
17.8: Appendix 2 Homework Problems
- Page ID
- 58427
Exercise \(\PageIndex{1}\)
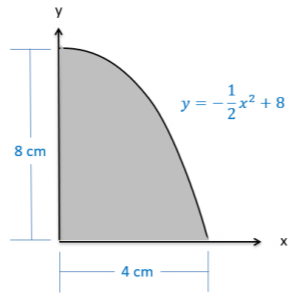
A shape is bounded on the left by the \(y\)-axis, on the bottom by the \(x\)-axis, and along its remaining side by the function \(y = - \dfrac{1}{2} x^2 + 8\). Determine the \(x\) and \(y\) coordinates of the centroid of this shape via integration. (Hint: for \(\bar{y}\), work from the top down to make the math easier.)
.png?revision=1)
- Solution:
-
\(\bar{x} = 1.5 \ cm, \, \bar{y} = 3.2 \ cm\)
Exercise \(\PageIndex{2}\)
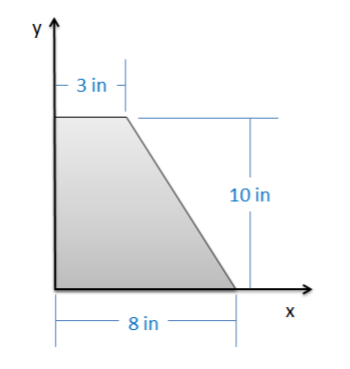
Determine the \(x\) and \(y\) coordinates of the centroid of the shape shown below via integration.
.png?revision=1)
- Solution:
-
\(\bar{x} = 2.94 \ in, \, \bar{y} = 4.24 \ in.\)
Exercise \(\PageIndex{3}\)
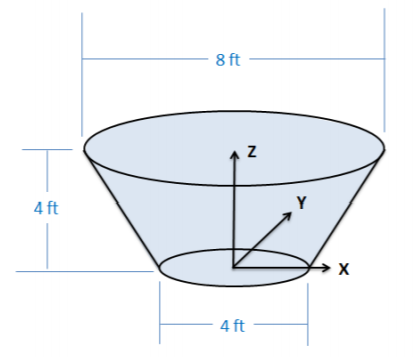
A water tank as shown below takes the form of an inverted, truncated cone. The diameter of the base is 4 ft, the diameter of the top is 8 ft, and the height of the tank is 4 ft. Using integration, determine the height of the center of mass of the filled tank. (Assume the tank is filled with water and the walls have negligible mass.)
.png?revision=1)
- Solution:
-
\(z_c = 2.43 \ ft\)
Exercise \(\PageIndex{4}\)
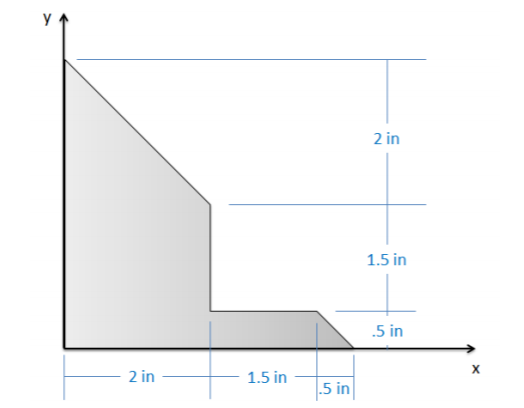
Use the method of composite parts to determine the centroid of the shape shown below.
.png?revision=1)
- Solution:
-
\(x_c = 1.14 \ in, \, y_c = 1.39 \ in\)
Exercise \(\PageIndex{5}\)
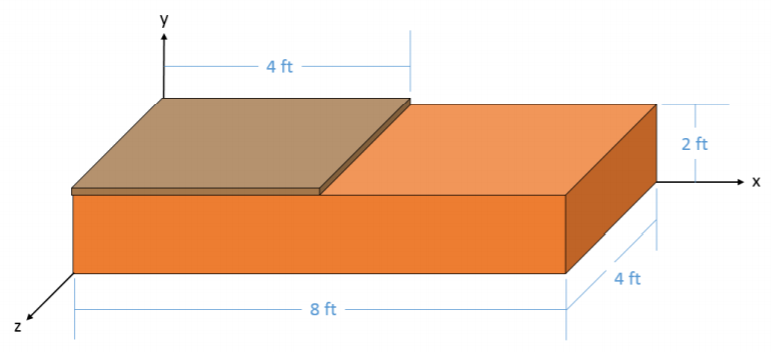
A floating platform consists of a square piece of plywood weighing 50 lbs with a negligible thickness on top of a rectangular prism of a foam material weighing 100 lbs as shown below. Based on this information, what is the location of the center of mass for the floating platform?
.png?revision=1)
- Solution:
-
\(x_c = 3.33 \ ft, \, y_c = 1.33 \ ft, \, z_c = 2 \ ft\)
Exercise \(\PageIndex{6}\)
Use the integration method to find the moments of inertia for the shape shown below…
- About the \(x\)-axis through the centroid.
- About the \(y\)-axis through the centroid.
.png?revision=1)
- Solution:
-
\(I_{xx} = 6.075 * 10^{-7} \ m^4\)
\(I_{yy} = 5.0625 * 10^{-8} \ m^4\)
Exercise \(\PageIndex{7}\)
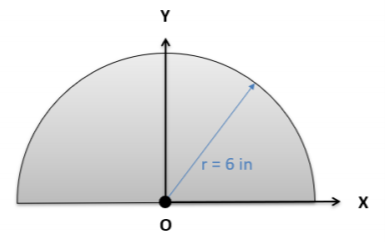
Use the integration method to find the polar moment of inertia for the semicircle shown below about point O.
.png?revision=1)
- Solution:
-
\(J_{zz} = 1017.9 \ in^4\)
Exercise \(\PageIndex{8}\)
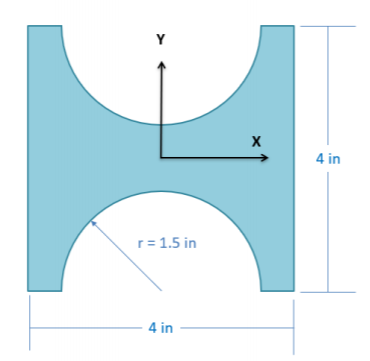
A plastic beam has a square cross-section with semicircular cutouts on the top and bottom as shown below. What is the area moment of inertia of the beam’s cross section about the \(x\) and \(y\) axes through the center point?
.png?revision=1)
- Solution:
-
\(I_{xx} = 7.08 \ in^4, \, I_{yy} = 17.36 \ in^4\)
Exercise \(\PageIndex{9}\)
A piece of angled steel has a cross section that is 1 cm thick and has a length of 6 cm on each side as shown below. What are the \(x\) and \(y\) area moments of inertia through the centroid of the cross section?
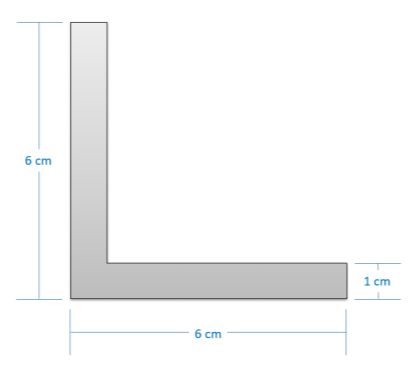.png?revision=1)
- Solution:
-
\(I_{xx} = I_{yy} = 35.462 \ cm^4 = 3.546 * 10^{-7} \ m^4\)
Exercise \(\PageIndex{10}\)
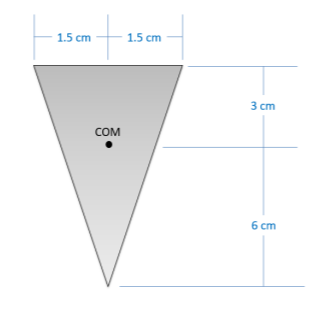
The pendulum in an antique clock consists of a brass disc with a mass of 0.25 kg and diameter of 6 cm at the end of a slender wooden rod with a mass of 0.1 kg. Determine the mass moment of inertia of the pendulum about the top of the rod.
.png?revision=1)
- Solution:
-
\(I_{zz} = 0.02026 \ kg \ m^2\)
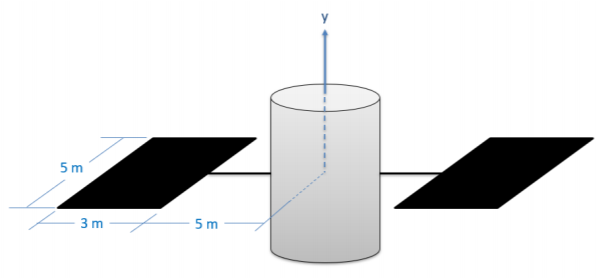
Exercise \(\PageIndex{11}\)
A space telescope can be approximated as a 600-kg cylinder with a 4-meter diameter and 4-meter height attached to two 100-kg solar panels as shown below. What is the approximate mass moment of inertia for the space telescope about the \(y\)-axis shown?
.png?revision=1)
- Solution:
-
\(I_{yy} = 10,216.7 \ kg \ m^2\)
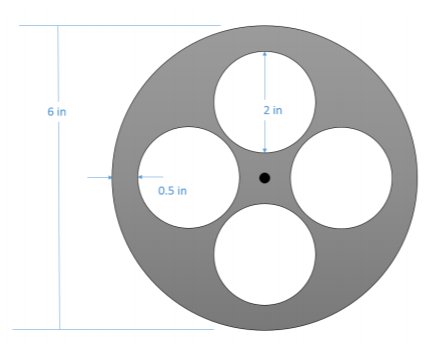
Exercise \(\PageIndex{12}\)
A flywheel has an original weight of 15 pounds and a diameter of 6 inches. To reduce the weight, four two-inch diameter holes are drilled into the flywheel, each leaving half an inch to the outside edge as shown below. What was the original polar mass moment of about the center point? Assuming a uniform thickness, what is the new mass moment of inertia after drilling in the holes? (Hint: holes count as negative mass in the mass moment calculations.)
.png?revision=1)
- Solution:
-
\(J_{without holes} = 0.01456 \ slug \ ft^2\)
\(J_{with holes} = 0.01060 \ slug \ ft^2\)