
3.6: Moment of a Force About an Axis
- Page ID
- 111320

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)It is sometimes useful to be able to calculate the moment a force exerts about a certain axis that is relevant to the problem. An example would be a force on the vault door in the image below. If we took the moment about a point (such as one of the hinges on the door), we may find that the moment vector does not line up with the axis of this hinge. In that case, the component of the moment vector that lines up with the axis of the hinge will cause a rotation, while the component of the moment vector that does not line up with the axis of the hinge will cause reaction moments in the hinge. If we are only interested in the rotation of the door, we will want to find the moment that the force exerts specifically about the axis of the hinges.

Calculating the Moment About an Axis via the Dot Product
To find the moment of a force about a specific axis, we find the moment that the force exerts about some point on that axis and then we find the component of the moment vector that lines up with the axis we are interested in.
To do this mathematically, we use the cross product to calculate the moment of the force about any point along the axis, and then we take the dot product of a unit vector \(\vec{u}\) along the axis and the moment vector we just calculated. \[ M \, = \, \vec{u} \cdot (\vec{r} \times \vec{F}) \]
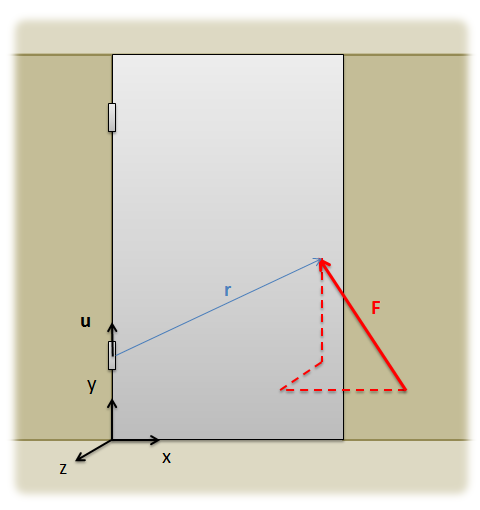
The unit vector \(\vec{u}\) has a magnitude of one and will be pointing in the direction of the axis we are interested in. Your final answer from this operation will be a scalar value (having a magnitude but no direction). This is the magnitude of the moment about the given axis, with the direction being specified by the unit vector \(\vec{u}\).
A 5kN force in the y-z plane is exerted at the end of an arm as shown below. What is the moment that this force exerts about the central shaft (the y axis)?
![A flat L-shaped piece of metal lies in the plane of the screen (the xy plane), with its right angle pointing down and its diagonals 45 degrees from the vertical. The left side of the L is attached to another flat piece of metal with hinges, and a unit vector u points along this line of attachment. A 5-foot-long vector r points from the L's right angle to its right tip, where a force of [5, -10, 10] lbs is exerted.](https://eng.libretexts.org/@api/deki/files/41754/P1.png?revision=1)
- Solution
-
Video \(\PageIndex{2}\): Worked solution to example problem \(\PageIndex{1}\), delivered by Dr. Jacob Moore. YouTube source: https://youtu.be/bP9iKRCCrAc.
A flat L-shaped plate is attached via two hinges as shown in the diagram below. If force \(F\) acts on the plate as shown in the diagram, what is the moment that force \(F\) exerts about the axis of the hinges?

- Solution
\[
\begin{array}{l}
\vec{r}=[-.3, .4,0] \\
\vec{F}=[0,-5 \sin (30), 5 \cos (30)] \\
\vec{M}=\vec{r} \times \vec{F}=[1.73,1.30, .75] \\
\vec{U}=[0,1,0] \leftarrow \text { yaxis } \\
M=\vec{U} \cdot \vec{M}=1.30 \mathrm{kNm}
\end{array}
\]
A 100 lb force acts along the line connecting points O and A in the diagram below. What moment does this force exert about the axis connecting points B and C?

- Solution
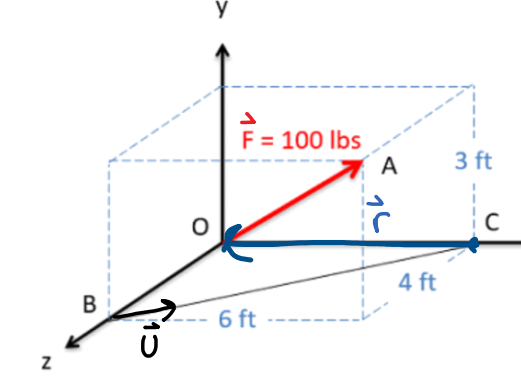
\[\begin{array}{l}
L_{O A}=\sqrt{6^2+4^2+3^2}=\sqrt{61} \\
L_{B C}=\sqrt{6^2+4^2}=\sqrt{52}
\end{array}\]
\[ \begin{array}{c}
\vec{r}=[-6,0,0] \\
\vec{F}=\left[100 \frac{6}{\sqrt{61}}, 100 \frac{3}{\sqrt{61}}, 100 \frac{4}{\sqrt{61}}\right] \\
\vec{M}=\vec{r} \times \vec{F}=\left[0, \frac{2400}{\sqrt{61}},-\frac{1800}{\sqrt{61}}\right] \\
\vec{U}=\left[\frac{6}{\sqrt{52}}, 0,-\frac{4}{\sqrt{52}}\right] \\
M=\vec{U} \cdot \vec{M}=+\frac{360}{\sqrt{713}}=127.8 \mathrm{ftlbs}
\end{array} \]