
12.3: Rigid-Body General Planar Motion
- Page ID
- 54795

In general planar motion, bodies are both rotating and translating at the same time. As a result, we will need to relate the forces to the acceleration of the center of mass of the body as well as relating the moments to the angular accelerations.

To analyze a body undergoing general planar motion, we will start by drawing a free body diagram of the body in motion. Be sure to identify the center of mass, as well as identifying all known and unknown forces, and known and unknown moments acting on the body. It is also sometimes helpful to label any key dimensions as well as using dashed lines to identify any known accelerations or angular accelerations.
Next, we move on to identifying the equations of motion. At its core, this means going back to Newton's Second Law. Since this is a rigid body system, we include both the translational and rotational versions.
\[ \sum \vec{F} = m * \vec{a} \]
\[ \sum \vec{M} = I * \vec{\alpha} \]
As we did with the previous translational systems, we will break the force equation into components, turning the one vector equation into two scalar equations. Additionally, it's important to always use the center of mass for the accelerations in our force equations and take the moments and moment of inertia about the center of mass for our moment equation.
\[ \sum F_x = m * a_x \]
\[ \sum F_y = m * a_y \]
\[ \sum M_{COM} = I * \alpha \]
Plugging the known forces, moments, and accelerations into the above equations, we can solve for up to three unknowns. If more than three unknowns exist in the equations, we will sometimes have to go back to kinematics to relate quantities such as acceleration and angular acceleration.
Example \(\PageIndex{1}\)
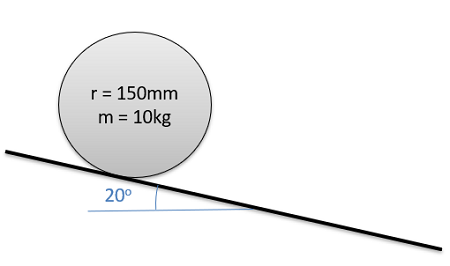
A cylinder with a radius of 0.15 m and a mass of 10 kg is placed on a ramp at a 20-degree angle. If the cylinder is released from rest and rolls without slipping, what is the initial angular acceleration of the cylinder and the time required for the cylinder to roll 5 meters?
- Solution
-
Video \(\PageIndex{2}\): Worked solution to example problem \(\PageIndex{1}\), provided by Dr. Majid Chatsaz. YouTube source: https://youtu.be/oQFVVC3SzZ0.
Example \(\PageIndex{2}\)
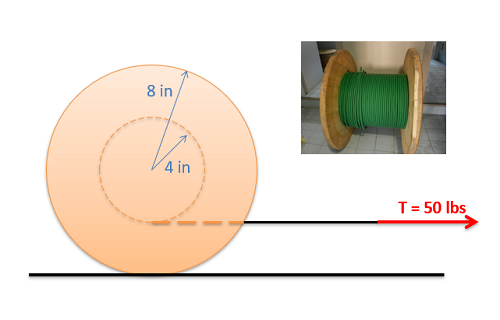
The cable spool shown below has a weight of 50 lbs and has a moment of inertia of 0.28 slug-ft2. Assume the spool rolls without slipping when we apply a 50-lb tension in the cable.
- What is the friction force between the spool and the ground?
- What is the acceleration of the center of mass of the spool?
- Solution
-
Video \(\PageIndex{3}\): Worked solution to example problem \(\PageIndex{2}\), provided by Dr. Majid Chatsaz. YouTube source: https://youtu.be/RAhLP-kMYaQ.
Example \(\PageIndex{3}\)
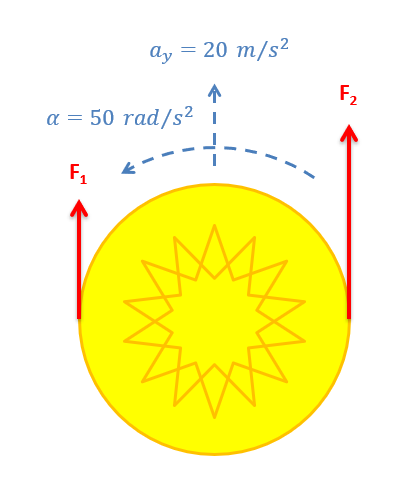
You are designing a Frisbee launcher to launch a 40-cm-diameter, 0.6 kg Frisbee that can be modeled as flat circular disc. If you want the Frisbee to have a linear acceleration of 20 m/s2 and an angular acceleration of 50 rad/s2 as shown below, what should \(F_1\) and \(F_2\) be?
- Solution
-
Video \(\PageIndex{4}\): Worked solution to example problem \(\PageIndex{3}\), provided by Dr. Majid Chatsaz. YouTube source: https://youtu.be/DY9B7oU0j7k.
Example \(\PageIndex{4}\)
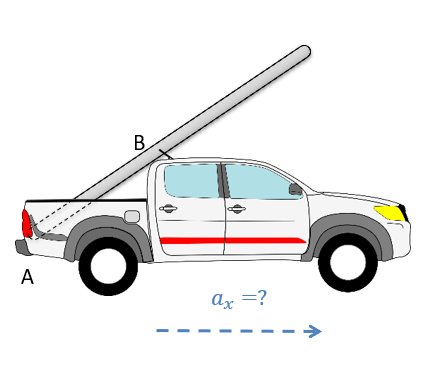
A pickup truck is carrying a 30-kg, 6-meter-long ladder at a 35-degree angle as shown below. The ladder is wedged against the tailgate at A and makes contact with the roof of the truck at B. The distance from A to B is 2 meters. At what rate of acceleration would we expect the ladder to start to rotate upwards?
- Solution
-
Video \(\PageIndex{5}\): Worked solution to example problem \(\PageIndex{4}\), provided by Dr. Majid Chatsaz. YouTube source: https://youtu.be/UO5XsDFxQoY.