
2.7: Wireless Networks
- Page ID
- 13952
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)2.7 Wireless Networks
2.7 Wireless Networks
Wireless technologies differ from wired links in some important ways, while at the same time sharing many common properties. Like wired links, issues of bit errors are of great concern—typically even more so due to the unpredictable noise environment of most wireless links. Framing and reliability also have to be addressed. Unlike wired links, power is a big issue for wireless, especially because wireless links are often used by small mobile devices (like phones and sensors) that have limited access to power (e.g., a small battery). Furthermore, you can't go blasting away at arbitrarily high power with a radio transmitter—there are concerns about interference with other devices and usually regulations about how much power a device may emit at any given frequency.
Wireless media are also inherently multi-access; it's difficult to direct your radio transmission to just a single receiver or to avoid receiving radio signals from any transmitter with enough power in your neighborhood. Hence, media access control is a central issue for wireless links. And, because it's hard to control who receives your signal when you transmit over the air, issues of eavesdropping may also have to be addressed.
There is a baffling assortment of different wireless technologies, each of which makes different tradeoffs in various dimensions. One simple way to categorize the different technologies is by the data rates they provide and how far apart communicating nodes can be. Other important differences include which part of the electromagnetic spectrum they use (including whether it requires a license) and how much power they consume. In this section, we discuss two prominent wireless technologies: Wi-Fi (more formally known as 802.11), and Bluetooth. The next section discusses cellular networks in the context of ISP access services. Table 1 gives an overview of these technologies and how they compare to each other.
| Bluetooth (802.15.1) | Wi-Fi (802.11) | 4G Cellular | |
|---|---|---|---|
| Typical link length | 10 m | 100 m | Tens of kilometers |
| Typical data rate | 2 Mbps (shared) | 54 Mbps (shared) | 1-5 Mbps (per connection) |
| Typical use | Link a peripheral to a computer | Link a computer to a wired base | Link mobile phone to a wired tower |
| Wired technology analogy | USB | Ethernet | PON |
You may recall that bandwidth sometimes means the width of a frequency band in hertz and sometimes the data rate of a link. Because both these concepts come up in discussions of wireless networks, we're going to use bandwidth here in its stricter sense—width of a frequency band—and use the term data rate to describe the number of bits per second that can be sent over the link, as in Table 1.
Basic Issues
Because wireless links all share the same medium, the challenge is to share that medium efficiently, without unduly interfering with each other. Most of this sharing is accomplished by dividing it up along the dimensions of frequency and space. Exclusive use of a particular frequency in a particular geographic area may be allocated to an individual entity such as a corporation. It is feasible to limit the area covered by an electromagnetic signal because such signals weaken, or attenuate, with the distance from their origin. To reduce the area covered by your signal, reduce the power of your transmitter.
These allocations are typically determined by government agencies, such as the Federal Communications Commission (FCC) in the United States. Specific bands (frequency ranges) are allocated to certain uses. Some bands are reserved for government use. Other bands are reserved for uses such as AM radio, FM radio, television, satellite communication, and cellular phones. Specific frequencies within these bands are then licensed to individual organizations for use within certain geographical areas. Finally, several frequency bands are set aside for license-exempt usage—bands in which a license is not needed.
Devices that use license-exempt frequencies are still subject to certain restrictions to make that otherwise unconstrained sharing work. Most important of these is a limit on transmission power. This limits the range of a signal, making it less likely to interfere with another signal. For example, a cordless phone (a common unlicensed device) might have a range of about 100 feet.
One idea that shows up a lot when spectrum is shared among many devices and applications is spread spectrum. The idea behind spread spectrum is to spread the signal over a wider frequency band, so as to minimize the impact of interference from other devices. (Spread spectrum was originally designed for military use, so these "other devices" were often attempting to jam the signal.) For example, frequency hopping is a spread spectrum technique that involves transmitting the signal over a random sequence of frequencies; that is, first transmitting at one frequency, then a second, then a third, and so on. The sequence of frequencies is not truly random but is instead computed algorithmically by a pseudorandom number generator. The receiver uses the same algorithm as the sender and initializes it with the same seed; hence, it is able to hop frequencies in sync with the transmitter to correctly receive the frame. This scheme reduces interference by making it unlikely that two signals would be using the same frequency for more than the infrequent isolated bit.
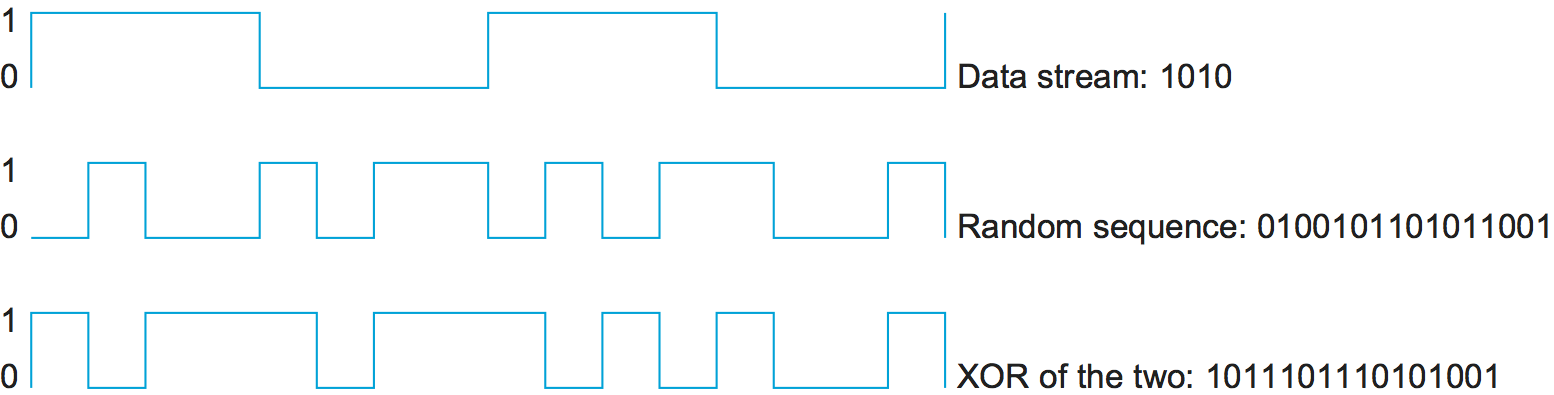
A second spread spectrum technique, called direct sequence, adds redundancy for greater tolerance of interference. Each bit of data is represented by multiple bits in the transmitted signal so that, if some of the transmitted bits are damaged by interference, there is usually enough redundancy to recover the original bit. For each bit the sender wants to transmit, it actually sends the exclusive-OR of that bit and n random bits. As with frequency hopping, the sequence of random bits is generated by a pseudorandom number generator known to both the sender and the receiver. The transmitted values, known as an n-bit chipping code, spread the signal across a frequency band that is n times wider than the frame would have otherwise required. Figure 1 gives an example of a 4-bit chipping sequence.
Different parts of the electromagnetic spectrum have different properties, making some better suited to communication, and some less so. For example, some can penetrate buildings and some cannot. Governments regulate only the prime communication portion: the radio and microwave ranges. As demand for prime spectrum increases, there is great interest in the spectrum that is becoming available as analog television is phased out in favor of digital.
In many wireless networks today we observe that there are two different classes of endpoints. One endpoint, sometimes described as the base station, usually has no mobility but has a wired (or at least high-bandwidth) connection to the Internet or other networks, as shown in Figure 2. The node at the other end of the link—shown here as a client node—is often mobile and relies on its link to the base station for all of its communication with other nodes.
Observe that in Figure 2 we have used a wavy pair of lines to represent the wireless "link" abstraction provided between two devices (e.g., between a base station and one of its client nodes). One of the interesting aspects of wireless communication is that it naturally supports point-to-multipoint communication, because radio waves sent by one device can be simultaneously received by many devices. However, it is often useful to create a point-to-point link abstraction for higher layer protocols, and we will see examples of how this works later in this section.
Note that in Figure 2 communication between non-base (client) nodes is routed via the base station. This is in spite of the fact that radio waves emitted by one client node may well be received by other client nodes—the common base station model does not permit direct communication between the client nodes.

This topology implies three qualitatively different levels of mobility. The first level is no mobility, such as when a receiver must be in a fixed location to receive a directional transmission from the base station. The second level is mobility within the range of a base, as is the case with Bluetooth. The third level is mobility between bases, as is the case with cell phones and Wi-Fi.
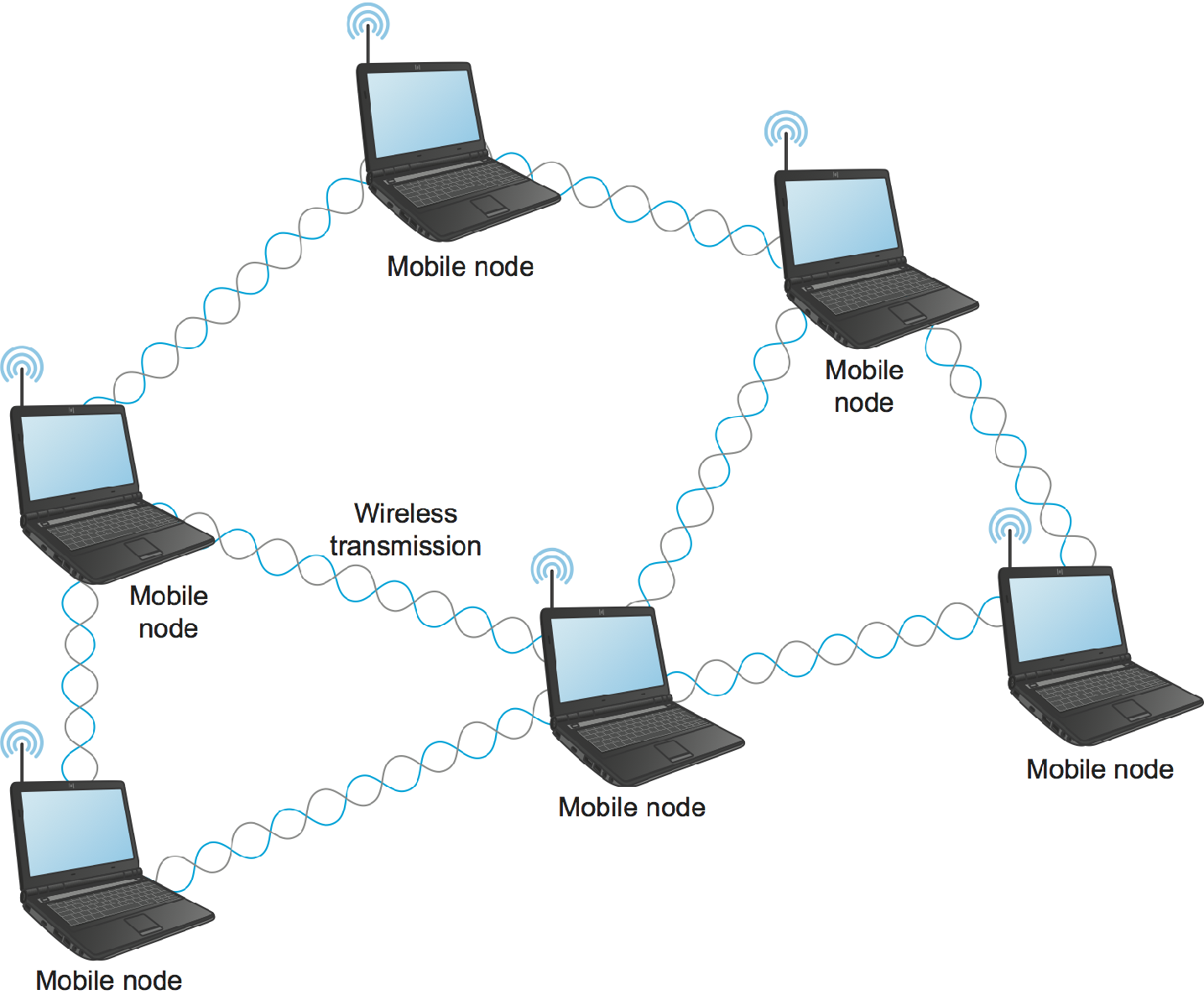
An alternative topology that is seeing increasing interest is the mesh or ad hoc network. In a wireless mesh, nodes are peers; that is, there is no special base station node. Messages may be forwarded via a chain of peer nodes as long as each node is within range of the preceding node. This is illustrated in Figure 3. This allows the wireless portion of a network to extend beyond the limited range of a single radio. From the point of view of competition between technologies, this allows a shorter-range technology to extend its range and potentially compete with a longer-range technology. Meshes also offer fault tolerance by providing multiple routes for a message to get from point A to point B. A mesh network can be extended incrementally, with incremental costs. On the other hand, a mesh network requires non-base nodes to have a certain level of sophistication in their hardware and software, potentially increasing per-unit costs and power consumption, a critical consideration for battery-powered devices. Wireless mesh networks are of considerable research interest, but they are still in their relative infancy compared to networks with base stations. Wireless sensor networks, another hot emerging technology, often form wireless meshes.
Now that we have covered some of the common wireless issues, let's take a look at the details of two common wireless technologies.
802.11/Wi-Fi
Most readers will have used a wireless network based on the IEEE 802.11 standards, often referred to as Wi-Fi. Wi-Fi is technically a trademark, owned by a trade group called the Wi-Fi Alliance, which certifies product compliance with 802.11. Like Ethernet, 802.11 is designed for use in a limited geographical area (homes, office buildings, campuses), and its primary challenge is to mediate access to a shared communication medium—in this case, signals propagating through space.
Physical Properties
802.11 defines a number of different physical layers that operate in various frequency bands and provide a range of different data rates. At the time of writing, 802.11n provides the highest maximum data rate, topping out at 600 Mbps.
The original 802.11 standard defined two radio-based physical layers standards, one using frequency hopping (over 79 1-MHz-wide frequency bandwidths) and the other using direct sequence spread spectrum (with an 11-bit chipping sequence). Both provided data rates in the 2 Mbps range. The physical layer standard 802.11b was added subsequently. Using a variant of direct sequence, 802.11b provides up to 11 Mbps. These three standards all operated in the license-exempt 2.4-GHz frequency band of the electromagnetic spectrum. Then came 802.11a, which delivers up to 54 Mbps using a variant of FDM called orthogonal frequency division multiplexing (OFDM); 802.11a runs in the license-exempt 5-GHz band. On one hand, this band is less used, so there is less interference. On the other hand, there is more absorption of the signal and it is limited to almost line of sight. 802.11g followed; 802.11g also uses OFDM, delivers up to 54 Mbps, and is backward compatible with 802.11b (and returns to the 2.4-GHz band).
Most recently 802.11n has appeared on the scene, with a standard that was approved in 2009 (although pre-standard products also existed). 802.11n achieves considerable advances in maximum possible data rate using multiple antennas and allowing greater wireless channel bandwidths. The use of multiple antennas is often called MIMO for multiple-input, multiple-output.
It is common for commercial products to support more than one flavor of 802.11; some base stations support all four variants (a,b, g, and n). This not only ensures compatibility with any device that supports any one of the standards but also makes it possible for two such products to choose the highest bandwidth option for a particular environment.
It is worth noting that while all the 802.11 standards define a maximum bit rate that can be supported, they mostly support lower bit rates as well; for example, 802.11a allows for bit rates of 6, 9, 12, 18, 24, 36, 48, and 54 Mbps. At lower bit rates, it is easier to decode transmitted signals in the presence of noise. Different modulation schemes are used to achieve the various bit rates; in addition, the amount of redundant information in the form of error-correcting codes is varied. More redundant information means higher resilience to bit errors at the cost of lowering the effective data rate (since more of the transmitted bits are redundant).
The systems try to pick an optimal bit rate based on the noise environment in which they find themselves; the algorithms for bit rate selection can be quite complex. Interestingly, the 802.11 standards do not specify a particular approach but leave the algorithms to the various vendors. The basic approach to picking a bit rate is to estimate the bit error rate either by directly measuring the signal-to-noise ratio (SNR) at the physical layer or by estimating the SNR by measuring how often packets are successfully transmitted and acknowledged. In some approaches, a sender will occasionally probe a higher bit rate by sending one or more packets at that rate to see if it succeeds.
Collision Avoidance
At first glance, it might seem that a wireless protocol would follow the same algorithm as the Ethernet—wait until the link becomes idle before transmitting and back off should a collision occur—and, to a first approximation, this is what 802.11 does. The additional complication for wireless is that, while a node on an Ethernet receives every other node's transmissions and can transmit and receive at the same time, neither of these conditions holds for wireless nodes. This makes detection of collisions rather more complex. The reason why wireless nodes cannot usually transmit and receive at the same time (on the same frequency) is that the power generated by the transmitter is much higher than any received is likely to be and so swamps the receiving circuitry. The reason why a node may not receive transmissions from another node is because that node may be too far away or blocked by an obstacle. This situation is a bit more complex than it first appears, as the following discussion will illustrate.

Consider the situation depicted in Figure 4, where A and C are both within range of B but not each other. Suppose both A and C want to communicate with B and so they each send it a frame. A and C are unaware of each other since their signals do not carry that far. These two frames collide with each other at B, but unlike an Ethernet, neither A nor C is aware of this collision. A and C are said to be hidden nodes with respect to each other.

A related problem, called the exposed node problem, occurs under the circumstances illustrated in Figure 5, where each of the four nodes is able to send and receive signals that reach just the nodes to its immediate left and right. For example, B can exchange frames with A and C but it cannot reach D, while C can reach B and D but not A. Suppose B is sending to A. Node C is aware of this communication because it hears B's transmission. It would be a mistake, however, for C to conclude that it cannot transmit to anyone just because it can hear B's transmission. For example, suppose C wants to transmit to node D. This is not a problem since C's transmission to D will not interfere with A's ability to receive from B. (It would interfere with A sending to B, but B is transmitting in our example.)
802.11 addresses these problems by using CSMA/CA, where the CA stands for collision avoidance, in contrast to the collision detection of CSMA/CD used on Ethernets. There are a few pieces to make this work.
The Carrier Sense part seems simple enough: Before sending a packet, the transmitter checks if it can hear any other transmissions; if not, it sends. However, because of the hidden node problem, just waiting for the absence of signals from other transmitters does not guarantee that a collision will not occur from the perspective of the receiver. For this reason, one part of CSMA/CA is an explicit ACK from the receiver to the sender. If the packet was successfully decoded and passed its CRC at the receiver, the receiver sends an ACK back to the sender.
Note that if a collision does occur, it will render the entire packet useless. For this reason, 802.11 adds an optional mechanism called RTS-CTS (Ready to Send-Clear to Send). This goes some way toward addressing the hidden node problem. The sender sends an RTS—a short packet—to the intended receiver, and if that packet is received successfully the receiver responds with another short packet, the CTS. Even though the RTS may not have been heard by a hidden node, the CTS probably will be. This effectively tells the nodes within range of the receiver that they should not send anything for a while—the amount of time of the intended transmission is included in the RTS and CTS packets. After that time plus a small interval has passed, the carrier can be assumed to be available again, and another node is free to try to send.
Of course, two nodes might detect an idle link and try to transmit an RTS frame at the same time, causing their RTS frames to collide with each other. The senders realize the collision has happened when they do not receive the CTS frame after a period of time, in which case they each wait a random amount of time before trying again. The amount of time a given node delays is defined by an exponential backoff algorithm very much like that used on the Ethernet.
After a successful RTS-CTS exchange, the sender sends its data packet and, if all goes well, receives an ACK for that packet. In the absence of a timely ACK, the sender will try again to request usage of the channel again, using the same process described above. By this time, of course, other nodes may again be trying to get access to the channel as well.
Distribution System
As described so far, 802.11 would be suitable for a network with a mesh (ad hoc) topology, and development of an 802.11s standard for mesh networks is nearing completion. At the current time, however, nearly all 802.11 networks use a base-station-oriented topology.
Instead of all nodes being created equal, some nodes are allowed to roam (e.g., your laptop) and some are connected to a wired network infrastructure. 802.11 calls these base stations access points (APs), and they are connected to each other by a so-called distribution system. Figure 6 illustrates a distribution system that connects three access points, each of which services the nodes in some region. Each access point operates on some channel in the appropriate frequency range, and each AP will typically be on a different channel than its neighbors.

The details of the distribution system are not important to this discussion—it could be an Ethernet, for example. The only important point is that the distribution network operates at the link layer, the same protocol layer as the wireless links. In other words, it does not depend on any higher-level protocols (such as the network layer).
Although two nodes can communicate directly with each other if they are within reach of each other, the idea behind this configuration is that each node associates itself with one access point. For node A to communicate with node E, for example, A first sends a frame to its access point (AP-1), which forwards the frame across the distribution system to AP-3, which finally transmits the frame to E. How AP-1 knew to forward the message to AP-3 is beyond the scope of 802.11; it may have used a bridging protocol. What 802.11 does specify is how nodes select their access points and, more interestingly, how this algorithm works in light of nodes moving from one cell to another.
The technique for selecting an AP is called scanning and involves the following four steps:
The node sends a
Probeframe.All APs within reach reply with a
Probe Responseframe.The node selects one of the access points and sends that AP an
Association Requestframe.The AP replies with an
Association Responseframe.
A node engages this protocol whenever it joins the network, as well as when it becomes unhappy with its current AP. This might happen, for example, because the signal from its current AP has weakened due to the node moving away from it. Whenever a node acquires a new AP, the new AP notifies the old AP of the change (this happens in step 4) via the distribution system.

Consider the situation shown in Figure 7, where node C
moves from the cell serviced by AP-1 to the cell serviced by AP-2. As
it moves, it sends Probe frames, which eventually result in Probe
Response frames from AP-2. At some point, C prefers AP-2 over AP-1,
and so it associates itself with that access point.
The mechanism just described is called active scanning since the node
is actively searching for an access point. APs also periodically send a
Beacon frame that advertises the capabilities of the access point;
these include the transmission rates supported by the AP. This is called
passive scanning, and a node can change to this AP based on the
Beacon frame simply by sending an Association Request frame back to
the access point.
Frame Format
Most of the 802.11 frame format, which is depicted in
Figure 8, is exactly what we would expect. The
frame contains the source and destination node addresses, each of
which is 48 bits long; up to 2312 bytes of data; and a 32-bit CRC. The
Control field contains three subfields of interest (not shown): a
6-bit Type field that indicates whether the frame carries data, is
an RTS or CTS frame, or is being used by the scanning algorithm, and a
pair of 1-bit fields—called ToDS and FromDS—that are described
below.

The peculiar thing about the 802.11 frame format is that it contains
four, rather than two, addresses. How these addresses are interpreted
depends on the settings of the ToDS and FromDS bits in the frame's
Control field. This is to account for the possibility that the frame
had to be forwarded across the distribution system, which would mean
that the original sender is not necessarily the same as the most recent
transmitting node. Similar reasoning applies to the destination address.
In the simplest case, when one node is sending directly to another, both
the DS bits are 0, Addr1 identifies the target node, and Addr2
identifies the source node. In the most complex case, both DS bits are
set to 1, indicating that the message went from a wireless node onto the
distribution system, and then from the distribution system to another
wireless node. With both bits set, Addr1 identifies the ultimate
destination, Addr2 identifies the immediate sender (the one that
forwarded the frame from the distribution system to the ultimate
destination), Addr3 identifies the intermediate destination (the one
that accepted the frame from a wireless node and forwarded it across the
distribution system), and Addr4 identifies the original source. In
terms of the example given in Figure 6, Addr1
corresponds to E, Addr2 identifies AP-3, Addr3 corresponds to AP-1,
and Addr4 identifies A.
Security of Wireless Links
One of the fairly obvious problems of wireless links compared to wires or fibers is that you can't be too sure where your data has gone. You can probably figure out if it was received by the intended receiver, but there is no telling how many other receivers might have also picked up your transmission. So, if you are concerned about the privacy of your data, wireless networks present a challenge.
Even if you are not concerned about data privacy—or perhaps have taken care of it in some other way—you may be concerned about an unauthorized user injecting data into your network. If nothing else, such a user might be able to consume resources that you would prefer to consume yourself, such as the finite bandwidth between your house and your ISP.
For these reasons, wireless networks typically come with some sort of mechanism to control access to both the link itself and the transmitted data. These mechanisms are often categorized as wireless security. The widely adopted WPA2 is described in Chapter 8.
Bluetooth (802.15.1)
Bluetooth fills the niche of very short range communication between mobile phones, PDAs, notebook computers, and other personal or peripheral devices. For example, Bluetooth can be used to connect a mobile phone to a headset or a notebook computer to a keyboard. Roughly speaking, Bluetooth is a more convenient alternative to connecting two devices with a wire. In such applications, it is not necessary to provide much range or bandwidth. This means that Bluetooth radios can use quite low power transmission, since transmission power is one of the main factors affecting bandwidth and range of wireless links. This matches the target applications for Bluetooth-enabled devices—most of them are battery powered (such as the ubiquitous phone headset) and hence it is important that they not consume much power.
Bluetooth operates in the license-exempt band at 2.45 GHz. Bluetooth links have typical bandwidths around 1 to 3 Mbps and a range of about 10 m. For this reason, and because the communicating devices typically belong to one individual or group, Bluetooth is sometimes categorized as a Personal Area Network (PAN).
Bluetooth is specified by an industry consortium called the Bluetooth Special Interest Group. It specifies an entire suite of protocols, going beyond the link layer to define application protocols, which it calls profiles, for a range of applications. For example, there is a profile for synchronizing a PDA with a personal computer. Another profile gives a mobile computer access to a wired LAN in the manner of 802.11, although this was not Bluetooth's original goal. The IEEE 802.15.1 standard is based on Bluetooth but excludes the application protocols.
The basic Bluetooth network configuration, called a piconet, consists of a master device and up to seven slave devices, as shown in Figure 9. Any communication is between the master and a slave; the slaves do not communicate directly with each other. Because slaves have a simpler role, their Bluetooth hardware and software can be simpler and cheaper.

Since Bluetooth operates in an license-exempt band, it is required to use a spread spectrum technique to deal with possible interference in the band. It uses frequency-hopping with 79 channels (frequencies), using each for 625 s at a time. This provides a natural time slot for Bluetooth to use for synchronous time division multiplexing. A frame takes up 1, 3, or 5 consecutive time slots. Only the master can start to transmit in odd-numbered slots. A slave can start to transmit in an even-numbered slot—but only in response to a request from the master during the previous slot, thereby preventing any contention between the slave devices.
A slave device can be parked; that is, it is set to an inactive, low-power state. A parked device cannot communicate on the piconet; it can only be reactivated by the master. A piconet can have up to 255 parked devices in addition to its active slave devices.
In the realm of very low-power, short-range communication there are a few other technologies besides Bluetooth. One of these is ZigBee, devised by the ZigBee alliance and standardized as IEEE 802.15.4. It is designed for situations where the bandwidth requirements are low and power consumption must be very low to give very long battery life. It is also intended to be simpler and cheaper than Bluetooth, making it feasible to incorporate in cheaper devices such as sensors. Sensors are becoming an increasingly important class of networked device, as technology advances to the point where very cheap small devices can be deployed in large quantities to monitor things like temperature, humidity, and energy consumption in a building.