17.1: Introduction
- Page ID
- 31029

An automated guided vehicle (AGV) system can transport material between a finite number of pre-defined locations at work stations with little or no human assistance. Barrett Electronics Corporation invented the world's first AGV for industrial applications in 1954. In the United States there have been over 3,000 AGV systems installed during the last 50 years. These systems range from one vehicle to well over 100 vehicles.
An AGV system consists of vehicles that move along predetermined paths to move loads between workstations and storage areas. Vehicles operate without the need for an onboard operator or driver, pick up loads at designated pick-up points and transport them to designated drop-off points. Each workstation has a pick-up point and a drop-off point. These two points can be the same.
There are several major categories of vehicles:
- Tow Type vehicles that pull carts, trailers, dollies and the like.
- Self-contained Unit Load Type vehicles that carry products on their built-in load decks.
- Fork Type vehicles that utilize a fork/mast lift mechanism for interfacing with loads at various elevations.
- Smaller Commercial/Office Type vehicles that have capacities of less than 500 pounds.
- Heavy Carrier Type vehicles designed to transport large or very heavy loads such as
dies, rolls, coils, ingots weighing in excess of 250,000 pounds.
Vehicles move between work stations by traversing control segments. Each control segment is relatively short. The intersection point between control segments is a control point. Pickup and dropoff points are control points as well.
Vehicles in most existing systems follow an inductive guide path consisting of a wire embedded in the floor carrying alternating current that induces a magnetic field detected by antenna mounted on the bottom of the vehicles. Other control mechanisms include surface mounted magnetic or optical strips as well as inertial or laser guidance. Vehicles have controllers that respond to instructions and ensure safety.
AGV systems must be able to perform routing, traffic control and communications functions. Routing is the method by which an AGV determines how to go from its current location to a designated destination. Different approaches to routing logic can be implemented such as shortest time, shortest distance and fixed pattern. Traffic control assures that AGVs do not collide with each other. Either fixed or variable distances between vehicles can be used.
Communication is needed between vehicles, between a vehicle and a central device or for local interfaces. The communication mechanism provides the means by which vehicles are informed of routing and traffic control decisions.
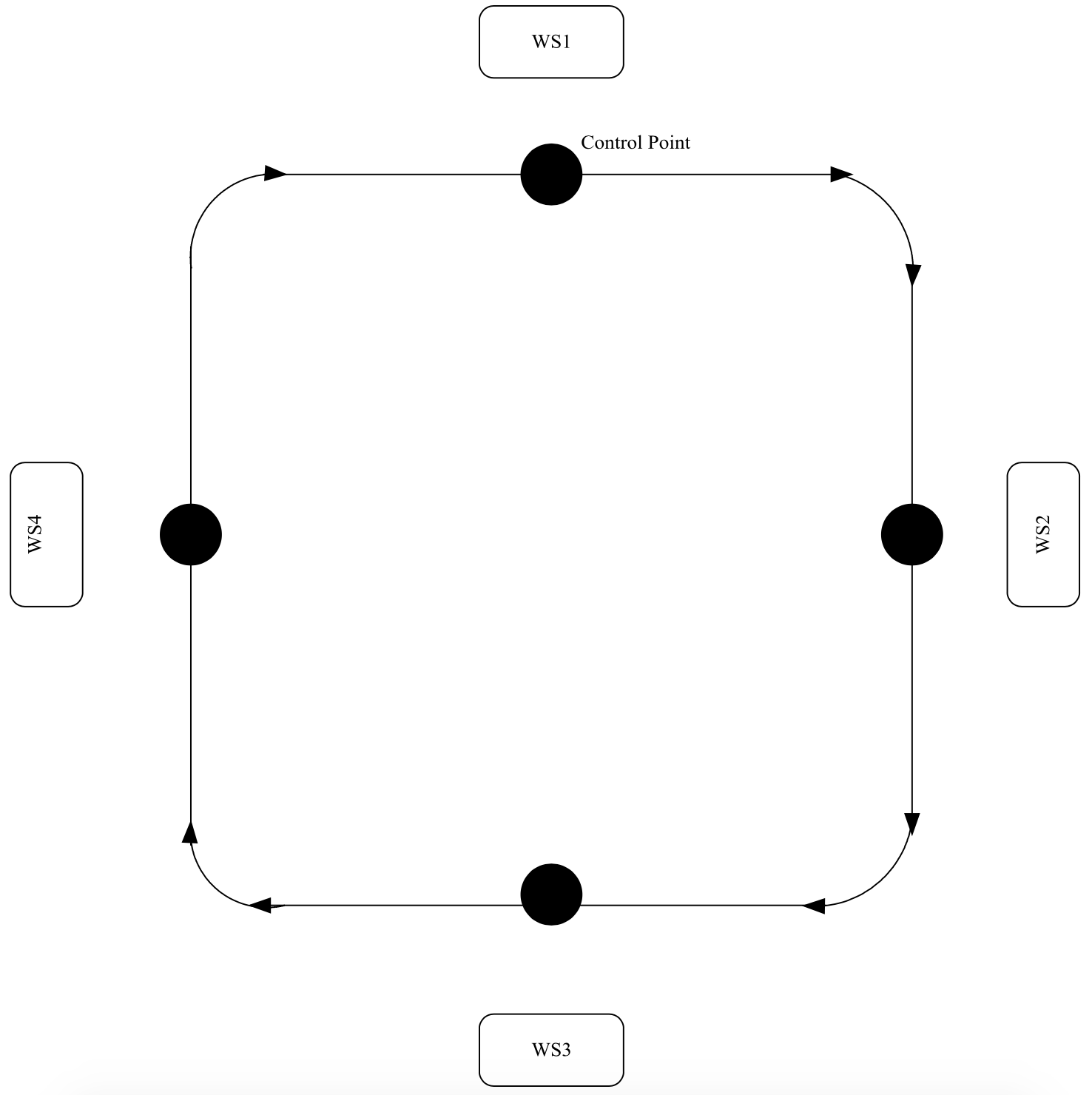
A simple AGV system is shown in Figure 17-1. There are four control segments that form a loop in the shape a rectangle with rounded corners. Rounded corners allow the AGV to continue at full speed instead of stopping to make a 90 degree turn as would be the case if square corners were used. There are four stations each with its own control point indicating the place where loads are picked up or dropped off. AGV's move in only one direction, clockwise, around the loop.
Requests come to move loads from one workstation to another. In response, an idle AGV moves from the parking area to the pickup point of the workstation where the load currently resides. The AGV moves from this pickup point to the drop off point of the destination workstation. After unloading, the AGV remains idle at the dropoff point.
Figure 17-1: Simple AGVS Layout