can be calculated by the change in capacitance.
Common Uses
The list below shows just a few applications of capacitance level sensors found in industry and the materials they sense.
- Chemical/Petrochemical - Oil, clay, soda ash
- Food - Flour, Powered Milk, Sugar
- Charcoal - Wood, Charred sawdust
- Pharmaceuticals - Various powders and liquids
- Mining - Various minerals, metals, stone,
Benefits
Capacitance level sensing is useful in its ability to sense a wide variety of materials such as solids, organic and aqueous solutions, and slurries. For example, materials with dielectric constants as low as 2.1 (petroleum oil) and as high as 88 (water) or more can be detected with capacitance level sensing. The equipment, typically made of stainless steel, is simple to use, clean and can be specifically designed for certain applications. For example, they can be made to withstand high temperatures and pressures or have built-in splashguards or stilling wells for environments prone to turbulence.
Restrictions
There are limitations to using capacitance level sensors. One major limitation for capacitance probes is found when using tall bins that store bulk solids. Probes are required to extend for the length of the vessel, so in a lengthy vessel the long cable probes can be subject to mechanical tensions and breakage. Another limitation is from build up and discharge of a high-voltage static charge that can result from the rubbing and movement of low dielectric materials, but this danger can be eliminated with proper design and grounding. Also, abrasion, corrosion, and build up of material on the probe can cause variations in the dielectric constant of the material being measured. To reduce this issue, capacitance probes can be coated with Teflon, Kynar, polyethylene or other materials.
Radiation-based Level Sensors
Radiation-based level sensors are based on the principle of a material’s ability to absorb or reflect radiation. The common types of radiation used in continuous level gages are ultrasonic, radar / microwave and nuclear.
Ultrasonic (Sonic) Level Sensors
Ultrasonic level sensor transmitters emit high frequency ultrasonic acoustic waves which are reflected back by the medium to the receivers. By measuring the time it takes for the reflected echo to be received, the sensor can calculate the actual distance between the receiver and the fluid level. These sensors can be accurate from a distance of 5mm to 30m.
Common Uses
Ultrasonic level sensors are commonly used for point level detection. They are best used for viscous liquids, slurries and bulk solids.
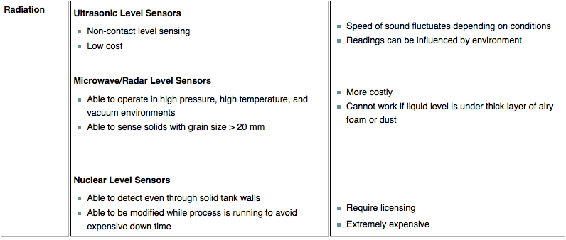
Benefits
The combination of ultrasonic level sensors’ high functionality for relatively low prices makes them a popular choice for non-contacting level sensing.
Restrictions
Since the speed of sound in air can fluctuate in different conditions, ultrasonic sensors are not suitable for use in all applications. Environments that have varying moisture and temperatures will influence the sensors readings. Turbulence, steam, and foam prevent waves from reflecting properly and distort readings. In addition, the level sensor must be mounted properly so that it correctly senses the distance between the transmitter and the fluid level.
Microwave / Radar Level Sensors
Microwave / radar level sensors are similar to ultrasonic level sensors in that they require a transmitter and receiver. In addition to these materials, radar sensors also need an antenna and operator interface to use electromagnetic waves to calculate level distance.
Common Uses
These sensors are frequently used for non-contacting situations that require level sensing in varying temperature and pressure environments.
Benefits
Microwave / radar sensors have an advantage over ultrasonic sensors in that they are able to operate in high pressure and high temperature environments. They can also sense solids with grain sizes larger than 20mm.
Restrictions
When fluid level is under a thick layer of foam or dust, these sensors may not detect the fluid level, but instead detect the level of the dust or foam. Microwave / radar level sensors are also more costly than ultrasonic level sensors.
Nuclear Level Sensors
Nuclear level sensors rely on gamma rays for detection. Although these gamma rays can penetrate even the most solid of mediums, the intensity of the rays will reduce in passage. If the gamma ray emitter and the detector are placed on the top and bottom of a vessel, the thickness of the medium (level) can be calculated by the change in intensity.
Common Uses
These sensors are usually used when the material being measured presents a risk to human life or the environment. These include, for example, materials that are toxic, carcinogenic, or explosive.
Benefits
Nuclear radiation has the ability to detect level even through solid tank walls. Since they appear to “see” through walls, the nuclear gage may be modified and/or installed while the process is running and avoid expensive down time.
Restrictions
Nuclear level sensors are typically the last resort when choosing a level sensor. They not only require a Nuclear Regulatory Commission (NRC) license to install, but are extremely expensive in comparison to other level sensors.
Summary of Benefits and Restrictions
Imagine that you are responsible for maintaining a certain amount of chemical in a storage vessel for use later on downstream in your process. Your chemical has a specific gravity of 1.2. Assume that it is effectively independent of temperature. At maximum flow rate, a valve is feeding 80 gallons per minute into a storage vessel. 2 inches of valve travel is required to completely shut off the flow through the valve. The spherical float you are given to work with is 8 inches across, chemically compatible with your chemical, and its specific gravity can be altered. Your process dictates that you have to maintain about 400 gallons in this tank for use downstream, and that corresponds to a height of twenty inches from the bottom of the tank. At this height, the ball is 4 inches submerged. The ball has to travel 5 inches to completely close your valve. Calculate:
- the specific gravity the float should be
- the gain of the regulator
- the proportional sensitivity of your system
- assume the specific gravity of your chemical increases dramatically. Explain qualitatively what that should do to the gain, zero buoyant force level and dead band of the sensor
- was a float type valve appropriate to be used in this problem?
Solutions
Using the formula for Zero Buoyant Force level  and plugging in values from the problem statement, we come up with the following
and plugging in values from the problem statement, we come up with the following  We used 4 inches, and not 20 inches because the zero buoyant force level indicates the level the float is submerged, not the level of the fluid. Isolating the value for SGfwe arrive at a specific gravity of 0.6 for the float.
We used 4 inches, and not 20 inches because the zero buoyant force level indicates the level the float is submerged, not the level of the fluid. Isolating the value for SGfwe arrive at a specific gravity of 0.6 for the float.
b) Using the formula for the gain of the regulator  and values from the problem statement, we come up with the following
and values from the problem statement, we come up with the following  proceeding with the calculation we arrive at a value of 0.4 for the gain.
proceeding with the calculation we arrive at a value of 0.4 for the gain.
c) Using the formula for the proportional sensitivity of the system  and values from the problem statement, we come up with the following
and values from the problem statement, we come up with the following  proceeding with the calculation we arrive at a value of
proceeding with the calculation we arrive at a value of 
d) Float type level sensors work on the principal of buoyancy. If the density of the liquid being displaced increases, the buoyant force on the float increases for the same change in liquid height. The gain of the sensor refers to the amount of travel in the valve versus the amount of travel in the float, so for a given change in fluid height, the valve will still change the same amount as it did. However, since the buoyant force is increased due to the increased process fluid density, the dead band should decrease because the force of an incremental increase in height should enable the sensor to overcome friction more easily.
e) A float type valve was appropriate to be used in this problem, because the requirements were that "about 400 gallons" be maintained and the fluid was chemically compatible with the float. Due to unavoidable dead band, or the time it takes the float to respond to a given change in fluid, it won't maintain exactly 400 gallons, but it will stay close to that.
Please answer the questions for the four hypothetical scenarios regarding selection of an appropriate level sensor. Give reasons for your selections.
- A commonly used tank contains Dichloromethane which requires constant monitoring to ensure that no leaks exist. The precise volume will be regulated to monitor any decrease in level when a known transfer is not taking place. This tank will be filled to ~5,000 gallons and not be refilled until the level is less than 1,000 gallons of dichloromethane. What type of sensor should you install?
- Under what circumstances would you select a radiation sensor?
- Toilets have a Float Level Sensor to indicate when a flush has occurred and the bowl needs to be refilled. Which type of Float Sensor does the toilet have?
- When would be a good time to use a visual sensor?
Solutions
- The most appropriate selection of level sensor for this application is the capacitance sensor or the ultrasonic sensor. These are both electrical sensors that allow for measurements of changes in height, whereas other types offer a binary result: either the level is above or below a set point. The capacitance and ultrasonic sensors differ only by the way they are installed. Capacitance sensors require contact with the liquid while ultrasonic sensors do not. In this specific case for dichloromethane, which is non-corrosive, it is not necessary to monitor the volume without contacting the liquid, and therefore the capacitance sensor is also an acceptable selection.
- A radiation-based level sensor is most appropriate when sensors cannot be brought into direct contact with the measured substance. This is only a possible option and often an expensive one.
- Toilets have a lever/shaft mechanism. This float is less dense than the water which fills the tank. It will drop quickly when the toilet is flushed and will slowly rise as the tank fills with water. When the tank is full the float will rotate the shaft upwards enough to close off the flow of water.
- Visual sensors should only be used when an electrical sensor is not required or as a backup. This is because they cannot be monitored automatically as visual sensors do not provide a digital response. It is also a good idea to provide a secondary way of obtaining level information when installing a new tank, and manual checks are often a good idea.
References
- [Image Available] Seetru, www.seetru.com/index_main.html, 12 Sept 2006.
- Liptak, Bela G., Instrument Engineers Handbook, 4th Edition, Volume 2. Taylor & Francis CRC Press, 2005.
- Perry, Robert H., Perry's Chemical Engineers' Handbook, 7th Edition. McGraw-Hill, 1997.
- Richardson, J.F. and Peacock, D.G., Chemical Engineering, 3rd Edition, Volume 3. Butterworth-Heinemann, 1994.
- Transactions in Measurement & Control: Volume 4, 2006. Omega Engineering, Inc. Retrieved September 10, 2006, from http://www.omega.com/literature/transactions/volume4/
- Wikipedia. Retrieved September 9, 2007, from en.Wikipedia.org/wiki/Level_sensor
- Considine, Douglas M., Process/Industrial Instruments & Controls Handbook, 4th Edition, McGRAW-HILL, INC., 1993.
Contributors and Attributions
- Authors: (September 14, 2006) Andrew MacMillan, David Preston, Jessica Wolfe, Sandy Yu
- Stewards: (September 10, 2007) Yoo Na Choi, Yuan Ma, Larry Mo, Julie Wesely