
5.8: Chapter 5 Homework Problems
- Page ID
- 53663

Exercise \(\PageIndex{1}\)
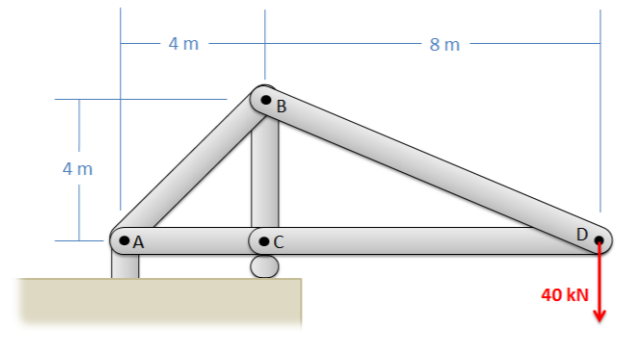
Use the method of joints to solve for the forces in each member of the lifting gantry truss shown below.
.png?revision=1)
- Solution
-
\(F_{AB} = 113.14\) kN T, \(F_{AC} = 80\) kN C, \(F_{BC} = 120\) kN C
\(F_{BD} = 89.44\) kN T, \(F_{CD} = 80\) kN C
Exercise \(\PageIndex{2}\)
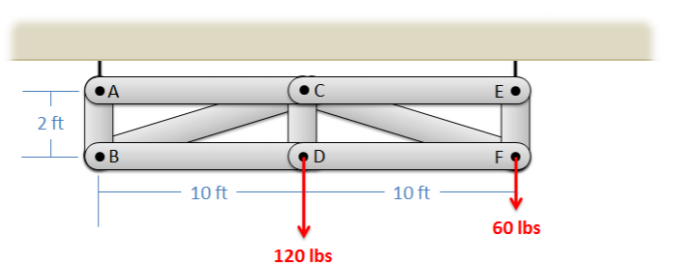
The truss shown below is supported by two cables at A and E, and supports two lighting rigs at D and F, as shown by the loads. Use the method of joints to determine the forces in each of the members.
.png?revision=1)
- Solution
-
\(F_{AB} = 60\) lbs T, \(F_{AC} = 0\), \(F_{BC} = 305.94\) lbs C
\(F_{BD} = 300\) lbs T, \(F_{CD} = 120\) lbs T, \(F_{CE} = 0\)
\(F_{CF} = 305.94\) lbs C, \(F_{DF} = 300\) lbs T, \(F_{EF} = 120\) lbs T
Exercise \(\PageIndex{3}\)
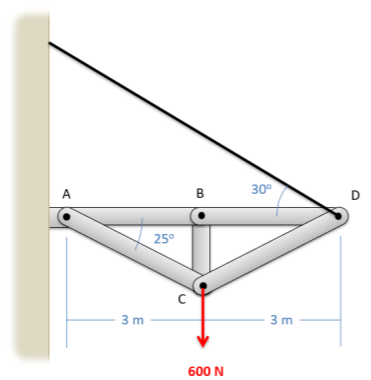
The truss shown below is supported by a pin joint at A, a cable at D, and is supporting a 600 N load at point C. Use the method of joints to determine the forces in each of the members. Assume the mass of the beams are negligible.
.png?revision=1)
- Solution
-
\(F_{AB} = 1162.97\) N C, \(F_{AC} = 709.86\) N T, \(F_{BC} = 0\)
\(F_{BD} = 1162.97\) N C, \(F_{CD} = 709.86\) N T
Exercise \(\PageIndex{4}\)
The space truss shown below is being used to lift a 250 lb box. The truss is anchored by a ball-and-socket joint at C (which can exert reaction forces in the \(x\), \(y\), and \(z\) directions) and supports at A and B that only exert reaction forces in the y direction. Use the method of joints to determine the forces acting all members of the truss.
.png?revision=1)
- Solution
-
\(F_{AB} = 0\), \(F_{AC} = 144.33\) lbs T, \(F_{AD} = 204.09\) lbs C
\(F_{BC} = 144.33\) lbs T, \(F_{BD} = 204.09\) lbs C, \(F_{CD} = 288.68\) lbs T
Exercise \(\PageIndex{5}\)
Use the method of sections to solve for the forces acting on members CE, CF, and DF of the gantry truss shown below.
- Solution
-
\(F_{CE} = 0\), \(F_{CF} = 306.2\) lbs C, \(F_{DF} = 300.2\) lbs T
Exercise \(\PageIndex{6}\)
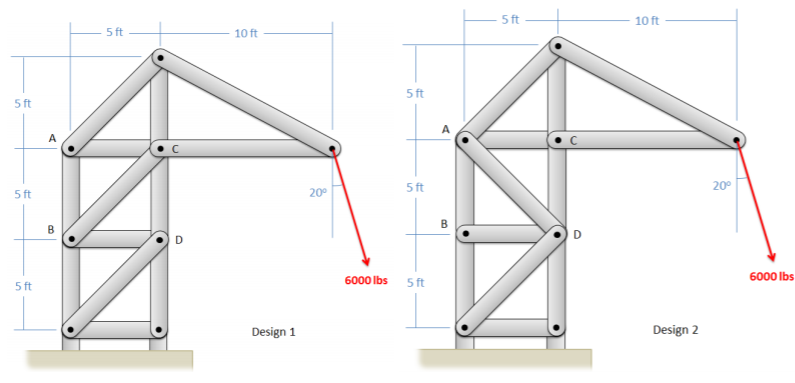
You are asked to compare two crane truss designs as shown below. Find the forces in members AB, BC, and CD for Design 1 and find forces AB, AD, and CD for Design 2. What member is subjected to the highest loads in either case?
.png?revision=1)
- Solution
-
Design 1: \(F_{AB} = 11,276\) lbs T, \(F_{BC} = 2902\) lbs T, \(F_{CD} = 18,967\) lbs C
Design 2: \(F_{AB} = 13,322\) lbs T, \(F_{AD} = 2902\) lbs C, \(F_{CD} = 16,914\) lbs C
The largest forces are in member CD for both designs.
Exercise \(\PageIndex{7}\)
The K truss shown below supports three loads. Assume only vertical reaction forces at the supports. Use the method of sections to determine the forces in members AB and FG. (Hint: you will need to cut through more than three members, but you can use your moment equations strategically to solve for exactly what you need).
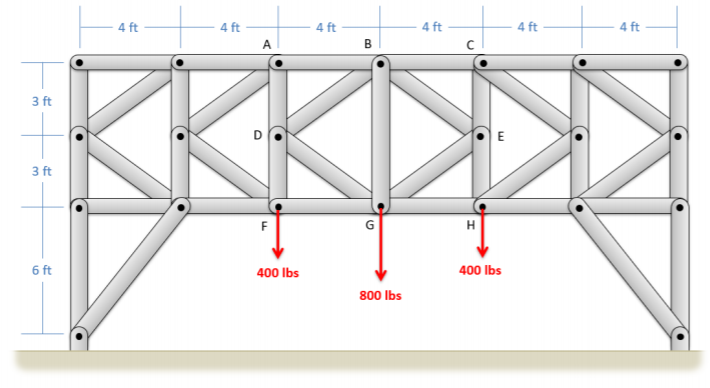.png?revision=1)
- Solution
-
\(F_{AB} = 1066.67\) lbs C, \(F_{FG} = 1066.67\) lbs T
Exercise \(\PageIndex{8}\)
The truss shown below is supported by a pin support at A and a roller support at B. Use the hybrid method of sections and joints to determine the forces in members CE, CF, and CD.
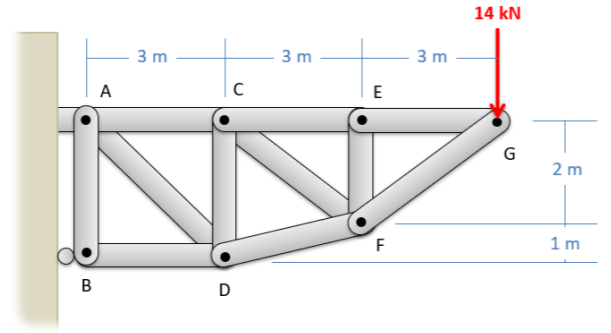.png?revision=1)
- Solution
-
\(F_{CE} = 21\) kN T, \(F_{CF} = 8.41\) kN T, \(F_{CD} = 4.67\) kN C
Exercise \(\PageIndex{9}\)
The shelf shown below is used to support a 50-lb weight. Determine the forces on members ACD and BC in the structure. Draw those forces on diagrams of each member.
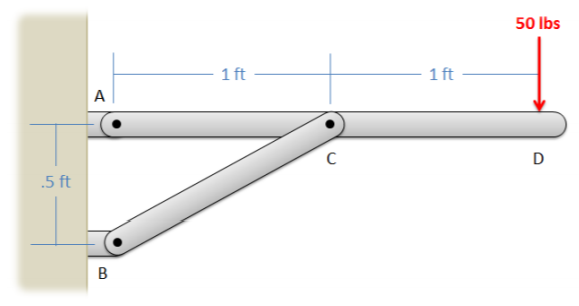.png?revision=1)
- Solution
-
\(F_{BC} = 223.6\) lbs (Compression), \(F_{A_X} = -200\) lbs, \(F_{A_Y} = -50\) lbs
Exercise \(\PageIndex{10}\)
A 20 N force is applied to a can-crushing mechanism as shown below. If the distance between points C and D is 0.1 meters, what are the forces being applied to the can at points B and D? (Hint: treat the can as a two-force member)
.png?revision=1)
- Solution
-
\(F_{can} = 148.9\) N (Compression)
Exercise \(\PageIndex{11}\)
The suspension system on a car is shown below. Assuming the wheel is supporting a load of 3300 N and assuming the system is in equilibrium, what is the force we would expect in the shock absorber (member AE)? You can assume all connections are pin joints.
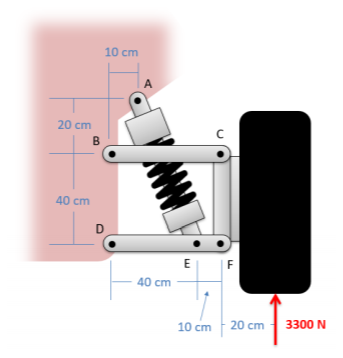.png?revision=1)
- Solution
-
\(F_{AE} = 4611.9\) N (Compression)
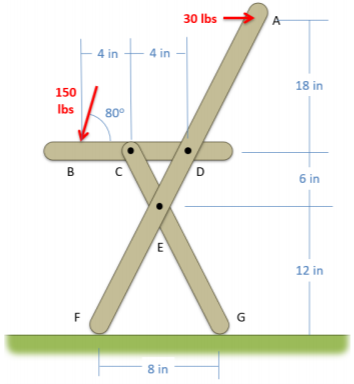
Exercise \(\PageIndex{12}\)
The chair shown below is subjected to forces at A and B by a person sitting in the chair. Assuming that normal forces exist at F and G, and that friction forces only act at point G (not at F), determine all the forces acting on each of the three members in the chair. Draw these forces acting on each part of the chair on a diagram.
.png?revision=1)
- Solution
-
\(F_F = 108.3\) lbs, \(F_{G_X} = -3.95\) lbs, \(F_{G_Y} = 39.5\) lbs
\(F_{C_X} = \pm \, 16.89\) lbs, \(F_{C_Y} = \pm \, 295.4\) lbs
\(F_{D_X} = \pm \, 142.9\) lbs, \(F_{D_Y} = \pm \, 147.7\) lbs
\(F_{E_X} = \pm \, 112.9\) lbs, \(F_{E_Y} = \pm \, 256.0\) lbs