
4.6: BIBO Stability of Discrete Time Systems
- Page ID
- 22863

Introduction
BIBO stability stands for bounded input, bounded output stability. BIBO stability is the system property that any bounded input yields a bounded output. This is to say that as long as we input a signal with absolute value less than some constant, we are guaranteed to have an output with absolute value less than some other constant.
Discrete Time BIBO Stability
In order to understand this concept, we must first look more closely into exactly what we mean by bounded. A bounded signal is any signal such that there exists a value such that the absolute value of the signal is never greater than some value. Since this value is arbitrary, what we mean is that at no point can the signal tend to infinity, including the end behavior.
Time Domain Conditions
Now that we have identified what it means for a signal to be bounded, we must turn our attention to the condition a system must possess in order to guarantee that if any bounded signal is passed through the system, a bounded signal will arise on the output. It turns out that a continuous-time LTI (Section 2.1) system with impulse response \(h[n]\) is BIBO stable if and only if it is absolutely summable. That is
Discrete-Time Condition for BIBO Stability
\[\sum_{n=-\infty}^{\infty}|h[n]|<\infty \nonumber \]
Z-Domain Conditions
Stability for discrete-time signals (Section 1.1) in the z-domain is about as easy to demonstrate as it is for continuous-time signals in the Laplace domain. However, instead of the region of convergence needing to contain the \(j \omega\)-axis, the ROC must contain the unit circle. Consequently, for stable causal systems, all poles must be within the unit circle.
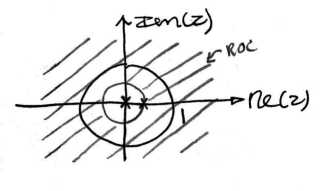 (a)
(a)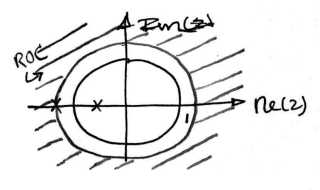 (b)
(b)
BIBO Stability Summary
Bounded input bounded output stability, also known as BIBO stability, is an important and generally desirable system characteristic. A system is BIBO stable if every bounded input signal results in a bounded output signal, where boundedness is the property that the absolute value of a signal does not exceed some finite constant. In terms of time domain features, a discrete time system is BIBO stable if and only if its impulse response is absolutely summable. Equivalently, in terms of z-domain features, a continuous time system is BIBO stable if and only if the region of convergence of the transfer function includes the unit circle.