
5.0: Prelude to Control System Design with Root Locus
- Page ID
- 24458

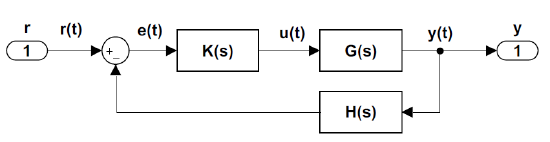
The typical structure of a feedback control system (Figure 5.0.1) includes the process to be controlled, represented by \(G(s)\), a sensor that measures the output, represented by \(H\left(s\right)\), and a cascade controller, represented by \(K(s)\). The plant is assumed to be of single-input single-output (SISO) type.
Assuming a static gain controller is selected, the characteristic polynomial includes the controller gain, \(K\), as a parameter. The root locus (RL) refers to the locus of the closed-loop roots as the controller gain, \(K\), varies from \(0\to \infty\). The root locus technique allows graphical representation of achievable closed-loop pole locations.
The RL plot in the case of low-order plant models can be sketched by hand following a set of rules; a computer generated plot can be obtained from MATLAB. The controller gain needed to achieve a set of design specifications can be selected from the RL plot. In MATLAB, the controller gain can be read by clicking on the RL plot.
The feedback control system is designed for closed-loop stability and the desired transient and/or steady-state response improvements. The transient response improvements are measured in terms of step response parameters (\(t_r,\ t_s,\ \%OS,\) etc.); the steady-state response improvements are measured in terms of relevant error constants (\(K_p,\ K_v\)).
The root locus plot of a given loop transfer function, \(KGH(s)\), constitutes \(n\) branches in the complex \(s\)-plane, where \(n\) is the order of the denominator polynomial. These branches commence at the open-loop (OL) poles and proceed towards finite zeros of the loop transfer function, or asymptotically toward infinity. All root locus plots bear common characteristics that are referred as root locus rules. These describe the location of real-axis locus, break points, asymptote directions, etc.
The root locus design technique can be extended to dynamic controllers of phase-lead, phase-lag, lead–lag, PD, PI, and PID types. The dynamic controller introduces poles and zeros that modify the original RL to bring about the desired design improvements. With the availability of a rate sensors (rate gyroscope and tachometer), rate feedback design that includes the design of inner and outer feedback loops may be considered.
The static and dynamic controllers designed for process improvement can be implemented with electronic circuits built with operational amplifiers, resistors, and capacitors. Alternatively, controller realization using microcontrollers can be considered. This topic is addressed in the next chapter after introduction of the sampled-data systems.