
4.5: Planning at different length-scales
- Page ID
- 14792

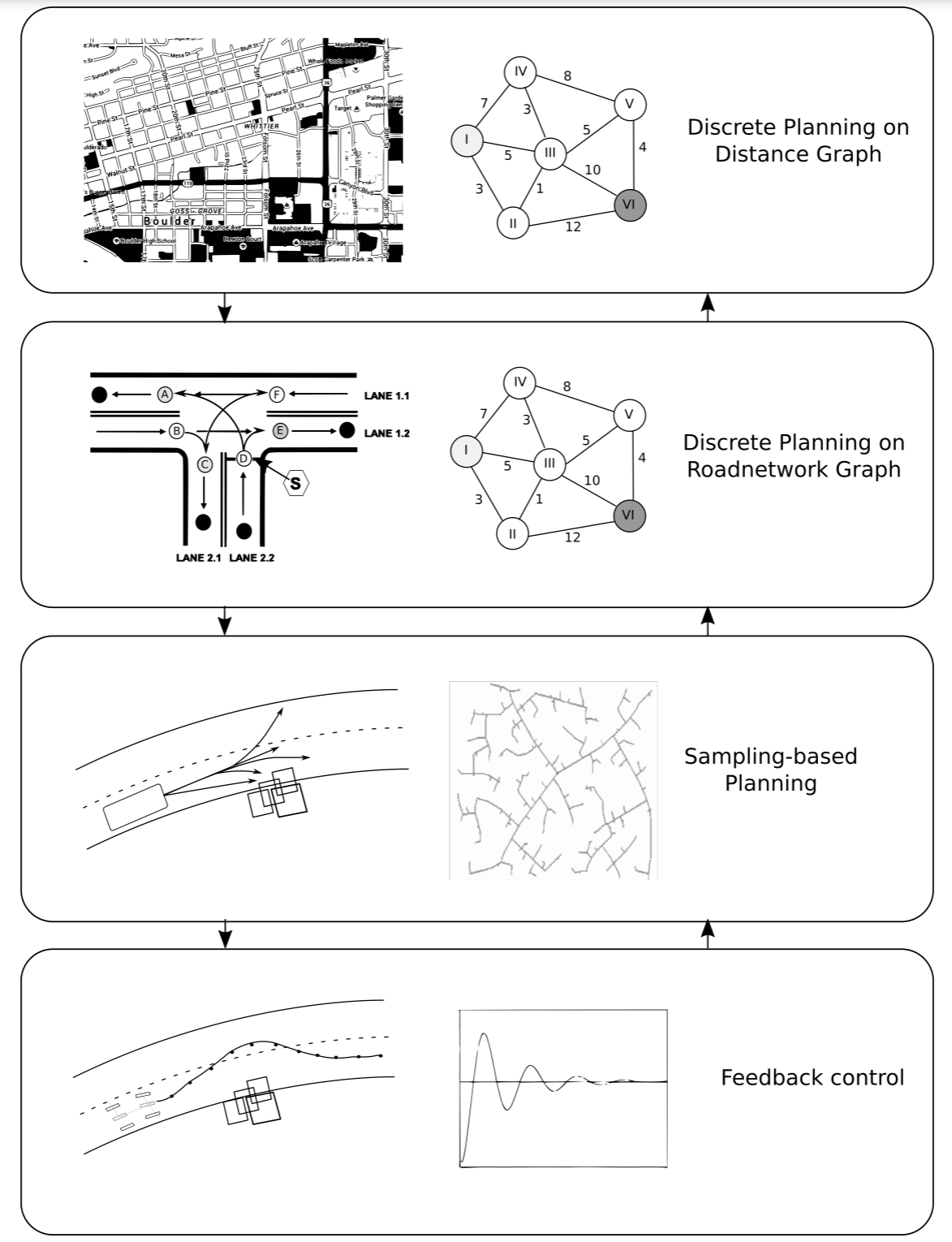
In practice, no one map representation and planning algorithm might be sufficient. To plan a route for a car, for example, might involve a coarse search over the street network such as performed by your car’s navigation system, but not involve planning which lane to actually choose. Planning lanes and how to navigate round-abouts and intersections will then involve another layer of discrete planning. How to actually move the robot within a lane and avoid local obstacles, might then be best done with a sampling-based planning algorithm. Finally, trajectories need to be turned into wheel speeds and turn angles, possibly using some form of feedback control. This hierarchy is depicted in Figure 4.7. Here, downward-pointing arrays indicate input that one planning layer provides to the one below. Upward-pointing arrows instead indicate exceptions that cannot be handled by the lower levels. For example, a feedback controller cannot handle obstacles well, requiring the samplingbased planning layer to come up with a new trajectory. Should the entire road be blocked, this planner would need to hand-off control the lane-based planner. A similar case can be made for manipulating robots, which also need to combine multiple different representations and controllers to plan and execute trajectories efficiently.
Note that this representation does not include a reasoning level that encodes traffic rules and common sense. While some of these might be encoded using cost-functions, such as maximizing distance from obstacles or insuring smooth riding, other more complex behaviors such as adapting driving in the presence of cyclists or properties of the ground need to be implemented in an additional vertical layer that has access to all planning layers.