
6.3: Castigliano’s second theorem and statically indeterminate structures
- Page ID
- 95307
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
6.4 Castigliano’s second theorem and statically indeterminate structures
A statically indeterminate structure is one in which the number of unknown forces exceeds the number of independent equations of static equilibrium. The excess forces are called redundants. By removing supports and/or members in a statically indeterminate structure equal to the number of redundants, a stable statically base structure can be obtained. To determine the redundants, we can imposed displacement compatibility using Castigliano’s second theorem. A stable statically determinate base structure is capable of resisting the external loads. Removing a support reaction or a member in statically determinate structure renders it unstable—it is not capable of resisting external loads and it is classified as moving mechanical system (i.e., either a mechanism or linkage).
Consider a coplanar truss which consists of straight bars connected by smooth hinge joints with the external loads applied only to the joints. As discussed in example 6.3 on page 148, a truss is statically determinate if  and statically indeterminate if
and statically indeterminate if  , where m denotes the number of bars or members, j the number of joints, and r denotes the number of reaction forces at the supports. Even statically determinate trusses can be unstable if the members are not arranged properly. Statical determinacy is a necessary condition for stability, not a sufficient condition. Each truss must be examined individually to determine stability. For the truss shown in part (a) of figure 6.17, m = 9, r = 4, and j = 6, so it is statically indeterminate. If the upper left support is removed and replaced with a horizontal force Q, then a statically determinate base structure results as shown in part (b) of figure 6.17. The force Q is the redundant and it is treated as an external load on the base structure. Equilibrium of the base structure determines the internal bar forces in terms of external forces P and Q. The solution to the truss in part (a) is effected by imposing the displacement corresponding to force Q to vanish via Castigliano’s second theorem (i.e.,
, where m denotes the number of bars or members, j the number of joints, and r denotes the number of reaction forces at the supports. Even statically determinate trusses can be unstable if the members are not arranged properly. Statical determinacy is a necessary condition for stability, not a sufficient condition. Each truss must be examined individually to determine stability. For the truss shown in part (a) of figure 6.17, m = 9, r = 4, and j = 6, so it is statically indeterminate. If the upper left support is removed and replaced with a horizontal force Q, then a statically determinate base structure results as shown in part (b) of figure 6.17. The force Q is the redundant and it is treated as an external load on the base structure. Equilibrium of the base structure determines the internal bar forces in terms of external forces P and Q. The solution to the truss in part (a) is effected by imposing the displacement corresponding to force Q to vanish via Castigliano’s second theorem (i.e.,  ). This displacement compatibility condition determines the redundant Q.
). This displacement compatibility condition determines the redundant Q.
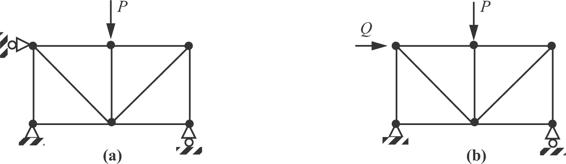
Fig. 6.17 A singly redundant truss (a), and its stable statically determinate base structure (b).
Example 6.8 Statically indeterminate truss
Consider the truss shown in part (a) of figure 6.18. The horizontal bars and the vertical bars have a length denoted by L, and each bar has the same elastic modulus E and same cross-sectional area A. For this truss m = 6, r = 3, and j = 4. So the truss is statically indeterminate. Note that this truss is statically determinate externally, but is statically indeterminate internally. Determine the bar forces in terms of the external applied load P.
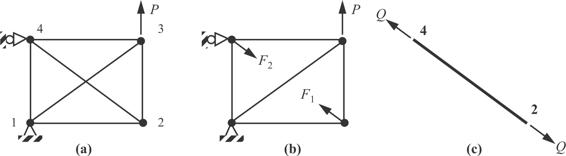
Fig. 6.18 (a) Statically indeterminate truss. (b) Statically determinant base structure with bar 2-4 replaced by forces F1 and F2. (c) Bar 2-4 subject to equal and opposite forces.
Solution. Consider a statically determinate truss with bar 2-4 removed, and a force F1 acting at joint 2 and a force F2 acting at joint 4 as shown in figure 6.18(b). These forces are oppositely directed along a line action coinciding with the removed bar 2-4. Let the complementary strain energy for this statically determinate, five-bar truss be denoted by Û*. We employ Castigliano’s second theorem to determine the displacement u1 corresponding to force F1 and displacement u2 corresponding to F2. That is,

The bar forces are determined by joint equilibrium, and the results are shown in table 6.6. Bar forces are assumed positive in tension.
Table 6.6 Terms in eq. (a) for Castigliano’s second theorem
|
|
||||||
|---|---|---|---|---|---|---|
|
Bar |
Length L |
Axial force N |
∂N∕∂F1 |
|
|
|
|
1-2 |
L |
|
|
LF1∕2 |
0 |
LQ∕2 |
|
1-3 |
|
|
1 |
|
0 |
|
|
1-4 |
L |
|
0 |
0 |
(LF2)∕2 |
(LQ)∕2 |
|
2-3 |
L |
|
|
LF1∕2 |
0 |
LQ∕2 |
|
3-4 |
L |
|
|
|
0 |
|














The sum of elements in column five divided by the product EA determines displacement u1, and the sum of column six divided by EA determines u2. Simplifying the results leads to

The relative inward displacement between joints 2 and joint 4 is given by the sum u1 + u2. For equal and opposite forces we set  , and then the relative inward displacement reduces to
, and then the relative inward displacement reduces to

The seventh column in the table is obtained by setting  . The sum of elements in the seventh column divided by EA is derivative of Û* with respect to Q; i.e.,
. The sum of elements in the seventh column divided by EA is derivative of Û* with respect to Q; i.e.,

We conclude that the relative inward displacement between joints 2 and joint 4 is given by

The elongation of bar 2-4 is denoted by Δ24 and its complementary strain energy is denoted by  . Hooke’s law for bar 2-4 is given by eq. (6.2) on page 144, which for N→Q and
. Hooke’s law for bar 2-4 is given by eq. (6.2) on page 144, which for N→Q and  is solved for its elongation. The complementary strain energy is given by eq. (5.84) on page 136. These relations are
is solved for its elongation. The complementary strain energy is given by eq. (5.84) on page 136. These relations are

Castigliano’s second theorem is  , which is equal to the elongation. Thus,
, which is equal to the elongation. Thus,  .
.
Geometric compatibility of the statically indeterminate, six-bar truss requires the relative inward displacement between joints 2 and 4 equals the negative of the elongation of bar 2-4. In other words, the sum  . Hence,
. Hence,

where the total complementary strain energy of the statically indeterminate six-bar truss is  . Hence, Castigliano’s second theorem applied to the six-bar truss is
. Hence, Castigliano’s second theorem applied to the six-bar truss is

From eq. (h) we determine the redundant as

Finally, the bar forces are

The condition that  is interpreted as the relative displacement between the faces of an imaginary cut in bar 2-4 is equal to zero.
is interpreted as the relative displacement between the faces of an imaginary cut in bar 2-4 is equal to zero.
■
If the solution of the truss in example 6.8 was undertaken using Castigliano’s first theorem, it would lead to five simultaneous linear equations for the unknown joint displacements  , and, q8 in terms of the applied load P. (Refer to “Coplanar trusses” on page 143 for the displacement numbering convention.) After solving for these simultaneous equations for the joints displacements, the elongations of each bar, Δi − j, would be computed from eq. (6.6) on page 145. Lastly, the bar forces are determined from
, and, q8 in terms of the applied load P. (Refer to “Coplanar trusses” on page 143 for the displacement numbering convention.) After solving for these simultaneous equations for the joints displacements, the elongations of each bar, Δi − j, would be computed from eq. (6.6) on page 145. Lastly, the bar forces are determined from  . Using Castigliano’s second theorem for this singly redundant truss, we only had to solve one equation for the unknown redundant Q. The number of simultaneous equations to be solved in a statically indeterminate structure by Castigliano’s second theorem is equal to the number of redundants.
. Using Castigliano’s second theorem for this singly redundant truss, we only had to solve one equation for the unknown redundant Q. The number of simultaneous equations to be solved in a statically indeterminate structure by Castigliano’s second theorem is equal to the number of redundants.
Example 6.9 King Post truss
In this example we paraphrase the problem statement given in the text by Bruhn (1973, p. A8.42). The structure shown in figure 6.19 consists of members ADC, AB, BC, and BD. Continuous member ADC is simply supported at ends A and C, has an area of 9.25 in2, and a second area moment of 216 in4. Members AB, BC and BD have areas of 2 in2. The modulus of elasticity is the same for all members. Determine the internal actions in each member using Castigliano’s second theorem.

Fig. 6.19 King post truss.
Solution. This structure is statically determinant externally. Also, the structure, its support conditions, and the external loading are symmetric about the vertical line of action of the 5,000 lb. force. The support reactions of the truss removed from its supports at A and C are shown in figure 6.20(a). Consideration of the free body diagrams of members AD, AB, and BD in figure 6.20(b) leads to the conclusion that this structure is statically indeterminate internally. The redundant Q is taken as the axial force in member AB. If Q is known, then the forces and moments in the other members are determined by equilibrium. Neglecting the energy due to transverse shear in member ADC, the complementary strain energy is
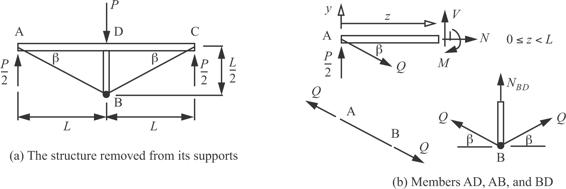
Fig. 6.20 Free body diagrams of the king post truss.

Note that the complementary strain energy in members AD and AB are multiplied by two to account for the energy in members DC and BC, respectively. The compatibility condition that the relative displacement of an imaginary cut in member AB vanishes is that the derivative of the complementary energy with respect to Q equals zero. Thus,

Equilibrium equations of member AD are

The axial equilibrium equation for member BD is

Substitute member axial forces and moment from the equilibrium eq. (c) into the compatibility condition (b) to get

Perform the integration in eq. (e) followed by the substitutions  ,
,  , and
, and  to find
to find

Solve. (f) for the redundant Q:

Substitute the numerical values for the quantities on the right-hand side of eq. (g) to find the redundant:

The axial force in member BD from eq. (d) is

The negative value of NBD means member BD is in compression. The axial force and bending moment in member AD is

■