
14.3: Spider-Man
- Page ID
- 84551

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \) \( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)\(\newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\) \( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\) \( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\) \( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\) \( \newcommand{\Span}{\mathrm{span}}\) \(\newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\) \( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\) \( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\) \( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\) \( \newcommand{\Span}{\mathrm{span}}\)\(\newcommand{\AA}{\unicode[.8,0]{x212B}}\)
In this example we’ll develop a model of Spider-Man swinging from a springy cable of webbing attached to the top of the Empire State Building. Initially, Spider-Man is at the top of a nearby building, as shown in Figure 14.1.
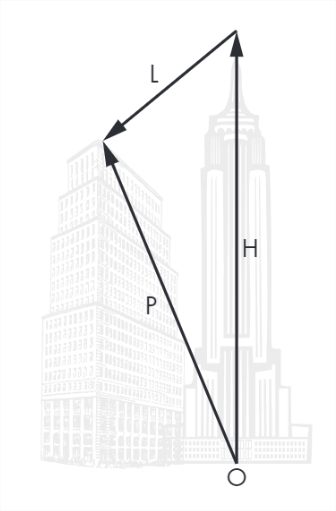
The origin, O, is at the base of the Empire State Building. The vector H represents the position where the webbing is attached to the building, relative to O. The vector P is the position of Spider-Man relative to O. And L is the vector from the attachment point to Spider-Man.
By following the arrows from O, along H, and along L, we can see that
H + L = PSo we can compute L like this:
L = P - HAs an exercise, simulate this system and estimate the parameters that maximize the distance Spider-Man swings.
- Implement a model of this scenario to predict Spider-Man’s trajectory.
- Choose the right time for Spider-Man to let go of the webbing in order to maximize the distance he travels before landing.
- Choose the best angle for Spider-Man to jump off the building, and the best time to let go of the webbing, to maximize range.
Use the following parameters:
- According to the Spider-Man Wiki (https://greenteapress.com/matlab/spider), Spider-Man weighs 76kg.
- Assume his terminal velocity is 60 m/s.
- The length of the web is 100 m.
- The initial angle of the web is 45° to the left of straight down.
- The spring constant of the web is 40 N/m when the cord is stretched and 0 N/m when it’s compressed.