
1.4: Units of Measurement
- Page ID
- 42943

The two most commonly used systems in science and technology are the International System of Units (SI Units) and the United States Customary System (USCS).
International System of Units
In the SI units, the arbitrarily defined base units include meter (m) for length, kilogram (kg) for mass, and second (s) for time The unit of force, newton (N), is derived from Newton’s second law. One newton is the force required to give a kilogram of mass an acceleration of 1 \(\mathrm{m} / \mathrm{s}^{2}\). The magnitude, in newton, of the weight of a body of mass \(m\) is written as follows:
\[(W(\mathrm{N})=m(\mathrm{kg}) \times g\left(\mathrm{m} / \mathrm{s}^{2}\right)\]
where
\[g=9.81 \mathrm{m} / \mathrm{s}^{2}\]
United States Customary System
In the United States Customary System, the base units include foot (ft) for length, second (s) for time, and pound (lb) for force. The slug for mass is a derived unit. One slug is the mass accelerated at 1 \(\mathrm{ft} / \mathrm{s}^{2}\) by a force of 1 lb. The mass of a body, in slug, is determined as follows:
\[\mathrm{m}(\mathrm{slugs})=\frac{W(l b)}{g\left(\frac{f t}{s^{2}}\right)},\]
where \(\mathrm{g}=32.2 \mathrm{ft} / \mathrm{s}^{2}\).
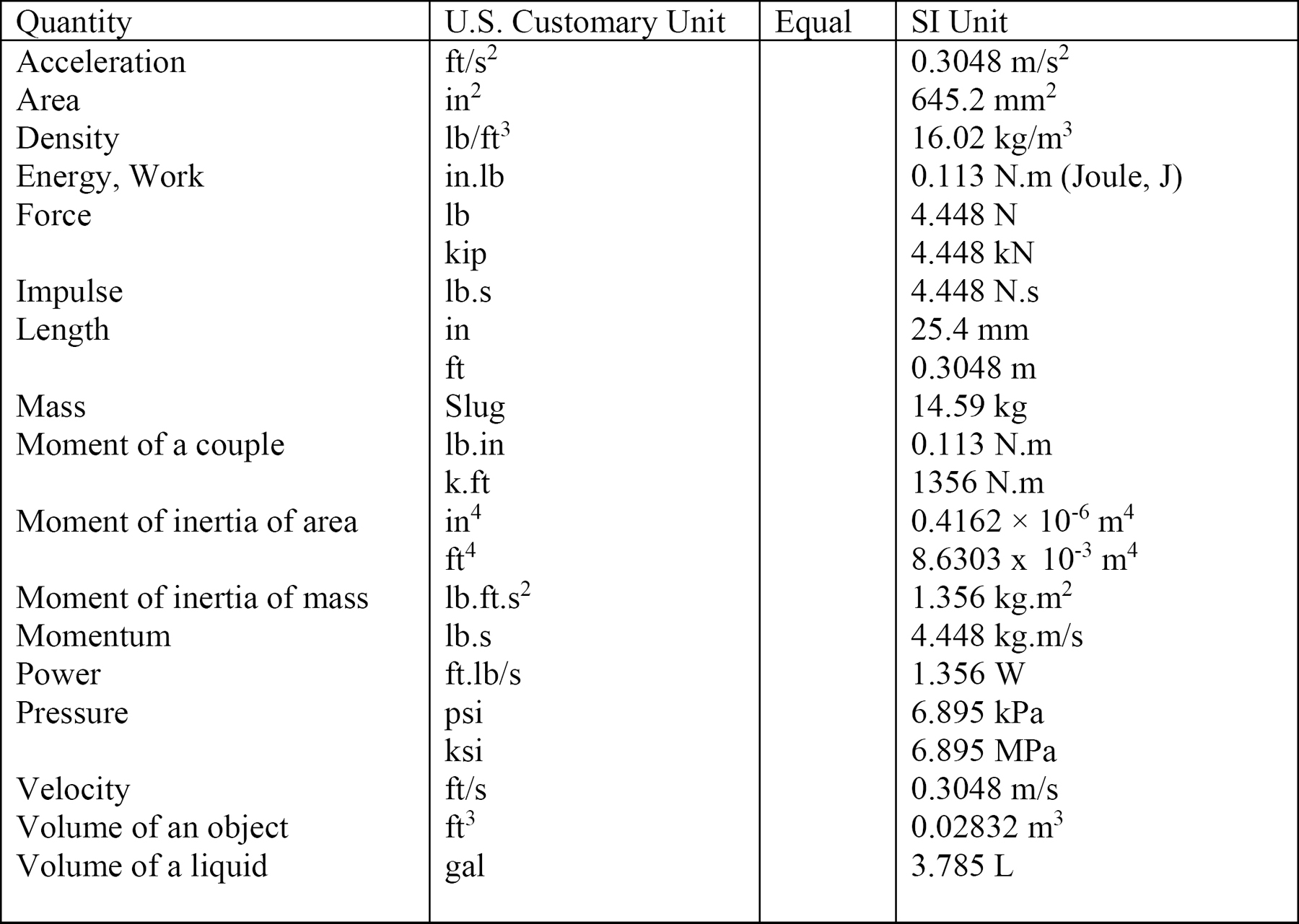
The two systems of units are summarized in Table 1.1 below.
Table 1.1. Comparison of unit measurement systems.

Table 1.2. Unit conversion.
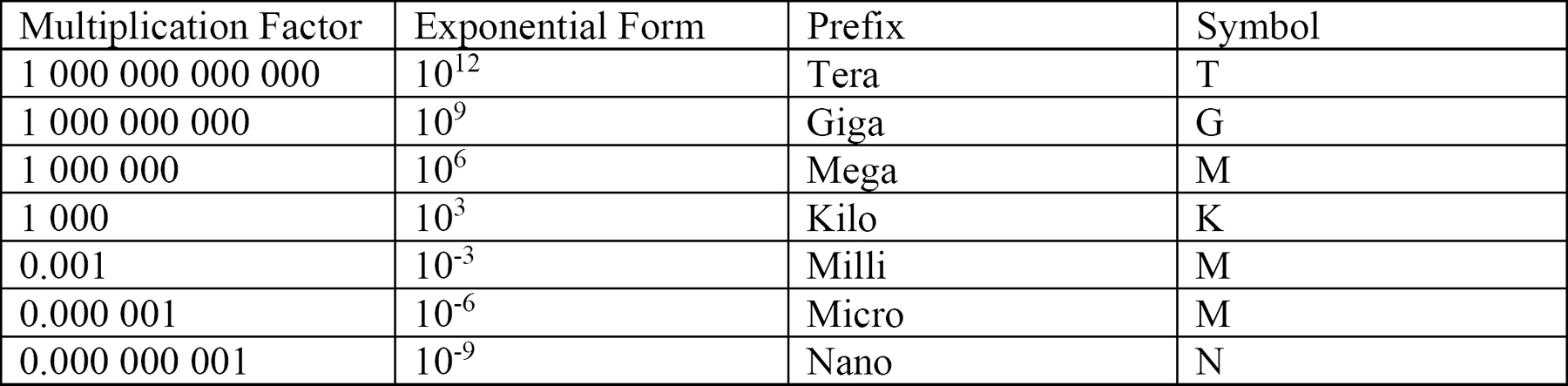
SI Prefixes
Prefixes are used in the International System of Units when numerical quantities are quite large or small. Some of these prefixes are presented in Table 1.3.
Table 1.3. SI prefixes.
Chapter Summary
Introduction to structural analysis: Structural analysis is defined as the prediction of structures’ behavior when subjected to specified arbitrary external loads.
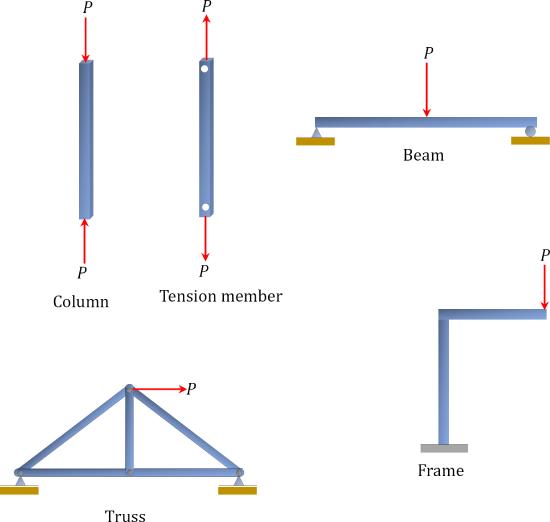
Types of structures: Structural members can be classified as beams, columns and tension structures, frames, and trusses.
Fundamental concepts of structural analysis: The fundamental concept and principles of structural analysis discussed in the chapter include equilibrium conditions, compatibility of displacement, principle of superposition, work-energy principle, virtual work principle, structural idealization, method of sections, and free-body diagram.