
2.11: Summary
- Page ID
- 33353
Figure 2-57 gives a summary of the Mohr circles for Active and Passive failure of a cohesion less soil.
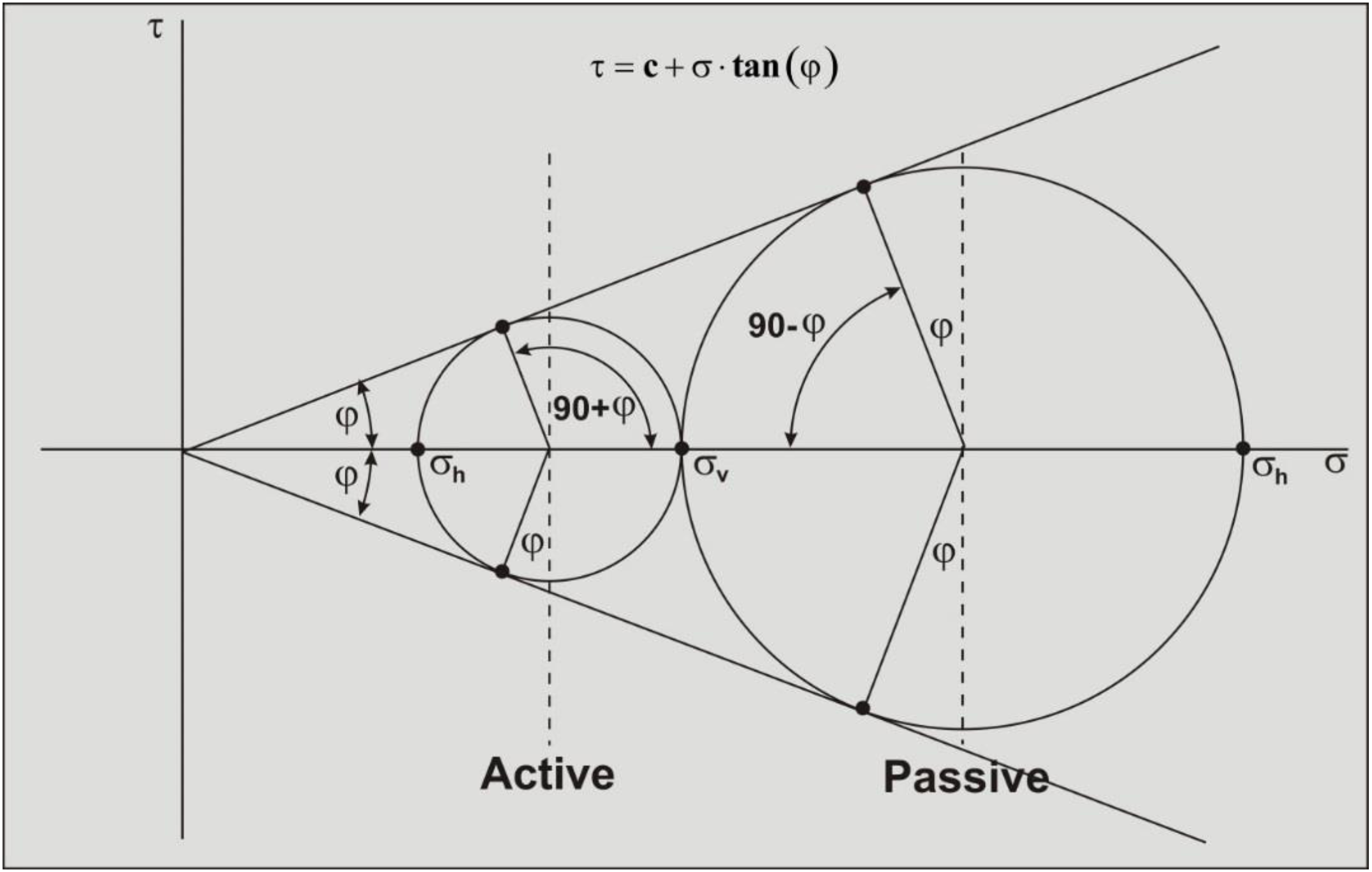
Some equations for a cohesion less soil in the active state:
Failure will occur if:
\[\ \sin (\varphi)=\frac{\frac{1}{2} \cdot\left(\sigma_{\mathrm{v}}-\sigma_{\mathrm{h}}\right)}{\frac{1}{2} \cdot\left(\sigma_{\mathrm{v}}+\sigma_{\mathrm{h}}\right)}\tag{2-114}\]
This can also be written as:
\[\ \left(\frac{\sigma_{\mathrm{v}}-\sigma_{\mathrm{h}}}{2}\right)-\left(\frac{\sigma_{\mathrm{v}}+\sigma_{\mathrm{h}}}{2}\right) \cdot \sin (\varphi)=0\tag{2-115}\]
Using this equation the value of σh can be expressed into σv:
\[\ \sigma_{\mathrm{h}}=\sigma_{\mathrm{v}} \frac{1-\sin (\varphi)}{1+\sin (\varphi)}=\mathrm{K}_{\mathrm{a}} \cdot \sigma_{\mathrm{v}}\tag{2-116}\]
On the other hand, the value of σv can also be expressed into σh:
\[\ \sigma_{\mathrm{v}}=\sigma_{\mathrm{h}} \frac{1+\sin (\varphi)}{1-\sin (\varphi)}=\mathrm{K}_{\mathrm{p}} \cdot \sigma_{\mathrm{h}}\tag{2-117}\]
For the passive state the stresses σv and σh should be reversed.
Figure 2-58 gives a summary of the Mohr circles for Active and Passive failure for a soil with cohesion.
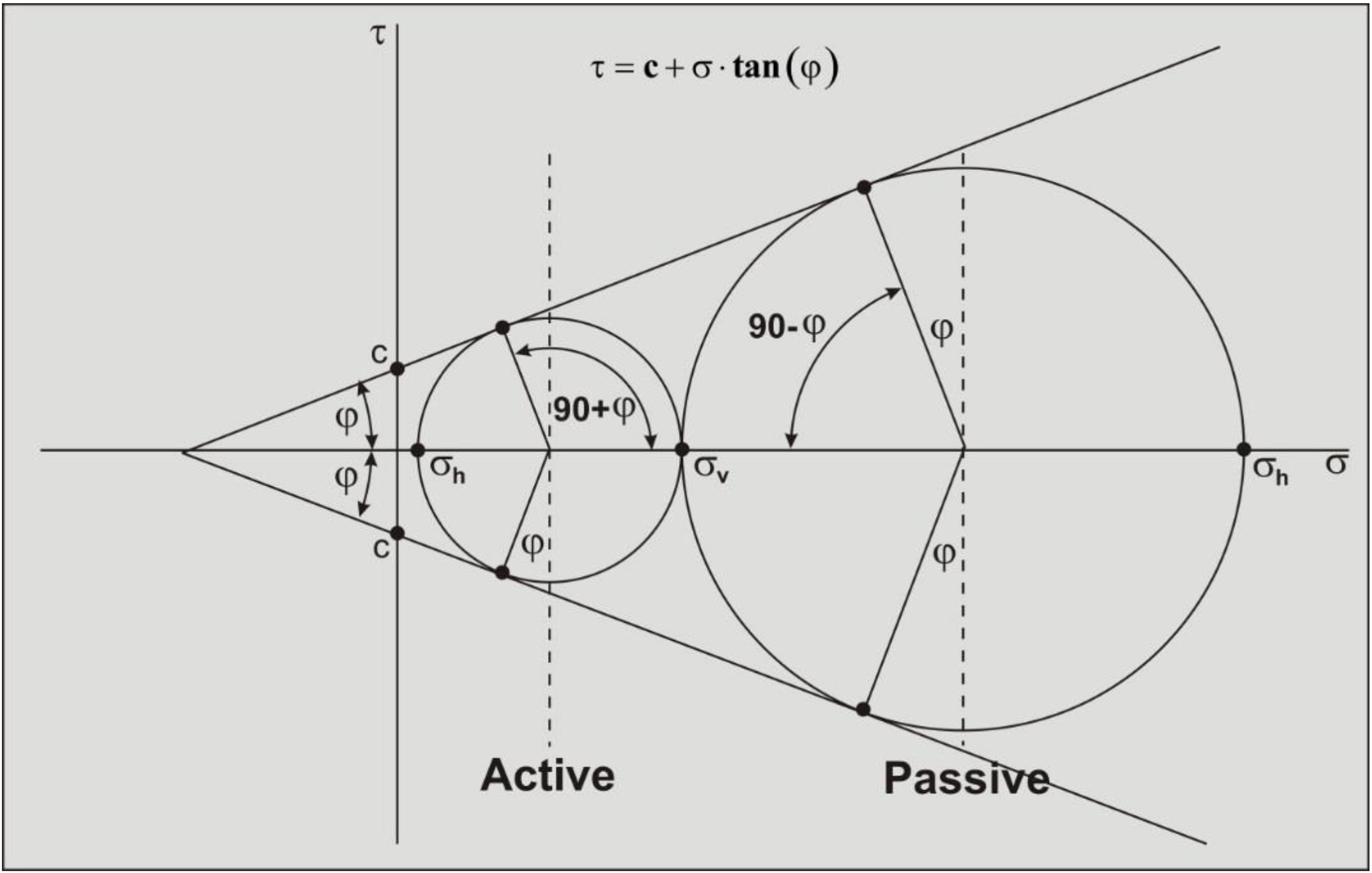
Some equations for a soil with cohesion in the active state:
Failure will occur if:
\[\ \sin (\varphi)=\frac{\frac{1}{2} \cdot\left(\sigma_{\mathrm{v}}-\sigma_{\mathrm{h}}\right)}{\mathrm{c} \cdot \cot (\varphi)+\frac{1}{2} \cdot\left(\sigma_{\mathrm{v}}+\sigma_{\mathrm{h}}\right)}\tag{2-118}\]
This can also be written as:
\[\ \left(\frac{\sigma_{\mathrm{v}}-\sigma_{\mathrm{h}}}{2}\right)-\left(\frac{\sigma_{\mathrm{v}}+\sigma_{\mathrm{h}}}{2}\right) \cdot \sin (\varphi)-\mathrm{c} \cdot \cos (\varphi)=0\tag{2-119}\]
Using this equation the value of σh can be expressed into σv:
\[\ \sigma_{\mathrm{h}}=\sigma_{\mathrm{v}} \frac{1-\sin (\varphi)}{1+\sin (\varphi)}-2 \cdot \mathrm{c} \cdot \frac{\cos (\varphi)}{1+\sin (\varphi)}=\mathrm{K}_{\mathrm{a}} \cdot \sigma_{\mathrm{v}}-2 \cdot \mathrm{c} \cdot \sqrt{\mathrm{K}_{\mathrm{a}}}\tag{2-120}\]
On the other hand, the value of σv can also be expressed into σh:
\[\ \sigma_{\mathrm{v}}=\sigma_{\mathrm{h}} \frac{1+\sin (\varphi)}{1-\sin (\varphi)}+2 \cdot \mathrm{c} \cdot \frac{\cos (\varphi)}{1-\sin (\varphi)}=\mathrm{K}_{\mathrm{p}} \cdot \sigma_{\mathrm{h}}+2 \cdot \mathrm{c} \cdot \sqrt{\mathrm{K}_{\mathrm{p}}}\tag{2-121}\]
For the passive state the stresses σv and σh should be reversed.