1.5: Industrial Process Models
- Page ID
- 24389

Industrial Process Models
Industrial processes comprise exchange of chemical, electrical or mechanical energy in the manufacturing of industrial products. An industrial process model in its simplified form is represented by a first-order lag with a dead-time that represents the time delay between the application of input and the appearance of the process output.
Let \(\tau\) represent the time constant associated with an industrial process, \(\tau _ d\) represent the dead-time, and \(K\) represent the process dc gain; then, simplified industrial process dynamics are represented by the following delay-differential equation:
\[\tau \frac{ dy(t)}{ dt} +y(t)=Ku(t-t_{d} ) \nonumber \]
Application of the Laplace transform produces the following first-order-plus-dead-time (FOPDT) model of an industrial process:
\[G(s)=\frac{Ke^{-\tau _ d s} }{\tau s+1} \nonumber \]
where the process parameters \(\{ K,\; \tau ,\; \tau _ d \}\), can be identified from the process response to inputs. An rational process model is obtained by using a Taylor series approximation of the delay term, \(e^{-\tau _ d s}\). Typical such approximations include:
\[ e^{-\tau_d s} \simeq 1-\tau _ d s, \ \ \ e^{-\tau _ d s} = \frac{1}{e^{\tau _d s} } \simeq \frac{1}{1+\tau _d s}, \ \ \ e^{-\tau _ds}=\frac{e^{-\tau _ds/2}}{e^{\tau _ds/2}}\simeq \frac{1-\tau _ds/2}{1+\tau_ds/2} \nonumber \]
The last expression is termed as first-order Pade’ approximation and is often preferred. Higher order approximations can also be used.
The process parameters of a stirred-tank bioreactor are given as: \(\{ K,\; \tau ,\; \tau _ d \} =\left\{20,0.5,1\right\}\). The transfer function model of the process is formed as:
\[G(s)=\frac{20e^{-s} }{0.5s+1}.\]
By using a first-order Pade’ approximation, a rational transfer function model of the industrial process with delay is obtained as:
\[G(s)=\frac{20\left(1-0.5s\right)}{\left(0.5s+1\right)^{2} }.\]
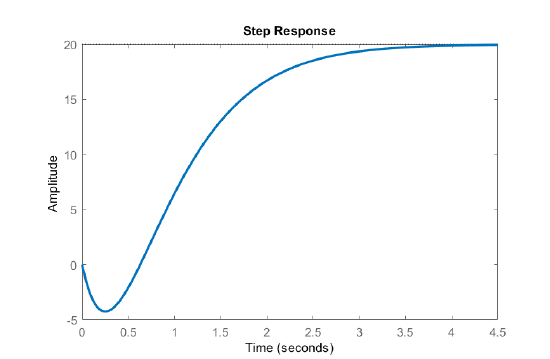
The step response of the bioreactor transfer function with Pade’ approximation shows an undershoot due to the presence of right half-plane (RHP) zero in the transfer function.