
6.4: Discussion and Exercises
- Page ID
- 47914
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)The running times of the depth-first-search and breadth-first-search algorithms are somewhat overstated by the Theorems 6.3.1 and 6.3.2. Define \(\mathtt{n}_{\mathtt{r}}\) as the number of vertices, \(\mathtt{i}\), of \(G\), for which there exists a path from \(\mathtt{r}\) to \(\mathtt{i}\). Define \(\mathtt{m}_\mathtt{r}\) as the number of edges that have these vertices as their sources. Then the following theorem is a more precise statement of the running times of the breadth-first-search and depth-first-search algorithms. (This more refined statement of the running time is useful in some of the applications of these algorithms outlined in the exercises.)
When given as input a Graph, \(\mathtt{g}\), that is implemented using the AdjacencyLists data structure, the \(\mathtt{bfs(g,r)}\), \(\mathtt{dfs(g,r)}\) and \(\mathtt{dfs2(g,r)}\) algorithms each run in \(O(\mathtt{n}_{\mathtt{r}}+\mathtt{m}_{\mathtt{r}})\) time.
Breadth-first search seems to have been discovered independently by Moore [52] and Lee [49] in the contexts of maze exploration and circuit routing, respectively.
Adjacency-list representations of graphs were presented by Hopcroft and Tarjan [40] as an alternative to the (then more common) adjacency-matrix representation. This representation, as well as depth-first-search, played a major part in the celebrated Hopcroft-Tarjan planarity testing algorithm that can determine, in \(O(\mathtt{n})\) time, if a graph can be drawn, in the plane, and in such a way that no pair of edges cross each other [41].
In the following exercises, an undirected graph is one in which, for every \(\mathtt{i}\) and \(\mathtt{j}\), the edge \((\mathtt{i},\mathtt{j})\) is present if and only if the edge \((\mathtt{j},\mathtt{i})\) is present.
Exercise \(\PageIndex{1}\)
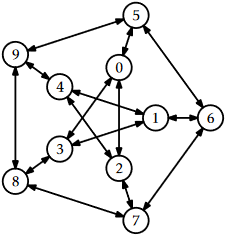
Draw an adjacency list representation and an adjacency matrix representation of the graph in Figure \(\PageIndex{1}\).
Exercise \(\PageIndex{2}\)
The incidence matrix representation of a graph, \(G\), is an \(\mathtt{n}\times\mathtt{m}\) matrix, \(A\), where
\[\displaystyle A_{i,j} =
\begin{cases}
-1 & \text{if vertex $i$ the source of edge $j$} \\
+1 & \text{if vertex $i$ the target of edge $j$} \\
0 & \text{otherwise.}
\end{cases}\nonumber\]
- Draw the incident matrix representation of the graph in Figure \(\PageIndex{1}\).
- Design, analyze and implement an incidence matrix representation of a graph. Be sure to analyze the space, the cost of \(\mathtt{addEdge(i,j)}\), \(\mathtt{removeEdge(i,j)}\), \(\mathtt{hasEdge(i,j)}\), \(\mathtt{inEdges(i)}\), and \(\mathtt{outEdges(i)}\).
Exercise \(\PageIndex{3}\)
Illustrate an execution of the \(\mathtt{bfs(G,0)}\) and \(\mathtt{dfs(G,0)}\) on the graph, \(\mathtt{G}\), in Figure \(\PageIndex{1}\).
Exercise \(\PageIndex{4}\)
Let \(G\) be an undirected graph. We say \(G\) is connected if, for every pair of vertices \(\mathtt{i}\) and \(\mathtt{j}\) in \(G\), there is a path from \(\mathtt{i}\) to \(\mathtt{j}\) (since \(G\) is undirected, there is also a path from \(\mathtt{j}\) to \(\mathtt{i}\)). Show how to test if \(G\) is connected in \(O(\mathtt{n}+\mathtt{m})\) time.
Exercise \(\PageIndex{5}\)
Let \(G\) be an undirected graph. A connected-component labelling of \(G\) partitions the vertices of \(G\) into maximal sets, each of which forms a connected subgraph. Show how to compute a connected component labelling of \(G\) in \(O(\mathtt{n}+\mathtt{m})\) time.
Exercise \(\PageIndex{6}\)
Let \(G\) be an undirected graph. A spanning forest of \(G\) is a collection of trees, one per component, whose edges are edges of \(G\) and whose vertices contain all vertices of \(G\). Show how to compute a spanning forest of of \(G\) in \(O(\mathtt{n}+\mathtt{m})\) time.
Exercise \(\PageIndex{7}\)
We say that a graph \(G\) is strongly-connected if, for every pair of vertices \(\mathtt{i}\) and \(\mathtt{j}\) in \(G\), there is a path from \(\mathtt{i}\) to \(\mathtt{j}\). Show how to test if \(G\) is strongly-connected in \(O(\mathtt{n}+\mathtt{m})\) time.
Exercise \(\PageIndex{8}\)
Given a graph \(G=(V,E)\) and some special vertex \(\mathtt{r}\in V\), show how to compute the length of the shortest path from \(\mathtt{r}\) to \(\mathtt{i}\) for every vertex \(\mathtt{i}\in V\).
Exercise \(\PageIndex{9}\)
Give a (simple) example where the \(\mathtt{dfs(g,r)}\) code visits the nodes of a graph in an order that is different from that of the \(\mathtt{dfs2(g,r)}\) code. Write a version of \(\mathtt{dfs2(g,r)}\) that always visits nodes in exactly the same order as \(\mathtt{dfs(g,r)}\). (Hint: Just start tracing the execution of each algorithm on some graph where \(\mathtt{r}\) is the source of more than 1 edge.)
Exercise \(\PageIndex{10}\)
A universal sink in a graph \(G\) is a vertex that is the target of \(\mathtt{n}-1\) edges and the source of no edges.1 Design and implement an algorithm that tests if a graph \(G\), represented as an AdjacencyMatrix, has a universal sink. Your algorithm should run in \(O(\mathtt{n})\) time.