
1.3: Ratslife
- Page ID
- 14769

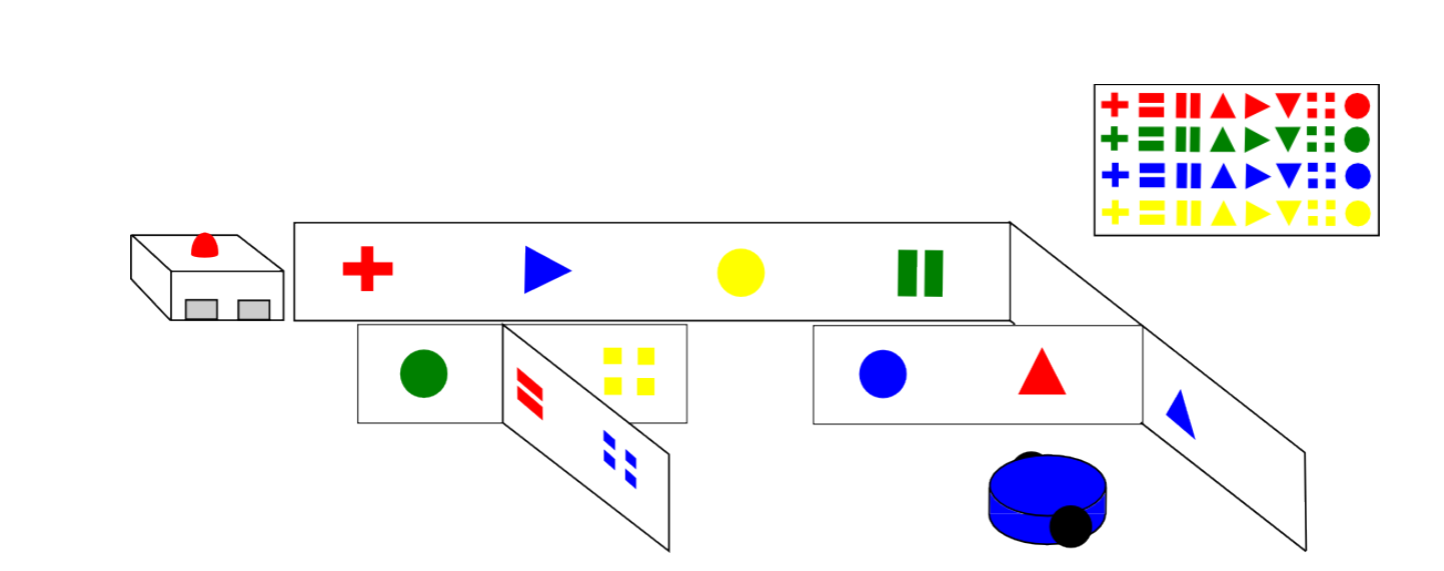
Ratslife is a miniature robot maze competition developed by Olivier Michel from Cyberbotics S.A. The Ratslife environment can easily be created from LEGO bricks, card board or wood and the game can be played with any two mobile robots, preferably ones with the ability to identify markers in the environment. These include simple differential-wheel educational platforms with onboard cameras or even a smart-phone driven robot. Figure 1.3 shows a simple sample environment that can be constructed from craft materials and can be used to teach the practical aspects of mobile robots for competitions.
In RatsLife, two miniature robots compete on searching for four “feeders” that are hidden in a maze. Once a robot reaches a feeder, it receives “energy” to go on for another 60s, and the feeder becomes temporarily unavailable. After a short while, the feeder becomes available again. The feeders can be either controlled by a referee who also takes care of time-keeping or constructed as part of a simple curriculum on electronics or mechatronics.
It should be clear by now, how YOU would solve these tasks using your abilities, and you should have also thought about fall-back strategies in case some of your sensors are unavailable. Here are some possible algorithms for a robot, ordered after the capabilities that it provides:
- Imagine you have a robot that can only drive (actuation) and bounce off a wall. The resulting random walk will eventually let the robot reach a feeder. As the allowed time to do so is limited, it is likely that the robot’s energy will soon deplete.
- Now imagine a robot that has a sensor that gives it the ability to estimate its distance from a wall. This could be a whisker, an infrared distance sensor, an ultra-sound distance sensor, or a laser range finder. The robot could now use this sensor to keep following a wall to its right. Using this strategy for solving the maze, it will eventually explore the entire maze except for islands inside of it.
- Finally, think about a robot that could identify simple patterns using vision, has distance sensors to avoid walls, and an “odometer” to keep track of its wheel rotations. Using these capabilities, a potential winning strategy would be to explore the environment, identify markers in the environment using vision and use them to create a map of all feeder locations, calculate the shortest path from feeder to feeder and keep going back and forth between them. Strategy-wise, it might make sense to wait just in front of the feeder and approach it only shortly before the robot runs out of power.