
1.5: Common Discrete Time Signals
- Page ID
- 22841

Introduction
Before looking at this module, hopefully you have an idea of what a signal is and what basic classifications and properties a signal can have. In review, a signal is a function defined with respect to an independent variable. This variable is often time but could represent any number of things. Mathematically, discrete time analog signals have discrete independent variables and continuous dependent variables. This module will describe some useful discrete time analog signals.
Important Discrete Time Signals
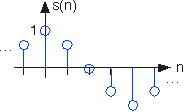
Sinusoids
One of the most important elemental signal that you will deal with is the real-valued sinusoid. In its discrete-time form, we write the general expression as
\[ A \cos (\omega n+\varphi) \nonumber \]
where \(A\) is the amplitude, \(\omega\) is the frequency, and \(\varphi\) is the phase. Because \(n\) only takes integer values, the resulting function is only periodic if \(\frac{2 \pi}{\omega}\) is a rational number.
Note that the equation representation for a discrete time sinusoid waveform is not unique.
Complex Exponentials
As important as the general sinusoid, the complex exponential function will become a critical part of your study of signals and systems. Its general discrete form is written as
\[z^n \nonumber \]
where \(z\), is a complex number. The set of complex exponentials for which \(|z|=1\) are a special class, expressed as \(e^{j\omega n}\), (where \(\omega\) is the angular position on the unit circle, in radians).
The discrete time complex exponentials have the following property.
\[e^{j \omega n}=e^{j(\omega+2 \pi) n} \nonumber \]
Given this property, if we have a complex exponential with frequency \(\omega + 2 \pi\), then this signal "aliases" to a complex exponential with frequency \(\omega\), implying that the equation representations of discrete complex exponentials are not unique.
Unit Impulses
The second-most important discrete-time signal is the unit sample, which is defined as
\[\delta[n]=\left\{\begin{array}{l}
1 \text { if } n=0 \\
0 \text { otherwise }
\end{array}\right. \nonumber \]
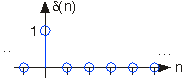
More detail is provided in the section on the discrete time impulse function. For now, it suffices to say that this signal is crucially important in the study of discrete signals, as it allows the sifting property to be used in signal representation and signal decomposition.
Unit Step
Another very basic signal is the unit-step function defined as
\[u[n]=\left\{\begin{array}{ll}
0 & \text { if } n<0 \\
1 & \text { if } n \geq 0
\end{array}\right. \nonumber \]
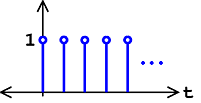
The step function is a useful tool for testing and for defining other signals. For example, when different shifted versions of the step function are multiplied by other signals, one can select a certain portion of the signal and zero out the rest.
Common Discrete Time Signals Summary
Some of the most important and most frequently encountered signals have been discussed in this module. There are, of course, many other signals of significant consequence not discussed here. As you will see later, many of the other more complicated signals will be studied in terms of those listed here. Especially take note of the complex exponentials and unit impulse functions, which will be the key focus of several topics included in this course.