17.3: F.3 Symmetry of the stress tensor
- Page ID
- 18115
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)The symmetry of the stress tensor will be demonstrated in two ways. The first is fairly intuitive. We argue that stress components located above and below the main diagonal represent torques that are equal but opposite. If the tensor is symmetric, then, those torques add up to zero. This simple argument is deficient in that (1) it does not show why the torques should add to zero, and (2) it neglects the spatial variability of the stress tensor. We will address these issues in the more rigorous version that follows.
F.3.1 The hand-waving argument
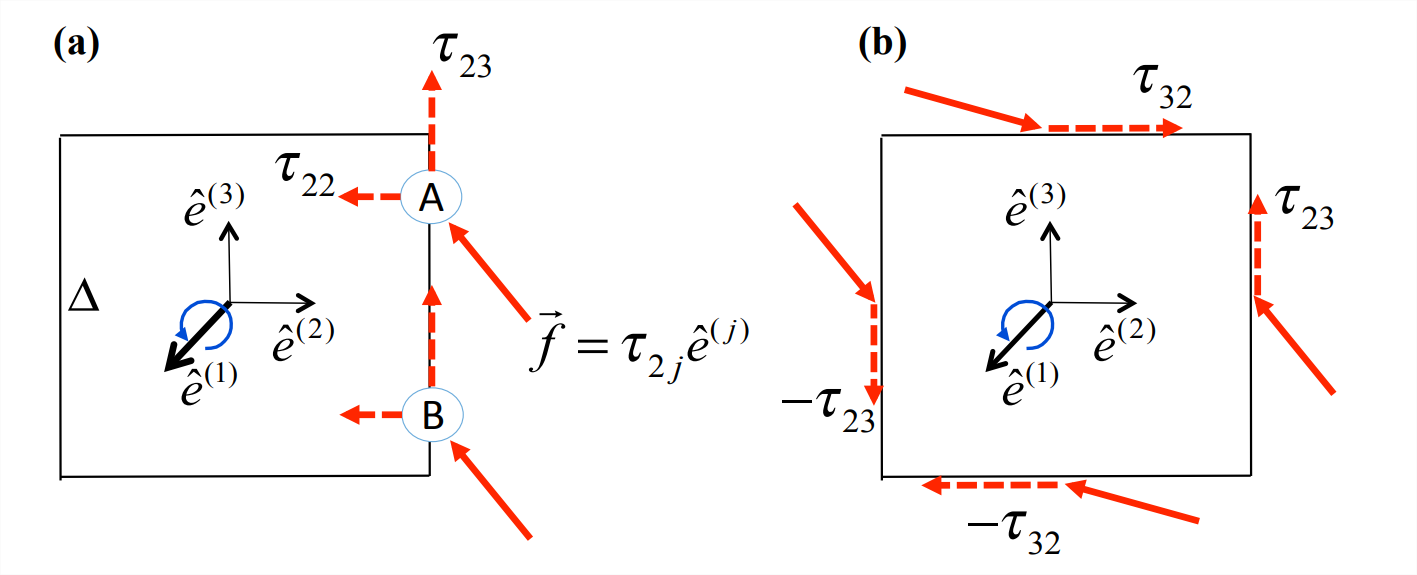
Consider a cube with edge length \(\Delta\), as shown in Figure \(\PageIndex{1}\)a, and the distribution of forces that act to rotate the cube counterclockwise about \(\hat{e}^{(1)}\) (blue arrow). Assume that the stress tensor is uniform in space.
Consider the point labelled “A”, which is located above the \(x_2\)-axis at \(x_2\) = \(\Delta/2\). The force (per unit area) \(\vec{f}\) acting on the right hand face at this point can be resolved into two components vectors \(\tau_{23}\hat{e}^{(3)}\) and \(\tau_{22}\hat{e}^{(2)}\) as shown by the dashed arrows. As drawn here, \(\tau_{23}\) > 0 and \(\tau_{22}\) < 0, and each component exerts a counterclockwise torque about \(\hat{e}^{(1)}\).
Now, consider the force acting at point B, which is located the same distance below the \(x_2\)-axis. Because the stress tensor is uniform, the force is the same, but now the normal component \(\tau_{22}\hat{e}^{(2)}\) exerts a clockwise torque, equal but opposite to that exerted by the same component at point A. The torque exerted by the tangential component \(\tau_{23}\hat{e}^{(3)}\) is unchanged. You can now imagine that, if we integrate over the right-hand face, the net torque exerted by the normal force component \(\tau_{22}\hat{e}^{(2)}\) will vanish by symmetry, i.e., the net torque is due entirely to the tangential force component.
Now examine Figure \(\PageIndex{1}\)b. On the left-hand face, the applied force is reversed because the unit normal is \(-\hat{e}^{(2)}\). The tangential component is directed oppositely to that on the right-hand face, but the torque it exerts is the same.
Next we consider the upper face. The force acting there is \(\tau_{3j}\hat{e}^{(j)}\), and its tangential component is \(\tau_{32}\hat{e}^{(2)}\). As drawn here, \(\tau_{32}\) > 0, and the torque is clockwise. On the bottom face, the force is again opposite but the torque is the same. We now conclude that the net torque about \(\hat{e}^{(1)}\) is proportional to the difference between \(\tau_{23}\) and \(\tau_{32}\). If \(\tau_{23}\) = \(\tau_{32}\), the net torque about \(\hat{e}^{(1)}\) is zero.
Repeating this analysis for rotations about the other two axes, we find that the condition for equilibrium is \(\tau_{ij}\) = \(\tau_{ji}\).
F.3.2 The quantitative argument
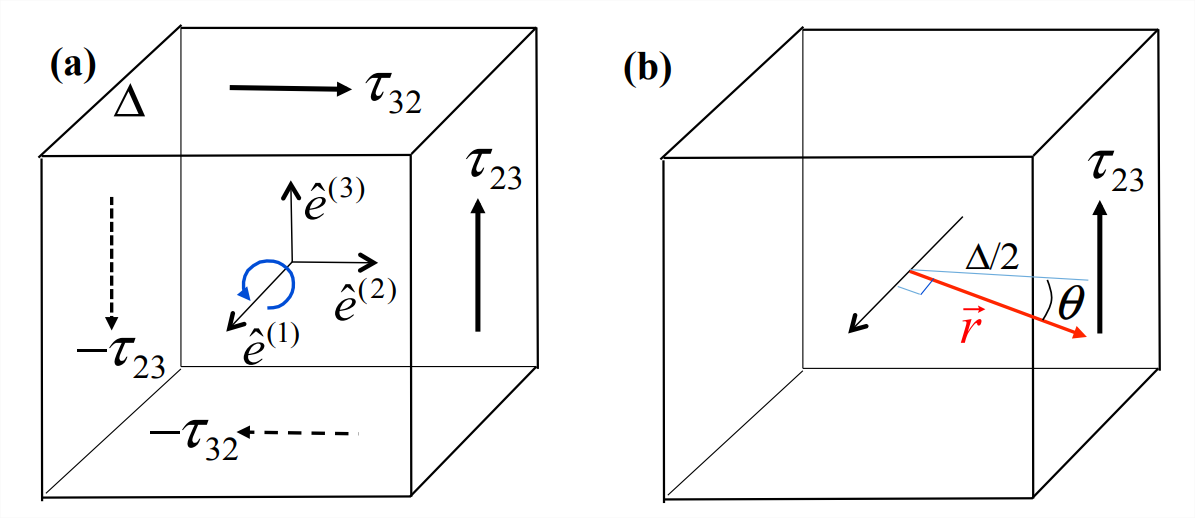
As before, consider a cube with edge length \(\Delta\), as shown in Figure \(\PageIndex{2}\)a, and the distribution of stresses that act to rotate the cube about \(\hat{e}^{(1)}\). Our plan is to compute the torque on each face and add the results.
On the right-hand face, the unit normal is \(\hat{e}^{(2)}\). The force component \(\tau_{23}\) acts in the “3” direction. The torque per unit area at any point is the stress vector crossed with the moment arm \(\vec{r}\) (Figure \(\PageIndex{2}\)b), which is the perpendicular distance from the “1” axis to the point where the force acts. The magnitude of that cross product is just \(|\tau_{23}|\) times \(|\vec{r}| \cos \theta\), where \(\theta\) is the angle between \(\vec{r}\) and the horizontal, and this in turn is equal to \(|\tau_{23}|\Delta/2\). If \(\tau_{23}\) is positive as shown, then the torque is positive (i.e., counterclockwise).
Now expand \(\tau_{23}\) in a first-order Taylor series about the origin:
\[\tau_{23}\left(x, \frac{\Delta}{2}, z\right)=\tau_{23}^{0}+\frac{\partial \tau_{23}^{0}}{\partial x} x+\frac{\partial \tau_{23}^{0}}{\partial y} \frac{\Delta}{2}+\frac{\partial \tau_{23}^{0}}{\partial z} z+O\left(\Delta^{2}\right).\label{eqn:1} \]
The superscript “0” denotes the value of \(\tau_{23}\) or one of its derivatives evaluated at the origin. The y coordinate has been set to the uniform value \(\Delta/2\) corresponding to the right-hand face. Integrating \(\tau_{23}\Delta/2\) over the right-hand face, we find
\[\begin{aligned}
T_{1}^{[r i g h t]} &=\int_{-\Delta / 2}^{\Delta / 2} d x \int_{-\Delta / 2}^{\Delta / 2} d z \frac{\Delta}{2} \tau_{23}\left(x, \frac{\Delta}{2}, z\right) \\
&=\Delta^{2} \frac{\Delta}{2}\left(\tau_{23}^{0}+\frac{\partial \tau_{23}^{0}}{\partial y} \frac{\Delta}{2}\right).
\end{aligned} \nonumber \]
Note that the terms in Equation \(\ref{eqn:1}\) proportional to \(x\) and \(z\) have integrated to zero.
The torque on the left-hand face is calculated similarly. The stress vector acts oppositely (downward, if \(\tau_{23}\) > 0), but the sign of \(\cos\theta\) is reversed, and those two changes cancel. Ultimately, the only difference is that the stress is evaluated at \(y\) = \(-\Delta/2\) rather than \(y\) = \(\Delta/2\), so that
\[T_{1}^{[l e f t]}=\Delta^{2} \frac{\Delta}{2}\left(\tau_{23}^{0}-\frac{\partial \tau_{23}^{0}}{\partial y} \frac{\Delta}{2}\right). \nonumber \]
The net torque on the right and left faces is
\[T_{1}^{[r i g h t]}+T_{1}^{[l e f t]}=\Delta^{3} \tau_{23}^{0}. \nonumber \]
The torques on the top and bottom faces are calculated in the same manner, and give \(-\Delta^3\tau^0_{32}\), so that the net torque about \(\hat{e}^{(1)}\) is
\[T_{1}=\Delta^{3}\left(\tau_{23}^{0}-\tau_{32}^{0}\right). \nonumber \]
Now the rotational form of Newton’s second law states that this torque equals \(I_{11}\alpha_1\), where \(I_{11}\) is the moment of inertia for torque and rotation about \(\hat{e}^{(1)}\) and \(\alpha_1\) is the corresponding angular rotation. For this cube, \(I_{11}\) = \(\rho\Delta^5/6\) (appendix B), hence
\[\Delta^{3}\left(\tau_{23}^{0}-\tau_{32}^{0}\right)=\rho \frac{\Delta^{5}}{6} \alpha_{1}, \nonumber \]
or
\[\tau_{23}^{0}-\tau_{32}^{0}=\rho \frac{\Delta^{2}}{6} \alpha_{1}. \nonumber \]
We now take the limit as \(\Delta\rightarrow 0\). The right-hand side goes to zero (provided \(\alpha_1\) is finite) while the superscripts on the left-hand side become superfluous, leaving us with
\[\tau_{23}-\tau_{32}=0. \nonumber \]
The same calculation can be repeated for rotation about \(\hat{e}^{(2)}\) and \(\hat{e}^{(3)}\) with analogous results, so that
\[\tau_{i j}-\tau_{j i}=0,\label{eqn:2} \]
i.e., the stress tensor is symmetric at every point in space.