
5.7: Terminology
- Page ID
- 59298

It is now time to introduce a more precise definition of terms such as “speed” and “resolution”, as well as additional taxonomy that is used in a robotic context.
Roboticists differentiate between active and passive sensors. Active sensors emit energy of some sort and measure the reaction of the environment. Passive sensors instead measure energy from the environment. For example, most distance sensors are active sensors (as they sense the reflection of a signal they emit), whereas an accelerometer, compass, or a push-button are passive sensors.
The difference between the upper and the lower limit of the quantity a sensor can measure its known as its range. This should not be confused with the dynamic range, which is the ratio between the highest and lowest value a sensor can measure. It is usually expressed on a logarithmic scale (to the basis 10), also known as “decibel”. The minimal distance between two values a sensor can measure is known as its resolution. The resolution of a sensor is given by the device physics (e.g., a light detector can only count multiples of a quant), but usually limited by the analog-digital conversion process. The resolution of a sensor should not be confused with its accuracy or its precision (which are two different concepts). For example, whereas an infrared distance sensor might yield 4096 different values to encode distances from 0 to 10cm, which suggests a resolution of around 24 micrometers, its precision is far above that (in the order of millimeters) due to noise in the acquisition process.
Technically, a sensors accuracy is given by the difference between a sensor’s (average) output m and the true value v:
\[accuracy=1-\frac{\left | m-v \right |}{v}\]
This measure provides you with a quantity that approaches one for very accurate values and zero if the measurements group far away from the actual mean. In practice, however, this measure is only rarely used and accuracy is provided with absolute values or a percentage at which a value might exceed the true measurement.
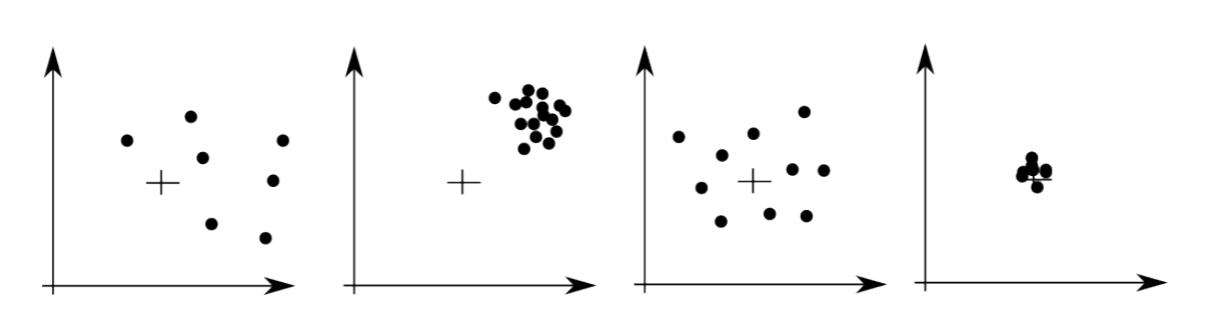
A sensor’s precision instead is given by the ratio of range and statistical variance of the signal. Precision is therefore a measure of repeatability of a signal, whereas accuracy describes a systematic error that is introduced by the sensor physics. This is illustrated in Figure 5.7.1.
A GPS sensor is usually precise within a few meters, but only accurate to tens of meters. This becomes most obvious when satellite configurations change, resulting in the precise region jumping by a couple of meters. In practice, this can be avoided by fusing this data with other sensors, e.g. from an IMU.
The speed at which a sensor can provide measurements is known as its bandwidth. For example, if a sensor has a bandwidth of 10 Hz, it will provide a signal ten times a second. This is important to know, as querying the sensor more often is a waste of computational time and potentially misleading.