
1.5: Representing Complex Numbers in Vector Space
- Page ID
- 9951

So far we have coded the complex number \(z=x+jy\) with the Cartesian pair \((x,y)\) and with the polar pair \((r∠θ)\). We now show how the complex number \(z\) may be coded with a two-dimensional vector \(z\) and show how this new code may be used to gain insight about complex numbers.
Coding a Complex Number as a Vector
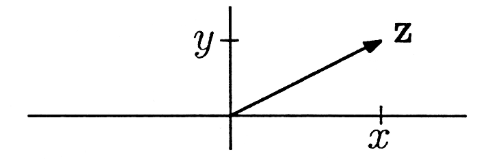
We code the complex number \(z=x+jy\) with the two-dimensional vector \(z=[xy]\):
\[x + jy = z ⇔ z = [xy] \nonumber \]
We plot this vector as in Figure. We say that the vector z belongs to a “vector space.” This means that vectors may be added and scaled according to the rules
\[z_1+z_2=[x_1+x_2y_1+y_2] \nonumber \]
\[az=\begin{bmatrix}ax\\ay\end{bmatrix} \nonumber \]
Furthermore, it means that an additive inverse −z, an additive identity 0, and a multiplicative identity 1 all exist
\[z+(−z)=0 \nonumber \]
\[lz=z \nonumber \]
The vector 0 is \(0=\begin{bmatrix}0\\0\end{bmatrix}\)
Prove that vector addition and scalar multiplication satisfy these properties of commutation, association, and distribution:
\[z_1+z_2 = z_2+z_1 \nonumber \]
\[(z_1+z_2)+z_3=z_1+(z_2+z_3) \nonumber \]
\[a(bz)=(ab)z \nonumber \]
\[a(z_1+z_2)=az_1+az_2 \nonumber \]
Inner Product and Norm
The inner product between two vectors z1 and z2 is defined to be the real number
\[(z_1,z_2)=x_1x_2+y_1y_2 \nonumber \]
We sometimes write this inner product as the vector product (more on this in Linear Algebra)
\[(z_1,z_2) = z^T_1z_2 \nonumber \]
\[=\begin{bmatrix}x_1 & y_1\\\end{bmatrix}\begin{bmatrix}x_2\\y_2\end{bmatrix}=\Bigl(x_1x_2+y_1y_2\Bigr) \nonumber \]
Prove \((z_1,z_2)=(z_2,z_1)\).
When \(z_1=z_2=z\), then the inner product between \(z\) and itself is the norm squared of \(z\):
\[||z||^2=(z,z)=x^2+y^2 \nonumber \]
These properties of vectors seem abstract. However, as we now show, they may be used to develop a vector calculus for doing complex arithmetic.
A Vector Calculus for Complex Arithmetic
The addition of two complex numbers \(z_1\) and \(z_2\) corresponds to the addition of the vectors \(z_1\) and \(z_2\):
\[z_1+z_2⇔z_1+z_2=\begin{bmatrix}x_1+x_2\\y_1+y_2\end{bmatrix} \nonumber \]
The scalar multiplication of the complex number \(z_2\) by the real number \(x_1\) corresponds to scalar multiplication of the vector \(z_2\) by \(x_1\)
\[x_1z_2⇔x_1\begin{bmatrix}x_2\\y_2\end{bmatrix}=\begin{bmatrix}x_1x_2\\x_1y_2\end{bmatrix} \nonumber \]
Similarly, the multiplication of the complex number \(z_2\) by the real number \(y_1\) is
\[y_1z_2⇔y_1\begin{bmatrix}x_2\\y_2\end{bmatrix}=\begin{bmatrix}y_1x_2\\y_1y_2\end{bmatrix} \nonumber \]
The complex product \(z_1z_2 = (x_1+jy_1)z_2\) is therefore represented as
\[z_1z_2↔\begin{bmatrix}x_1x_2−y_1y_2\\x_1y_2+y_1x_2\end{bmatrix} \nonumber \]
This representation may be written as the inner product
\[z_1z_2=z_2z_1↔\begin{bmatrix}(v,z_1)\\(w,z_1)\end{bmatrix} \nonumber \]
where v and w are the vectors \(v=\begin{bmatrix}x_2\\−y_2\end{bmatrix}\) and \(w=\begin{bmatrix}y_2\\x_2\end{bmatrix}\). By defining the matrix
\[\begin{bmatrix}x_2 & −y_2\\y_2 & x_2\end{bmatrix} \nonumber \]
we can represent the complex product \(z_1z_2\) as a matrix-vector multiply (more on this in Linear Algebra):
\[z_1z_2= z_2z_1 ↔\begin{bmatrix}x_2 & −y_2\\y_2 & x_2\end{bmatrix}\begin{bmatrix}x_1\\y_1\end{bmatrix} \nonumber \]
With this representation, we can represent rotation as
\[ze^{jθ}= e^{jθ}z ↔\begin{bmatrix}\cosθ & −\sinθ\\\sinθ & \cosθ\end{bmatrix}\begin{bmatrix}x_1\\y_1\end{bmatrix} \nonumber \]
We call the matrix \(\begin{bmatrix}\cosθ & −\sinθ\\\sinθ & \cosθ\end{bmatrix}\) a “rotation matrix.”
Call \(\mathrm R (θ)\) the rotation matrix:
\[\mathrm R (θ)=\begin{bmatrix}\cosθ & −\sinθ\\\sinθ & \cosθ\end{bmatrix} \nonumber \]
Show that \(\mathrm R (−θ)\) rotates by \((−θ)\). What can you say about \(\mathrm R (−θ)w\) when \(w=\mathrm R (θ)z\)?
Represent the complex conjugate of \(z\) as
\[z^∗↔\begin{bmatrix}a & b\\c & d\end{bmatrix}\begin{bmatrix}x\\y\end{bmatrix} \nonumber \]
and find the elements \(a,b,c,\) and \(d\) of the matrix.
Inner Product and Polar Representation
From the norm of a vector, we derive a formula for the magnitude of z in the polar representation \(z=re^{jθ}\)
\[r=(x^2+y^2)^{1/2} = ||z|| = (z,z)^{1/2} \nonumber \]
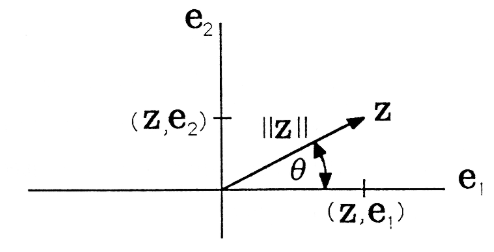
If we define the coordinate vectors \(e_1=\begin{bmatrix}1\\0\end{bmatrix}\) and \(e_2=\begin{bmatrix}0\\1\end{bmatrix}\), then we can represent the vector \(z\) as
\[z=(z,e_1)e_1 + (z,e_2)e_2 \nonumber \]
See Figure. From the figure it is clear that the cosine and sine of the angle \(θ\) are
\[\cosθ=\frac {(z,e1)} {||z||};\; \sinθ = \frac {(z,e_2)} {||z||} \nonumber \]
This gives us another representation for any vector z:
\[z=||z||\cosθe_1+||z||\sinθe_2 \nonumber \]
The inner product between two vectors \(z_1\) and \(z_2\) is now
\[(z_1,z_2)=[(z_1,e_1)e^T_1(z_1,e_2)e^T_2]\begin{bmatrix}(z_2,e_1)e_1\\(z_2,e_2)e_2\end{bmatrix} \nonumber \]
\[=(z_1,e_1)(z_2,e_1)+(z_1,e_2)(z_2,e_2) \nonumber \]
\[=||z_1||cosθ_1||z_2||cosθ_2+||z_1||sinθ_1||z2||sinθ_2 \nonumber \]
It follows that \(\cos(θ_2−θ_1)=\cosθ_2 \cos θ_1+\sinθ_1\sinθ_2\) may be written as
\[\cos(θ_2−θ_1)=\frac {(z_1,z_2)} {||z_1||\,||z_2||} \nonumber \]
This formula shows that the cosine of the angle between two vectors \(z_1\) and \(z_2\), which is, of course, the cosine of the angle of \(z_2z^∗_1\), is the ratio of the inner product to the norms.
Prove the Schwarz and triangle inequalities and interpret them:
\[(\mathrm {Schwarz})\; (z_1,z_2)^2≤||z_1||^2||z_2||^2 \nonumber \]
\[(\mathrm {Triangle})\; I\,||z_1−z_2||≤||z_1−z_3||+||z_2−z_3|| \nonumber \]