
5.6: Frames and Machines
- Page ID
- 53661

A frame or a machine is an engineering structure that that contains at least one member that is not a two-force member.
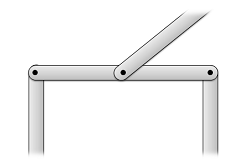
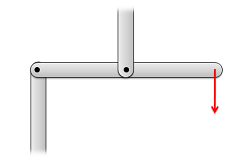
A frame is a rigid structure, while a machine is not rigid. This means that no part can move relative to the other parts in a frame, while parts can move relative to one another in a machine. Though there is a difference in vocabulary in describing frames and machines, they are grouped together here because we use the same process to analyze both of these structures.


Analyzing Frames and Machines:
When we talk about analyzing frames or machines, we are usually looking to identify both the external forces acting on the structure and the internal forces acting between members within the structure.
The method we use to analyze frames and machines (no special name here) centers around the process of breaking the structure down into individual components and analyzing each component as a rigid body. Where the components are connected, Newton's Third Law states that each body will exert an equal and opposite force on the other body. Each component will be analyzed as an independent rigid body leading to equilibrium equations for each component, but because of Newton's Third Law, some unknowns may show up acting on two bodies.