
2.3: Framing
- Page ID
- 13948
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)2.3 Framing
2.3 Framing
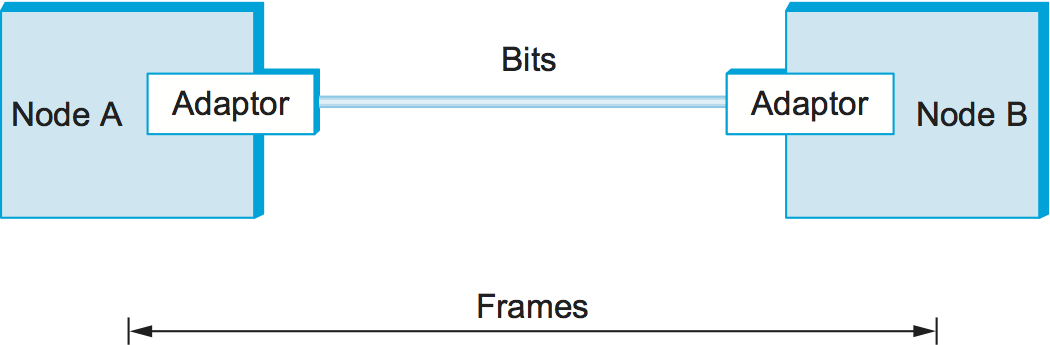
Now that we have seen how to transmit a sequence of bits over a point-to-point link—from adaptor to adaptor—let's consider the scenario in Figure 1. Recall from Chapter 1 that we are focusing on packet-switched networks, which means that blocks of data (called frames at this level), not bit streams, are exchanged between nodes. It is the network adaptor that enables the nodes to exchange frames. When node A wishes to transmit a frame to node B, it tells its adaptor to transmit a frame from the node's memory. This results in a sequence of bits being sent over the link. The adaptor on node B then collects together the sequence of bits arriving on the link and deposits the corresponding frame in B's memory. Recognizing exactly what set of bits constitutes a frame—that is, determining where the frame begins and ends—is the central challenge faced by the adaptor.
There are several ways to address the framing problem. This section uses three different protocols to illustrate the various points in the design space. Note that while we discuss framing in the context of point-to-point links, the problem is a fundamental one that must also be addressed in multiple-access networks like Ethernet and Wi-Fi.
Byte-Oriented Protocols (PPP)
One of the oldest approaches to framing—it has its roots in connecting terminals to mainframes—is to view each frame as a collection of bytes (characters) rather than a collection of bits. Early examples of such byte-oriented protocols are the Binary Synchronous Communication (BISYNC) protocol developed by IBM in the late 1960s, and the Digital Data Communication Message Protocol (DDCMP) used in Digital Equipment Corporation's DECNET. (Once upon a time, large computer companies like IBM and DEC also built private networks for their customers.) The widely used Point-to-Point Protocol (PPP) is a recent example of this approach.
At a high level, there are two approaches to byte-oriented framing. The first is to use special characters known as sentinel characters to indicate where frames start and end. The idea is to denote the beginning of a frame by sending a special SYN (synchronization) character. The data portion of the frame is then sometimes contained between two more special characters: STX (start of text) and ETX (end of text). BISYNC used this approach. The problem with the sentinel approach, of course, is that one of the special characters might appear in the data portion of the frame. The standard way to overcome this problem by "escaping" the character by preceding it with a DLE (data-link-escape) character whenever it appears in the body of a frame; the DLE character is also escaped (by preceding it with an extra DLE) in the frame body. (C programmers may notice that this is analogous to the way a quotation mark is escaped by the backslash when it occurs inside a string.) This approach is often called character stuffing because extra characters are inserted in the data portion of the frame.
The alternative to detecting the end of a frame with a sentinel value is to include the number of bytes in the frame at the beginning of the frame, in the frame header. DDCMP used this approach. One danger with this approach is that a transmission error could corrupt the count field, in which case the end of the frame would not be correctly detected. (A similar problem exists with the sentinel-based approach if the ETX field becomes corrupted.) Should this happen, the receiver will accumulate as many bytes as the bad count field indicates and then use the error detection field to determine that the frame is bad. This is sometimes called a framing error. The receiver will then wait until it sees the next SYN character to start collecting the bytes that make up the next frame. It is therefore possible that a framing error will cause back-to-back frames to be incorrectly received.
The Point-to-Point Protocol (PPP), which is commonly used to carry Internet Protocol packets over various sorts of point-to-point links, uses sentinels and character stuffing. The format for a PPP frame is given in Figure 2.

This figure is the first of many that you will see in this book that are used to illustrate frame or packet formats, so a few words of explanation are in order. We show a packet as a sequence of labeled fields. Above each field is a number indicating the length of that field in bits. Note that the packets are transmitted beginning with the leftmost field.
The special start-of-text character, denoted as the Flag field
is 01111110. The Address and Control fields
usually contain default values and so are uninteresting. The (Protocol)
field is used for demultiplexing; it identifies the high-level protocol,
such as IP. The frame payload size can be negotiated, but it is
1500 bytes by default. The Checksum field is either 2 (by default)
or 4 bytes long.
The PPP frame format is unusual in that several of the field sizes are negotiated rather than fixed. This negotiation is conducted by a protocol called the Link Control Protocol (LCP). PPP and LCP work in tandem: LCP sends control messages encapsulated in PPP frames—such messages are denoted by an LCP identifier in the PPP (Protocol) field—and then turns around and changes PPP's frame format based on the information contained in those control messages. LCP is also involved in establishing a link between two peers when both sides detect that communication over the link is possible (e.g., when each optical receiver detects an incoming signal from the fiber to which it connects).
Bit-Oriented Protocols (HDLC)
Unlike byte-oriented protocols, a bit-oriented protocol is not concerned with byte boundaries—it simply views the frame as a collection of bits. These bits might come from some character set, such as ASCII; they might be pixel values in an image; or they could be instructions and operands from an executable file. The Synchronous Data Link Control (SDLC) protocol developed by IBM is an example of a bit-oriented protocol; SDLC was later standardized by the ISO as the High-Level Data Link Control (HDLC) protocol. In the following discussion, we use HDLC as an example; its frame format is given in Figure 3.
HDLC denotes both the beginning and the end of a frame with the
distinguished bit sequence 01111110. This sequence is also transmitted
during any times that the link is idle so that the sender and receiver
can keep their clocks synchronized. In this way, both protocols
essentially use the sentinel approach. Because this sequence might
appear anywhere in the body of the frame—in fact, the bits 01111110
might cross byte boundaries—bit-oriented protocols use the analog of
the DLE character, a technique known as bit stuffing.

Bit stuffing in the HDLC protocol works as follows. On the sending side,
any time five consecutive 1s have been transmitted from the body of the
message (i.e., excluding when the sender is trying to transmit the
distinguished 01111110 sequence), the sender inserts a 0 before
transmitting the next bit. On the receiving side, should five
consecutive 1s arrive, the receiver makes its decision based on the next
bit it sees (i.e., the bit following the five 1s). If the next bit is a
0, it must have been stuffed, and so the receiver removes it. If the
next bit is a 1, then one of two things is true: Either this is the
end-of-frame marker or an error has been introduced into the bit stream.
By looking at the next bit, the receiver can distinguish between these
two cases. If it sees a 0 (i.e., the last 8 bits it has looked at are
01111110), then it is the end-of-frame marker; if it sees a 1 (i.e.,
the last 8 bits it has looked at are 01111111), then there must have
been an error and the whole frame is discarded. In the latter case, the
receiver has to wait for the next 01111110 before it can start
receiving again, and, as a consequence, there is the potential that the
receiver will fail to receive two consecutive frames. Obviously, there
are still ways that framing errors can go undetected, such as when an
entire spurious end-of-frame pattern is generated by errors, but these
failures are relatively unlikely. Robust ways of detecting errors are
discussed in a later section.
An interesting characteristic of bit stuffing, as well as character stuffing, is that the size of a frame is dependent on the data that is being sent in the payload of the frame. It is in fact not possible to make all frames exactly the same size, given that the data that might be carried in any frame is arbitrary. (To convince yourself of this, consider what happens if the last byte of a frame's body is the ETX character.) A form of framing that ensures that all frames are the same size is described in the next subsection.
Clock-Based Framing (SONET)
A third approach to framing is exemplified by the Synchronous Optical Network (SONET) standard. For lack of a widely accepted generic term, we refer to this approach simply as clock-based framing. SONET was first proposed by Bell Communications Research (Bellcore), and then developed under the American National Standards Institute (ANSI) for digital transmission over optical fiber; it has since been adopted by the ITU-T. SONET has been for many years the dominant standard for long-distance transmission of data over optical networks.
An important point to make about SONET before we go any further is that the full specification is substantially larger than this book. Thus, the following discussion will necessarily cover only the high points of the standard. Also, SONET addresses both the framing problem and the encoding problem. It also addresses a problem that is very important for phone companies—the multiplexing of several low-speed links onto one high-speed link. (In fact, much of SONET's design reflects the fact that phone companies have to be concerned with multiplexing large numbers of the 64-kbps channels that traditionally are used for telephone calls.) We begin with SONET's approach to framing and discuss the other issues following.
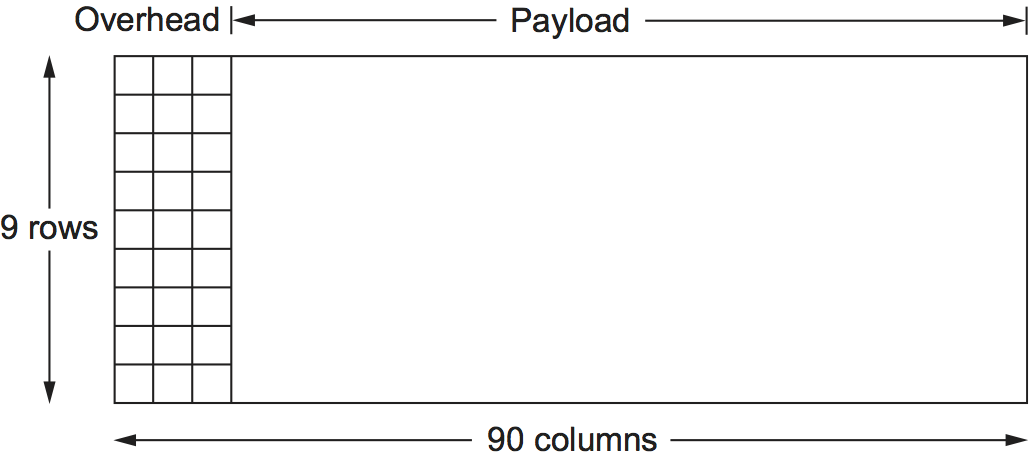
As with the previously discussed framing schemes, a SONET frame has some special information that tells the receiver where the frame starts and ends; however, that is about as far as the similarities go. Notably, no bit stuffing is used, so that a frame's length does not depend on the data being sent. So the question to ask is "How does the receiver know where each frame starts and ends?" We consider this question for the lowest-speed SONET link, which is known as STS-1 and runs at 51.84 Mbps. An STS-1 frame is shown in Figure 4. It is arranged as 9 rows of 90 bytes each, and the first 3 bytes of each row are overhead, with the rest being available for data that is being transmitted over the link. The first 2 bytes of the frame contain a special bit pattern, and it is these bytes that enable the receiver to determine where the frame starts. However, since bit stuffing is not used, there is no reason why this pattern will not occasionally turn up in the payload portion of the frame. To guard against this, the receiver looks for the special bit pattern consistently, hoping to see it appearing once every 810 bytes, since each frame is 9 90 = 810 bytes long. When the special pattern turns up in the right place enough times, the receiver concludes that it is in sync and can then interpret the frame correctly.
One of the things we are not describing due to the complexity of SONET is the detailed use of all the other overhead bytes. Part of this complexity can be attributed to the fact that SONET runs across the carrier's optical network, not just over a single link. (Recall that we are glossing over the fact that the carriers implement a network, and we are instead focusing on the fact that we can lease a SONET link from them and then use this link to build our own packet-switched network.) Additional complexity comes from the fact that SONET provides a considerably richer set of services than just data transfer. For example, 64 kbps of a SONET link's capacity is set aside for a voice channel that is used for maintenance.
The overhead bytes of a SONET frame are encoded using NRZ, the simple encoding described in the previous section where 1s are high and 0s are low. However, to ensure that there are plenty of transitions to allow the receiver to recover the sender's clock, the payload bytes are scrambled. This is done by calculating the exclusive OR (XOR) of the data to be transmitted and by the use of a well-known bit pattern. The bit pattern, which is 127 bits long, has plenty of transitions from 1 to 0, so that XORing it with the transmitted data is likely to yield a signal with enough transitions to enable clock recovery.
SONET supports the multiplexing of multiple low-speed links in the following way. A given SONET link runs at one of a finite set of possible rates, ranging from 51.84 Mbps (STS-1) to 39,813,120 Mbps (STS-786). Note that all of these rates are integer multiples of STS-1. The significance for framing is that a single SONET frame can contain subframes for multiple lower-rate channels. A second related feature is that each frame is 125 s long. This means that at STS-1 rates, a SONET frame is 810 bytes long, while at STS-3 rates, each SONET frame is 2430 bytes long. Notice the synergy between these two features: 3 810 = 2430, meaning that three STS-1 frames fit exactly in a single STS-3 frame.
STS stands for Synchronous Transport Signal, which is how SONET talks about frames. There is a parallel term—Optical Carrier (OC)—that is used to talk about the underlying optical signal that carries SONET frames. We say these two terms are parallel because STS-3 and OC-3, to use a concrete example, both imply a transmission rate of 155.52 Mbps. Since we're focused on framing here, we will stick with STS, but it is more likely that you will hear someone refer to an optical link by its "OC" name.
Intuitively, the STS-N frame can be thought of as consisting of N STS-1 frames, where the bytes from these frames are interleaved; that is, a byte from the first frame is transmitted, then a byte from the second frame is transmitted, and so on. The reason for interleaving the bytes from each STS-N frame is to ensure that the bytes in each STS-1 frame are evenly paced; that is, bytes show up at the receiver at a smooth 51 Mbps, rather than all bunched up during one particular 1/N of the 125-s interval.
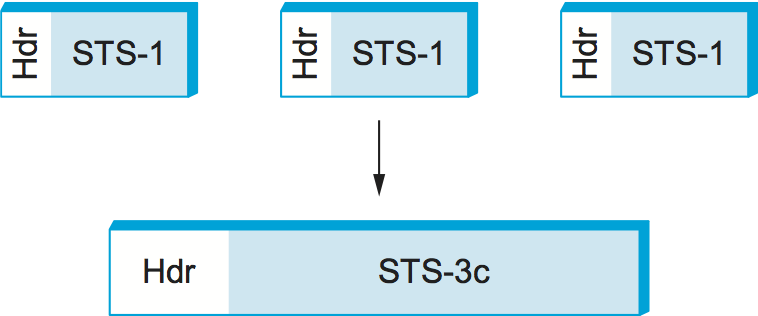
Although it is accurate to view an STS-N signal as being used to multiplex N STS-1 frames, the payload from these STS-1 frames can be linked together to form a larger STS-N payload; such a link is denoted STS-Nc (for concatenated). One of the fields in the overhead is used for this purpose. Figure 5 schematically depicts concatenation in the case of three STS-1 frames being concatenated into a single STS-3c frame. The significance of a SONET link being designated as STS-3c rather than STS-3 is that, in the former case, the user of the link can view it as a single 155.25-Mbps pipe, whereas an STS-3 should really be viewed as three 51.84-Mbps links that happen to share a fiber.
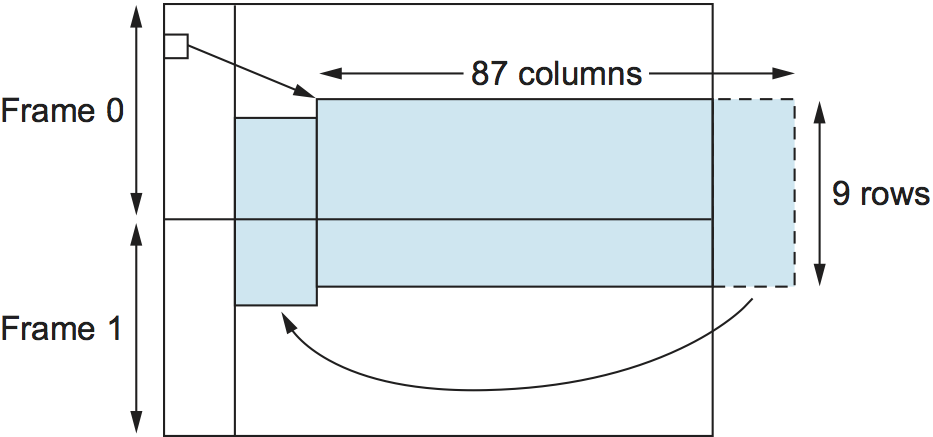
Finally, the preceding description of SONET is overly simplistic in that it assumes that the payload for each frame is completely contained within the frame. (Why wouldn't it be?) In fact, we should view the STS-1 frame just described as simply a placeholder for the frame, where the actual payload may float across frame boundaries. This situation is illustrated in Figure 6. Here we see both the STS-1 payload floating across two STS-1 frames and the payload shifted some number of bytes to the right and, therefore, wrapped around. One of the fields in the frame overhead points to the beginning of the payload. The value of this capability is that it simplifies the task of synchronizing the clocks used throughout the carriers' networks, which is something that carriers spend a lot of their time worrying about.