
3.5: Lissajous Figures
- Page ID
- 9965

Lissajous figures are figures that are turned out on the face of an oscilloscope when sinusoidal signals with different amplitudes and different phases are applied to the time base (real axis) and deflection plate (imaginary axis) of the scope. The electron beam that strikes the phosphorous face then had position
\[z(t)=A_x\cos(ωt+φ_x)+jA_y\cos(ωt+φ_y) \nonumber \]
In this representation, \(A_x\cos(ωt+φ_x)\) is the “x-coordinate of the point,” and \(A_y\cos(ωt+φ_y)\) is the “y-coordinate of the point.” As time runs from 0 to infinity, the point \(z(t)\) turns out a trajectory like that of the Figure. The figure keeps overwriting itself because \(z(t)\) repeats itself every \(\frac {2π} ω\) seconds. Do you see why?
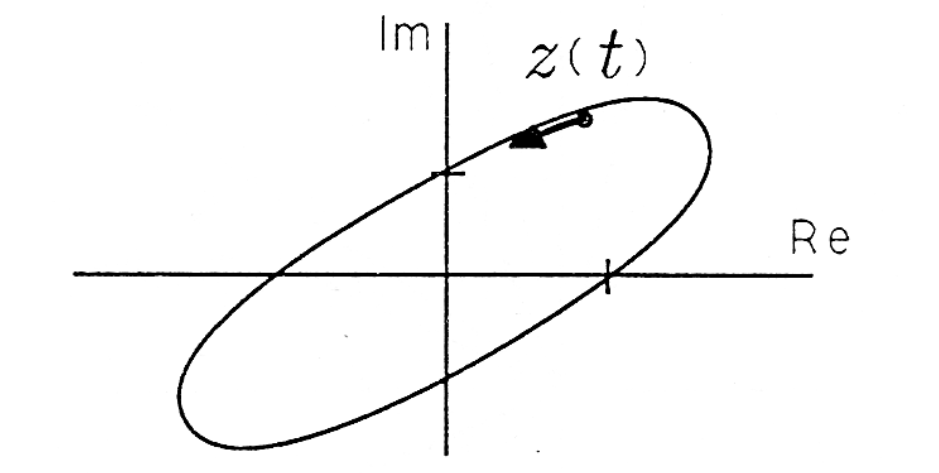
Find the intercepts that the Lissajous figure makes with the real and imaginary axes in the Figure. At what values of time are these intercepts made?
Show that the Lissajous figure \(z(t)=A_x\cos(ωt+φ_x)+jA_y\cos(ωt+φ_y)\) is just the rotating phasor \(Ae^{j(ωt+φ)}\) when \(A_x=A_y=A\), \(φ_x=φ\), and \(φ_y=φ+\frac π 2\).
Two-Phasor Representation
We gain insight into the shape of the Lissajous figure if we use Euler's formulas to write \(z(t)\) as follows:
\[ \begin{align*} z(t) &=\frac {A_x} {2} \left[e^{j(ωt+φ_x)} + e^{−j(ωt+φ_x)}\right] + j\frac {A_y} {2} \left[e^{j(ωt+φ_y)} + e^{−j(ωt+φ_y)}\right] \\[4pt] &= \left[\frac {A_x e^{jφ_x} + jA_ye^{jφ_y}}{2}\right] e^{jωt} + \left[\dfrac{A_x e^{−jφ_x} + jA_y e^{−jφ_y}}{2}\right]e^{−jωt} \end{align*} \nonumber \]
This representation is illustrated in Figure. It consists of two rotating phasors, with respective phasors B1 and B2
\[z(t)=B_1e^{jωt}+B_2e^{−jωt} \nonumber \]
\[B_1=\frac {A_xe^{jφx}+jA_ye^{jφy}} 2 \nonumber \]
\[B_2=\frac {A_xe^{−jφx}+jA_ye^{−jφy}} 2 \nonumber \]
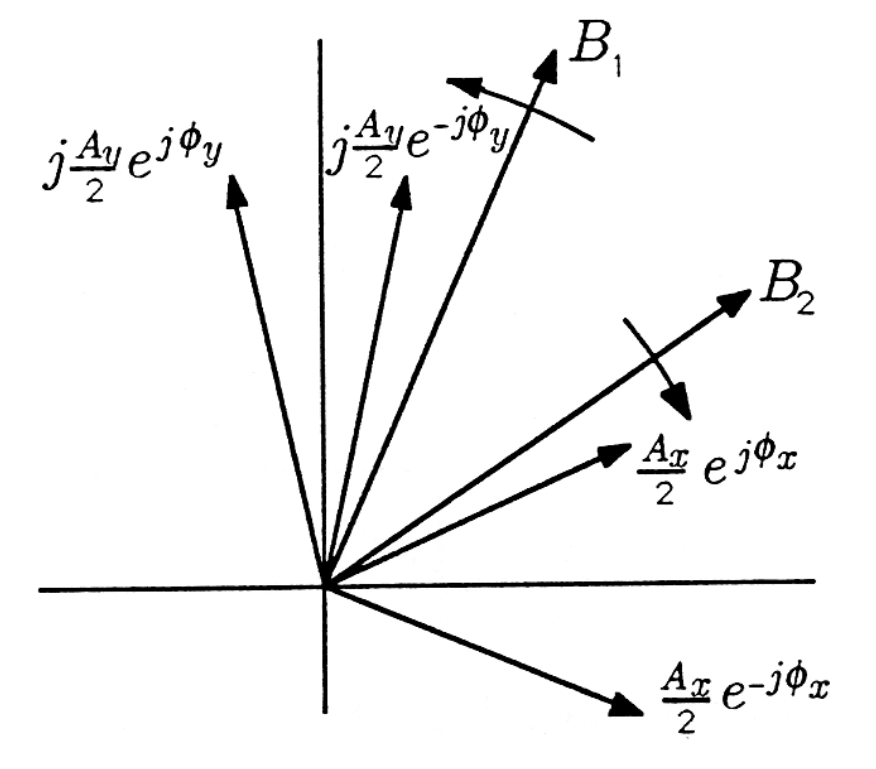
As \(t\) increases, the phasors rotate past each other where they constructively add to produce large excursions of \(z(t)\) from the origin, and then they rotate to antipodal positions where they destructively add to produce near approaches of \(z(t)\) to the origin.
In electromagnetics and optics, the representations of \(z(t)\) given in Equation and Equation are called, respectively, linear and circular representations of elliptical polarization. In the linear representation, the x- and y-components of \(z\) vary along the horizontal and vertical lines. In the circular representation, two phasors rotate in opposite directions to turn out circular trajectories whose sum produces the same effect.
(MATLAB) Write a MATLAB program to compute and plot the Lissajous figure \(z(t)\) when \(A_x=1/2\),\(A_y=1\),\(φ_x=0\), and \(φ_y=π/6\). Discretize \(t\) appropriately and choose an appropriate range of values for \(t\).