
4.4.2 Angular Acceleration Systems: Constant Density
- Page ID
- 679

For simplification reasons, the first case deals with a rotation in a perpendicular to the gravity. That effective body force can be written as
\[
\mathbf{g}_{eff} = - g\, \hat{k}+ \omega^2 r\; \hat{r}
\label{static:eq:GeffAngular}
\]
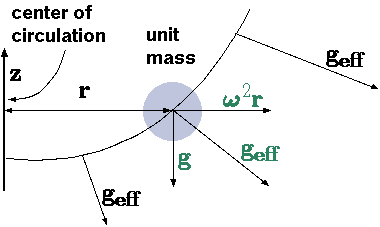
Fig. 4.16 Schematic to explain the angular angle.
The lines of constant pressure are not straight lines but lines of parabolic shape. The angle of the line depends on the radius as
\[
\dfrac{dz}{dr} = - \dfrac{g}{\omega^2\, r}
\label{static:eq:angularAngle}
\]
\[
z - z_0 = \dfrac{\omega^2\, r^2}{2\, g}
\label{static:eq:angularAngleI}
\]
Notice that the integration constant was substituted by \(z_0\). The constant pressure will be along
Angular Acceleration System
\[
\label{static:eq:angularPressure}
P - P_0 = \rho\, g \, \left[ (z_0 - z) +
\dfrac{\omega^2\,r^2}{ 2\,g} \right]
\]
To illustrate this point, example 4.11 is provided.
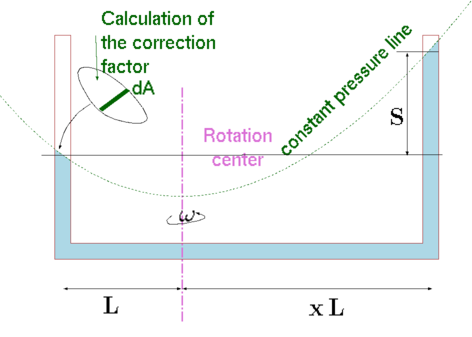
Fig. 4.17 Schematic angular angle to explain example .
Example 4.11
A "U'' tube with a length of \((1+x)L\) is rotating at angular velocity of \(\omega\). The center of rotation is a distance, \(L\) from the "left'' hand side. Because the asymmetrical nature of the problem there is difference in the heights in the \(U\) tube arms of \(S\) as shown in Figure 4.17. Expresses the relationship between the different parameters of the problem.
Solution 4.11
The pressure at the interface at the two sides of the tube is same. Thus, equation (132) represents the pressure line. Taking the "left'' wing of U tube
\[
\overbrace{z_l - z_0}^{\mbox{change in z direction}} =
\overbrace{\dfrac{\omega^2\,L^2}{2\,g}}^{\mbox{change in r direction}}
\]
The same can be said for the other side
\[
z_r - z_0 = \dfrac{\omega^2\,x^2\,L^2}{2\,g}
\]
Thus subtracting the two equations above from each each other results in
\[
z_r - z_l = \dfrac{L\,\omega^2\,\left(1 - x^2\right)}{2\,g}
\]
Example 4.12
Assume that the diameter of the U tube is \(R_t\). What will be the correction factor if the curvature in the liquid in the tube is taken in to account. How would you suggest to define the height in the tube?
Solution 4.12
In Figure 4.17 shows the infinitesimal area used in these calculations. The distance of the infinitesimal area from the rotation center is? The height of the infinitesimal area is? Notice that the curvature in the two sides are different from each other. The volume above the lower point is? which is only a function of the geometry.
Example 4.13
In the U tube in example 4.11 is rotating with upper part height of \(ll\). At what rotating velocity liquid start to exit the U tube? If the rotation of U tube is exactly at the center, what happen the rotation approach very large value?
Advance Material
Contributors and Attributions
Dr. Genick Bar-Meir. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or later or Potto license.