
19.5: Exercises
- Page ID
- 24344

Exercise 19.1
Suppose \(P(s)=\frac{a}{s}\) is connected with a controller \(K(s)\) in a unity feedback configuration. Does there exists a \(K\) such that the system is stable for both \(a = 1\) and \(a = -1\).
Exercise 19.2
For \(P (s)\) and \(K(s)\) given by
\[P(s)=\frac{1}{(s+2)(s+a)}, \quad K(s)=\frac{1}{s}\nonumber\]
find the range of \(a\) such that the closed loop system with \(P\) and \(K\) is stable.
Exercise 19.3
Let \(P\) be given by:
\[P(s)=(1+W(s) \Delta(s)) P_{0}\nonumber\]
where
\[P_{0}(s)=\frac{1}{s-1}, \quad W(s)=\frac{2}{s+10}\nonumber\]
and \(\Delta\) is arbitrary stable with \(\|\Delta\|_{\infty} \leq 2\). Find a controller \(K(s) = k\) (constant) gain such that the system is stable. Compute all possible such gains.
Exercise 19.4
Find the stability robustness condition for the set of plant described by:
\[P=\left\{\frac{P_{0}}{1+\Delta W P_{0}}, \quad\|\Delta\|_{\infty} \leq 1\right\}\nonumber\]
Assume \(WP_{0}\) is strictly proper for well posedness.
Exercise 19.5
Suppose
\[P(s)=\frac{1}{s-a} \text { and } \quad \mathrm{K}(\mathrm{s})=10\nonumber\]
are connected in standard feedback configuration. While it is easy in this case to compute the exact stability margin as \(a\) changes, in general, such problems are hard to solve when there are many parameters. One approach is to embed the problem in a robust stabilization problem with unmodeled dynamics and derive the appropriate stability robustness condition. Clearly, the later provides a conservative bound on \(a\) for which the system remains stable.
(a) Find the exact range of \(a\) for which the system is stable.
(b) Assume the nominal plant is \(P_{0}=\frac{1}{s}\). Show that \(P\) belongs to the set of plants:
\[\Omega=\left\{P=\frac{P_{0}}{1+W \Delta P_{0}},\|\Delta\|_{\infty} \leq 1\right\}\nonumber\]
and \(W = -a\).
(c) Derive a condition on the closed loop system that guarantees the stability of the set \(\Omega\). How does this condition constrain \(a\)? Is this different than part (a)?
(d) Repeat with nominal plant \(P_{0}=\frac{1}{s+100}\)
Exercise 19.6
Let a model be given by the stable plant:
\[P_{0}(z)=\frac{1}{z^{-1}-\left(1+a_{0}\right)}, \quad 1>>a_{0}>0\nonumber\]
Consider the class of plants given by:
\[\Omega=\left\{(z)=\frac{1}{z^{-1}-(1+b)} \mid-2 a_{0} \leq b \leq 2 a_{0}\right\}\nonumber\]
- Can the set \(\Omega\) be embedded in a set of additive or multiplicative norm bounded perturbations, with nominal plant \(P_{0}\)? Show how or explain your answer.
- If your answer to the previous part is NO, show that the class \(\Omega\) can be embedded in some other larger set characterized by norm-bounded perturbations. Give a sufficient condition for stability using the small gain theorem.
- Improve your earlier condition so that it captures the fact that the unknown is a real parameter. (The condition does not have to be necessary, but should still take into consideration the phase information!).
Exercise 19.7
Consider Exercise 17.4. Suppose that due to implementation problems (e.g. quantization effects), the actual controller can be modeled as:
\[K_{a}=(I-K W \Delta)^{-1} K\nonumber\]
where \(W\) is a fixed stable filter, and \(\Delta\) is a stable perturbation of \(\mathcal{H}_{\infty}\)-norm less than 1, but otherwise arbitrary. Provide a non-conservative condition for the stability robustness of the closed loop system. Use the parametrization of \(K\) in terms of \(Q\) to express your condition as a function of \(P\) and \(Q\).
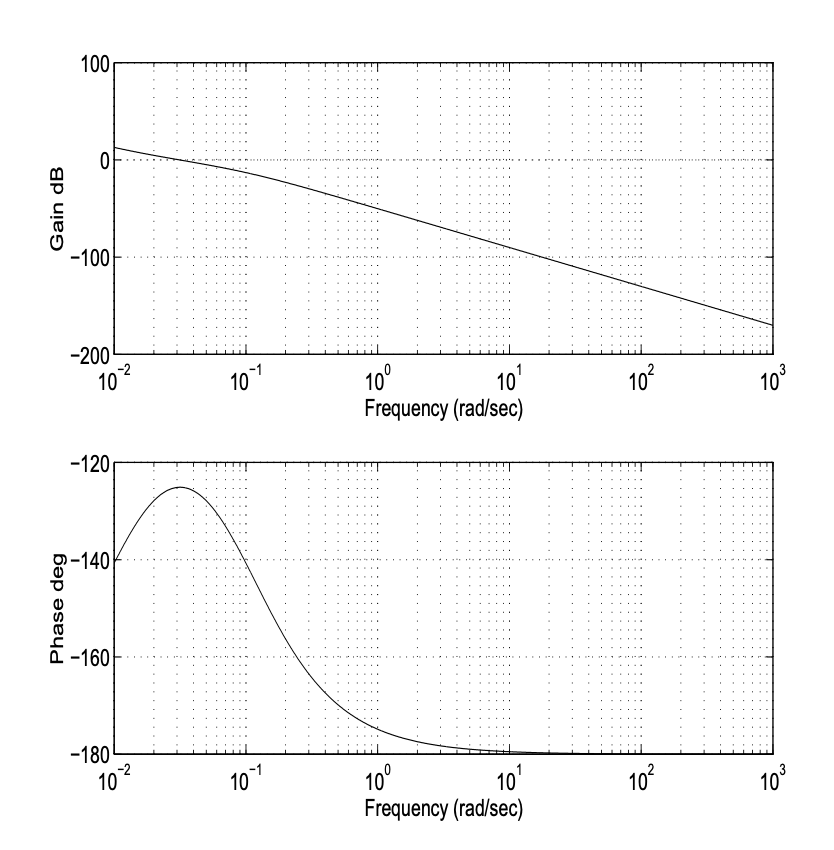
Figure 19.13: Loop Gain \(P_{0} K_{1}\)