
9.7: Ideal Impulse Response of Underdamped Second Order Systems
- Page ID
- 8343

For impulse response, we set the ICs to zero, and we define the input to be an ideal impulse at time \(t = 0\), with impulse magnitude \(I_{U}\): \(u(t)=I_{U} \delta(t)\). The more appropriate form of the general solution to use is Equation 9.3.9, which becomes
\[x(t)=\frac{\omega_{n}^{2}}{\omega_{d}} \int_{\tau=0}^{\tau=t} e^{-\zeta \omega_{n}(t-\tau)} \sin \omega_{d}(t-\tau) \times u(\tau) d \tau=\frac{\omega_{n}^{2}}{\omega_{d}} \int_{\tau=0}^{\tau=t} e^{-\zeta \omega_{n}(t-\tau)} \sin \omega_{d}(t-\tau) \times I_{U} \delta(\tau) d \tau \nonumber \]
Using the integration property of \(\delta(\tau)\), Equation 8.4.4, we find the relatively simple result:
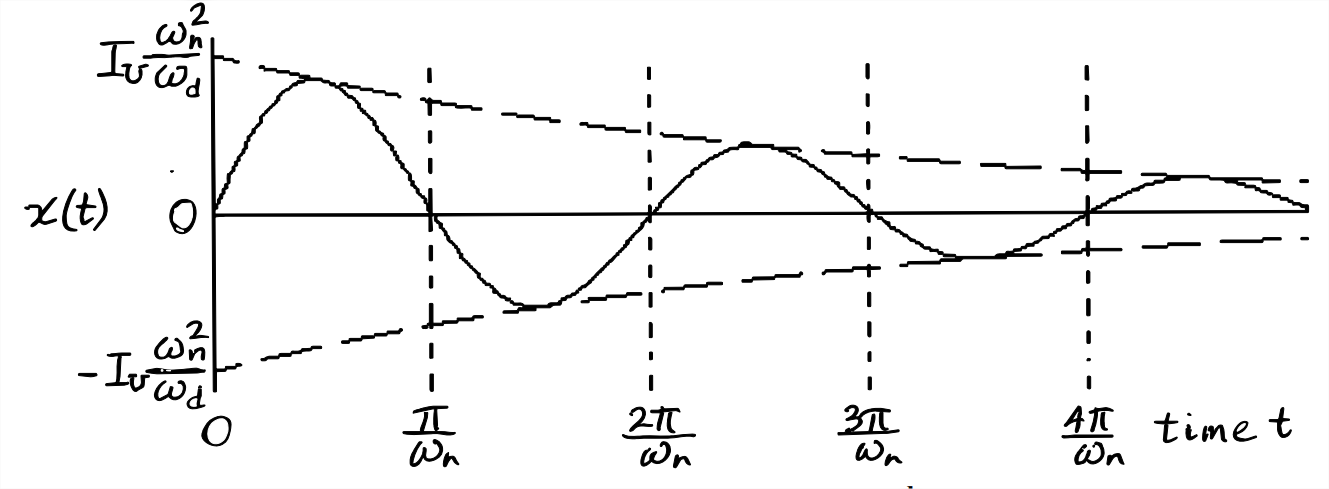
\[x(t)=I_{U} \frac{\omega_{n}^{2}}{\omega_{d}} e^{-\zeta \omega_{n} t} \sin \omega_{d} t, \text { for } 0<t \text { and } 0 \leq \zeta<1\label{eqn:9.30} \]
Ideal impulse response Equation \(\ref{eqn:9.30}\) for small damping ratio \(\zeta= 0.11\) is plotted over a few cycles of response on Figure \(\PageIndex{1}\). Observe that this ideal response violates the specified initial condition \(\dot{x}(0)=0\); thus, the solution is defective in this respect, as is discussed in Section 8.7. Figure \(\PageIndex{1}\) shows the exponential envelope; note, in particular, the values at \(t = 0\) of the exponential envelope, \(\pm I_{U} \omega_{n}^{2} / \omega_{d}\). This magnitude is easily measurable from a graph, after we have sketched in the exponential envelope, if necessary, and it is essential in the process of estimating mechanical system parameters from an experimental response to a short force pulse (Section 9.9).
From Equation Equation \(\ref{eqn:9.30}\), we find the unit-impulse-response function (IRF, as defined in Section 8.7) for underdamped 2nd order systems:
\[\left.h(t) \equiv x(t)\right|_{I_{U}=1}=\frac{\omega_{n}^{2}}{\omega_{d}} e^{-\zeta \omega_{n} t} \sin \omega_{d} t, \text { for } 0<t \text { and } 0 \leq \zeta<1\label{eqn:9.31} \]
Further, from Equation 8.7.2, we find the Duhamel integral giving general response to input \(u(t)\), with zero ICs, for underdamped 2nd order systems:
\[\left.x(t)\right|_{I C s=0}=\int_{\tau=0}^{\tau=t} u(\tau) h(t-\tau) d \tau=\frac{\omega_{n}^{2}}{\omega_{d}} \int_{\tau=0}^{\tau=t} u(\tau) e^{-\zeta \omega_{n}(t-\tau)} \sin \omega_{d}(t-\tau) d \tau\label{eqn:9.32} \]
Duhamel integral Equation \(\ref{eqn:9.32}\) is identical to convolution-integral response solution Equation 9.3.9 with zero ICs.
Finally, it is worthy of mention that convolution sum Equation 8.11.4 for approximate numerical forced response applies just as well to damped 2nd order systems as to 1st order and undamped 2nd order systems. Therefore, to calculate approximate forced response of an underdamped 2nd order system, we would apply exactly the same procedure described in Convolution-sum Example 2 of Section 8.11, but instead of calculating in Equation 8.11.4 the IRF \(h(t)=\omega_{n} \sin \omega_{n} t\) for an undamped system, we would calculate Equation \(\ref{eqn:9.31}\).