
5.2: Solution for a Beam on Roller Support
- Page ID
- 21498

Consider first case 1. From the constitutive equation, zero axial force beams that there is no extension of the beam axis, \(\epsilon^{\circ} = 0\). Then, from Equation (5.1.1)
\[\frac{du}{dx} = \frac{1}{2}\left(\frac{dw}{dx}\right)^2 \label{5.2.1}\]
At the same time, the nonlinear term in the vertical equilibrium vanishes and the beam response is governed by the linear differential equation
\[EI\frac{d^4w}{dx^4} = q(x)\]
which is identical to the one derived for the infinitesimal deflections. As an example, consider the pin-pin supported beam under mid-span point load. From Equations (4.3.7) and (4.3.8), the deflection profile is
\[w(x) = w_o \left[ 3 \frac{x}{l} − 4\left(\frac{x}{l}\right)^3\right]\]
and the slope is
\[\frac{dw}{dx} = \frac{w_o}{l}\left[3 − 12\left(\frac{x}{l}\right)^2\right]\]
where \(w_o\) is the central deflection of the beam. Now, Equation \ref{5.2.1} can be used to calculate relative horizontal displacement \(\Delta u\). Integrating Equation \ref{5.2.1} in the limits \((0, l)\) gives
\[\int_{0}^{l} \frac{du}{dx} dx= u|_{0}^{l} = u(l) − u(0) = \Delta u = − \int_{0}^{l} \frac{1}{2} \left( \frac{dw}{dx}\right)^2 dx\]
The result of the integration is
\[\Delta u \approx 7 \frac{w_{o}^2}{l}\]
In order to get a physical sense of the above result, the vertical and horizontal displacements are normalized by the thickness \(h\) of the beam
\[\frac{\Delta u}{h} = \frac{7}{l/h} \left(\frac{w_{o}}{h}\right)^2\]
For a beam with \(\frac{l}{h} = 21\), the result
\[\frac{\Delta u}{h} = \frac{1}{3} \left(\frac{w_{o}}{h}\right)^2\]
is ploted in Figure (\(\PageIndex{1}\)).
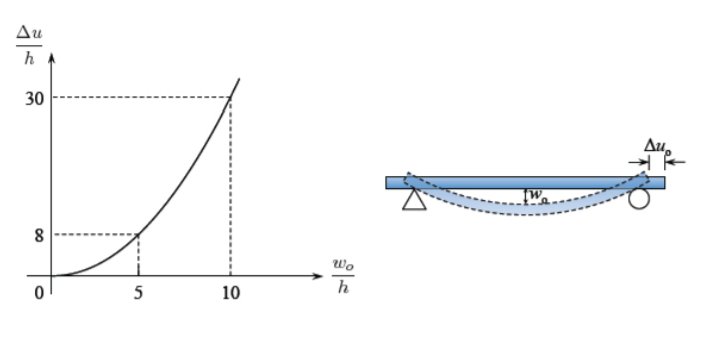
It is seen that the amount of sliding in the horizontal direction can be very large compared to the thickness.
To summarize the results, the roller supported beam can be treated as a classical beam even though the displacements and rotations are large (moderate). The solution of the linear differential equation can then be used a posteriori to determine the magnitude of sliding. The analysis of fully restrained beam is much more interesting and difficult. This is the subject of the next section.