
18.10: References
- Page ID
- 95342

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)18.10 References
- Bathe, K-L. Finite Element Procedures in Engineering Analysis. Englewood Cliffs, NJ: Prentice-Hall Inc., 1982.
- Boresi, A. P. Elasticity In Engineering Mechanics. Englewood Cliffs, N.J: Prentice-Hall, Inc. 1965, p. 34.
- Craig, Roy R., Jr. Structural Dynamics: An Introduction to Computer Methods. New York: John Wiley & Sons, Inc., 1981, pp. 212–217, 321–340, 455–464.
- Hallauer, W. L., Jr., Introduction to Linear, Time-Invariant, Dynamic Systems for Students of Engineering. Blacksburg, VA: Self-published, 2016. http://hdl.handle.net/10919/78864.
- Isakowitz, Steven J. Space Launch Systems, 2d ed. Updated by Jeff Samella.Washington DC: American Institute of Aeronautics and Astronautics, 1995, pp. 201–218.
- Langhaar, H. L. Energy Methods in Applied Mechanics. New York: John Wiley, and Sons, Inc., 1962.
- Qu, Zu-Qing. Model Order Reduction Techniques, With Application to Finite Element Analysis. London: Springer-Verlag, 2004.
- Sarafin, Thomas, P., ed. Spacecraft Structures and Mechanisms - From Concept to Launch. Torrance, CA, and Dordrecht, The Netherlands: Microcosom Press, and Kluwer, 1995, pp. 49 & 50.
- Schiesser, W. E. Computational Mathematics in Engineering and Applied Science. Boca Raton, FL: CRC Press, 1994, Chapter 2.
- Szabó, B., and I. Babuska. Finite Element Analysis. New York: John Wiley & Sons, 1991, pp. 163–166.
18.11 Practice exercises
1. The Lagrangian for a three-degree-of-freedom model of Atlas I is

where w1(t) is the displacement at the bottom of the booster, w2(t) is the displacement at the top of Centaur, and w3(t) is the displacement of the payload. These displacements are defined with respect to the equilibrium state. The combined mass of the booster and Centaur is denoted by m1, the mass of the fairing by m2, and the mass of the payload by m3. Masses are determined from the weight data given in “Description of Atlas I” on page 485. The spring stiffness k12 and k23 are listed in “Step 1: Equations of motion about equilibrium.” on page 488. Lagrange’s equations of motion are

where  . lb is the net thrust. Determine the maximum payload load factor during the initial instants of lift off. Partial answer: the value and its associated eigenvector for the smallest elastic mode is
. lb is the net thrust. Determine the maximum payload load factor during the initial instants of lift off. Partial answer: the value and its associated eigenvector for the smallest elastic mode is

The eigenvector is normalized such that the magnitude of its largest component is a positive one.
2. Determine the natural frequencies in Hz and the corresponding modal vectors for the five-bar, pin-jointed truss shown in figure 18.24. Normalize the modal vectors such that the largest component in the vector is a positive 1. Sketch the mode shapes.
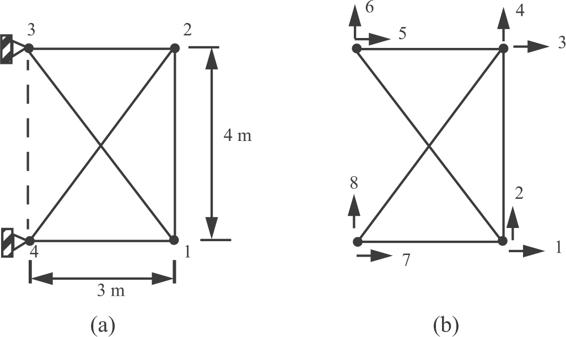
Fig. 18.24 (a) Five-bar truss, (b) Degrees of freedom.
3. The three-bar truss in example 18.3 on page 511 is subjected to the following initial conditions

a) Determine the generalized mass matrix [Mg], the generalized stiffness matrix [Kg], and the initial conditions in modal coordinates (begin with eqs. (d) and (e)).
b) Determine the solution in modal coordinates and in physical coordinates.
c) Determine the transient bar forces  .
.
d) Plot the bar forces found in part (c) for  .
.
4. Model the cantilever beam in example 18.4 on page 518 with two equal length elements as shown in figure 18.25.
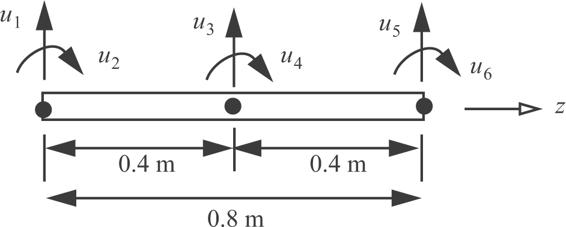
Fig. 18.25 Beam of example 18.4 modeled with two elements.
a) Determine the natural frequencies in Hz and the corresponding modal vectors. Normalize the modal vectors such that the tip displacement u5 is equal to one in each mode. Refer to table 18.4.
b) Determine the percentage error of each frequency with respect to the exact frequency from the continuous beam vibration analysis.
c) Plot the lateral displacement of the beam,  , for each mode using eq. (17.69) on page 463 and matrix [Gaq] from the last three rows of eq. (18.162).
, for each mode using eq. (17.69) on page 463 and matrix [Gaq] from the last three rows of eq. (18.162).
5. The uniform beam shown in figure 18.26 is simply supported at each end. The material and geometric properties are the same as those given in example 18.4,
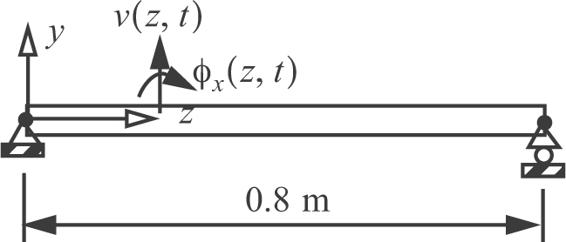
Fig. 18.26 Simply supported beam.
a. Determine the first two natural frequencies in Hz for the beam modeled with one element. Use the condensed mass matrix (18.167) and stiffness matrix (17.106) on page 468.
b. Compute the percent discrepancy of the frequencies with respect to the continuous beam solution. The frequencies for the continuous beam vibration analysis in rad/s are listed in Graig (1981) as 
 .
.
-
1. Requirements for generalized coordinates are (1) that there is a one-to-one correspondence between the coordinates and the configuration of the mechanical system, and (2) that infinitesimal increments in the generalized coordinates result in infinitesimal increments in the configuration. Requirement (1) precludes constraint equations between the generalize coordinates.