
1.3: The Mass-Damper System I - example of 1st order, linear, time-invariant (LTI) system and ordinary differential equation (ODE)
- Page ID
- 21082

Consider a rigid body of mass \(m\) that is constrained to sliding translation \(x(t)\) in only one direction, Figure \(\PageIndex{1}\). The mass is subjected to an externally applied, arbitrary force \(f_x(t)\), and it can slide on a thin, viscous liquid layer such as water or oil. The viscous force acting on the mass due to sliding on the liquid layer is opposite to the direction of velocity, \(v(t)\equiv\dot{x}(t)\), and we assume that the magnitude of viscous force is proportional to velocity with constant of proportionality \(c\), called the viscous damping constant. Mass \(m\) and viscous damping constant \(c\) are positive physical quantities. All of the forces acting on the mass are as shown on the free-body diagram (FBD) of Figure \(\PageIndex{1}\).
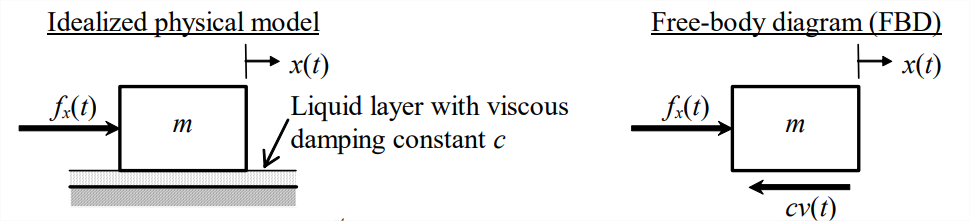
Next, we use (from your engineering dynamics course) the free-body diagram (FBD) of Figure \(\PageIndex{1}\) and Newton’s 2nd law of motion (after English physicist and mathematician Isaac Newton, 1642-1727) for translation in a single direction, to write the equation of motion for the mass:
\[\sum(\text { Forces })_{x}=\text { mass } \times(\text { acceleration })_{x} \nonumber \]
where
\[(acceleration)_{x}=\frac{d v}{d t}=\dot{v} \nonumber \]
\[f_{x}(t)-c v=m \dot{v}. \nonumber \]
As is customary in writing ODEs, we collect all terms involving the dependent variable and its derivatives on the left-hand side, and put all independent input functions on the right-hand side:
\[m \dot{v}+c v=f_{x}(t)\label{eqn:1.2} \]
ODE Equation \(\ref{eqn:1.2}\) is clearly linear in the single dependent variable, velocity \(v(t)\), and time-invariant, assuming that \(m\) and \(c\) are constants. The highest derivative of \(v(t)\) in the ODE is the first derivative, so this is called a 1st order ODE, and the mass-damper system is called a 1st order system. If \(f_x(t)\) is defined explicitly, and if we also know some initial condition (IC) of the velocity, \( v_0\equiv v(t_0) \) at time \(t\) = \(t_0\), then we can, at least in principle, solve ODE Equation \(\ref{eqn:1.2}\) for velocity \(v(t)\) at all times \(t\) > \(t_0\). (In this book, we will usually define the initial time as \(t_0\)= 0 second.)
Equation \(\ref{eqn:1.2}\) expressed in the form of the standard 1st order LTI ODE Equation 1.2.1 becomes \(\dot{v} -av=bf_x(t)\), where \(a=-c/m\) and \(b=1/m\). Since \(m\) and \(c\) are positive physical constants, \(a\) is clearly negative. This negative polarity is characteristic of most physical systems that we will study; we shall see that it has an important influence on the general nature of the transient response of systems.
Note that after solving for velocity \(v(t)\), we can solve by direct integration another ODE for position \(x(t)\), provided that we know the initial position \(x_0\equiv x(t_0)\) at time \(t\) = \(t_0\). One systematic method for finding \(x(t)\) is based upon the derivative definition:
\[\text { ODE: } \quad \dot{x}(t) \equiv \frac{d x(t)}{d t}=v(t) \nonumber \]
The following shows careful definite integration of both sides of the ODE, using \(\tau\) as the “dummy” variable of integration to distinguish it from the upper limit, time \(t\):
\[\begin{equation}\begin{aligned}
\int_{t=1}^{t=t} \frac{d x(\tau)}{d \tau} d \tau &=\int_{t=t_{0}}^{\tau=t} v(\tau) d \tau \quad \Rightarrow \quad x(t)-x\left(t_{0}\right)=\int_{\tau=t_{0}}^{\tau=t} v(\tau) d \tau \\
& \Rightarrow \quad x(t)=x_{0}+\int_{\tau=t_{0}}^{t=t} v(\tau) d \tau
\end{aligned}\label{eqn:1.3}\end{equation} \]
Another popular method of solution is to find the antiderivative (indefinite integral) of the ODE and add a constant of integration \(C\), which then must be determined in terms of the initial condition:
\[\begin{align}
x(t)=\int v(t) d t+C & \Rightarrow x\left(t_{0}\right)=\left[\int v(t) d t\right]_{t=t_{0}}+C \Rightarrow C=x_{0}-\left[\int v(t) d t\right]_{t-t_{0}} \\
& \Rightarrow x(t)=x_{0}+\int v(t) d t-\left[\int v(t) d t\right]_{t-t_{0}}
\end{align}\label{eqn:1.4} \]