
12.5: Robust Performance
- Page ID
- 47297

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \) \( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)\(\newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\) \( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\) \( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\) \( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\) \( \newcommand{\Span}{\mathrm{span}}\) \(\newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\) \( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\) \( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\) \( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\) \( \newcommand{\Span}{\mathrm{span}}\)\(\newcommand{\AA}{\unicode[.8,0]{x212B}}\)
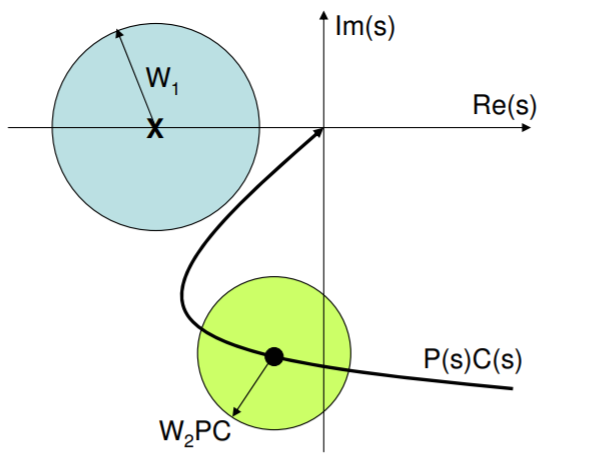
The condition for good performance with plant uncertainty is a combination of the two conditions discussed in the previous sections. Graphically, the disk at the critical point, with radius \(|W_1|\), should not intersect the disk of radius \(|W_2 PC|\), centered on the nominal locus \(PC\). This is met if
\[ |W_1 S| + |W_2 T| \, < \, 1. \]
The robust performance requirement is related to the magnitude \(|PC|\) at different frequencies, as follows:
- At low frequency, \(|W_1 S| \simeq |W_1 / PC|\), since \(|PC|\) is large. This leads directly to the performance condition \(|PC| > |W_1|\) in this range.
- At high frequency, \(|W_2 T| \simeq |W_2 PC|\), since \(|PC|\) is small. We must therefore have \(|PC| < 1/|W_2|\), for robustness.
.png?revision=1)