
11.1: Compression buckling of thin rectangular plates
- Page ID
- 95322
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
11.7 Compression buckling of thin rectangular plates
Consider the perfectly flat plate subject to a longitudinal compressive force of magnitude Px applied in a spatially uniform manner along edges x = 0 and x = a, as shown in figure 11.24. The equilibrium response of the plate in linear theory is that of pure compression in the x-y plane with no out-of-plane deflection of the midsurface. That is, in the pre-buckling equilibrium state the plate remains flat. The normal stress σx in the plate is spatially uniform, and we write it as  , where
, where  is the applied compressive stress.
is the applied compressive stress.
At a critical value of the compressive force Pxcr the plate will buckle, or deflect out of the flat pre-buckling equilibrium state. To determine this critical force we have to consider a slightly deflected equilibrium configuration of the plate, similar to the analysis of the perfect column presented in article 11.1. Refer to Brush and Almroth (1975) for the details of this adjacent equilibrium analysis for the critical force.

Fig. 11.24 Uniformly applied compressive forces applied to opposite longitudinal edges of a rectangular plate.
Instead of a detailed adjacent equilibrium analysis of the plate, we can make a comparison to the critical force determined for the pinned-pinned column in figure 11.6. The configuration of the plate comparable to the pinned-pinned column has simply supported, or hinged, edges at x = 0 and x = a, and has free edges at y = 0 and y = b. The compressively loaded plate for these boundary conditions is called a wide column. The critical force for the pinned-pinned column is

For the plate, replace the modulus of elasticity E in the column formula by  , since the plate is stiffer than the column. Also set L = a for the plate. The formula for the second area moment of a rectangular cross section is
, since the plate is stiffer than the column. Also set L = a for the plate. The formula for the second area moment of a rectangular cross section is  . Hence, eq. (11.106) transforms to
. Hence, eq. (11.106) transforms to

For the wide column configuration of the plate, the critical load is written in the form

where the bending stiffness, or flexural rigidity, of the plate is defined as

The critical compressive stress at buckling is simply  . Divide eq. (11.107) by area bt to get
. Divide eq. (11.107) by area bt to get

By convention, this critical compressive stress is written in the form

where kc is a nondimensional buckling coefficient for compressive loading, which is a function of the plate aspect ratio a∕b. For the unloaded edges free and the loaded edges simply supported, this buckling coefficient is

For other support conditions on the edges x = 0, x = a, y = 0, and y = b, the critical compressive stress is also given by eq. (11.110) but the compressive bucking coefficient is a different function of the plate aspect ratio. The transition from column to plate as supports are added along the unloaded edges (y = 0 and y = b) are depicted in figure 11.25 on page 319. The compressive buckling coefficient is plotted for various support conditions as shown in figure 11.26 on page 320. Note that some of the curves for the buckling coefficient exhibit cusps, or discontinuous slopes, at selected values of the plate aspect ratio. The cusps correspond to changes in the half wave length of the buckle pattern along the x-direction. In particular, for the plate with simple support on all four edges, case C in figure 11.26 on page 320, note that kc = 4 for integer aspect ratios.
11.7.1 Simply supported rectangular plate
Consider a plate simply supported on all four edges and subject to uniform compressive on edges x = 0 and x = a. In the pre-buckling equilibrium configuration the plate remains flat,  , with a spatially uniform compressive stress equal to the applied compressive stress σ. From the method of adjacent equilibrium, the out-of-plane displacement of the plate at the onset of buckling is
, with a spatially uniform compressive stress equal to the applied compressive stress σ. From the method of adjacent equilibrium, the out-of-plane displacement of the plate at the onset of buckling is

where m and n are positive integers and A1 is an arbitrary amplitude. Integer m corresponds to the number of half waves in the x-direction and integer n corresponds to the number of half waves in the y-direction. Thus, specific values of integers m and n in eq. (11.112) characterize a buckling mode, and for each buckling mode there is a corresponding buckling stress. Equation (11.110) is the formula for the compressive stress at buckling, with the compressive buckling coefficient given by

The critical stress is the lowest buckling stress, which occurs for a certain choice of m and n. Since kc is directly proportional to powers of integer n, the minimum value of kc occurs for n = 1. Then minimum values of kc are related to a∕b and integer m by

Critical values of the compressive buckling coefficient as a function of a few aspect ratios are listed in table 11.4.
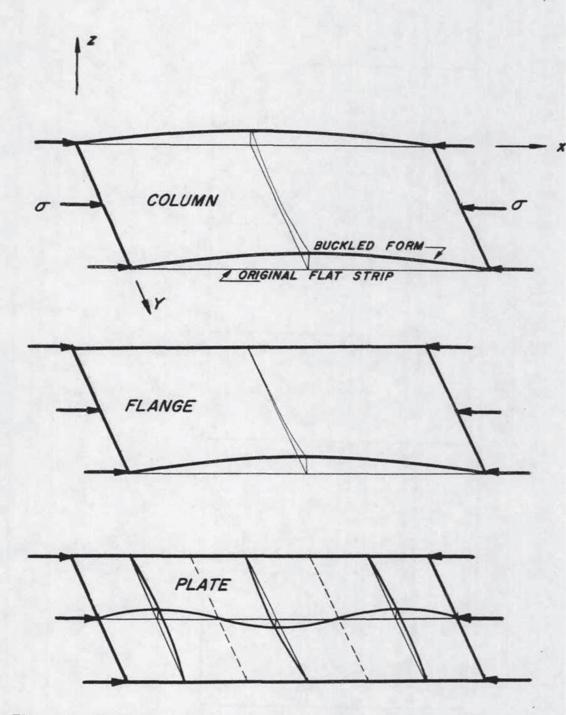
Fig. 11.25 Transition form column to plate as supports are added along unloaded edges. Note changes in buckle configurations (NACA TN 3781, figure 1).
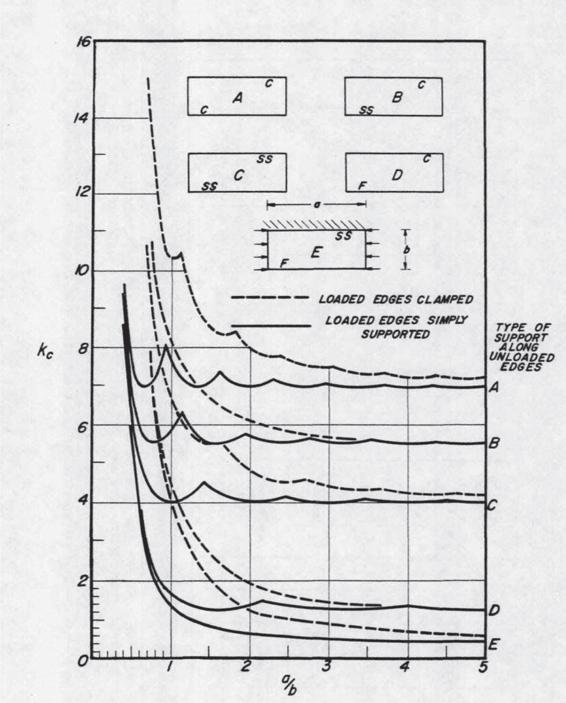
Fig. 11.26 Compression buckling coefficient for flat rectangular plates (NACA TN 3781, figure 14).
Table 11.4 Compression buckling coefficient for selected plate aspect ratios
|
Plate aspect ratio |
Number of half waves in the x-direction |
Critical compressive buckling coefficient |
|---|---|---|
|
|
m = 1 |
|
|
|
m = 2 |
|
|
|
m = 3 |
|


These critical values of the compression buckling coefficient are plotted as case C in figure 11.26 on page 320. The buckling modes for three integer values of the aspect ratio are depicted in figure 11.27. There is one half wave across the width (n = 1) and the number of half waves across the length, m, increases with increasing aspect ratio. For integer values of the aspect ratio the critical value of the compressive buckling coefficient kcr = 4, and it follows that the critical compressive stress is

From eq. (11.112) the length of a half wave in the x-direction is a∕m, and the length of a half wave in the y-direction is the plate width b for n = 1. These half wave lengths are the same when  , or
, or  . That is, the half wave lengths in the x- and y-directions are the same for integer values of the aspect ratio. Hence, for integer values of the plate aspect ratio the buckling mode consists of a sequence of square buckles.
. That is, the half wave lengths in the x- and y-directions are the same for integer values of the aspect ratio. Hence, for integer values of the plate aspect ratio the buckling mode consists of a sequence of square buckles.
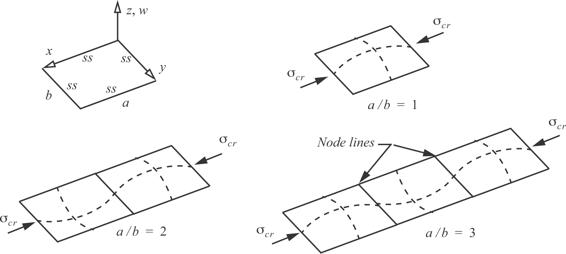
Fig. 11.27 Compression buckling modes for integer aspect ratios of a simply supported rectangular plate.
Example 11.4 Critical load for simply supported rectangular plate in compression
Let a = 20 in., b = 10 in.,  in.,
in.,  , and
, and  . From eq. (11.110) the critical compressive stress
. From eq. (11.110) the critical compressive stress

From eq. (11.114) the compression buckling coefficient is

For  , respectively. For larger values of m, coefficient kc is larger. The minimum value of kc is 4 corresponding to m = 2. Hence, the critical stress is
, respectively. For larger values of m, coefficient kc is larger. The minimum value of kc is 4 corresponding to m = 2. Hence, the critical stress is

The critical compressive load Pcr = σcrbt. Hence,

The buckling mode for  has one half sine wave in the transverse direction and two half waves in the longitudinal direction. The load
has one half sine wave in the transverse direction and two half waves in the longitudinal direction. The load  is the lowest load at which such a plate can lose its stability.
is the lowest load at which such a plate can lose its stability.
■
11.8 Buckling of flat rectangular plates under shear loads
Consider a thin, rectangular plate with a thickness denoted by t, and the in-plane dimensions denoted by a and b, where  . Note that a denotes the long dimension of the plate and b denotes the short dimension. It is subject to uniformly distributed shear stress τ as illustrated in figure 11.28. From Mohr’s circle for plane stress, the state of pure shear is equivalent to tensile and compressive normal stresses at forty-five degrees to the direction of pure shear. It is this compressive normal stress that leads to buckling of the thin plate subjected to shear.
. Note that a denotes the long dimension of the plate and b denotes the short dimension. It is subject to uniformly distributed shear stress τ as illustrated in figure 11.28. From Mohr’s circle for plane stress, the state of pure shear is equivalent to tensile and compressive normal stresses at forty-five degrees to the direction of pure shear. It is this compressive normal stress that leads to buckling of the thin plate subjected to shear.

Fig. 11.28 Plate subject to in-plane shear loading.
The critical value of the shear stress per unit length, τcr, is given by the formula

where ks is a nondimensional buckling coefficient for shear loading. This buckling coefficient is a function of the plate aspect ratio a∕b and the boundary conditions applied to the plate. Values of the shear buckling coefficient are given in figure 11.30 on page 324. The buckling mode labeled the symmetric mode in the figure pertains to a buckled form that is symmetric with respect to a diagonal across the plate at the node line slope. For a narrow range of aspect ratios the plate buckles in an antisymmetric mode. For an infinitely long strip, or a∕b→∞,  for simply supported, or hinged, edges at
for simply supported, or hinged, edges at  , and
, and  for clamped edges.
for clamped edges.
A least squares fit of the shear buckling coefficient as a function of the plate aspect ratio is convenient in problem solving. For the simply supported plate, or the plate with hinged edges, the data listed in table 11.5 was read from the graph in figure 11.30.
Table 11.5 Shear buckling coefficient for selected plate aspect ratios
|
a/b |
|
|---|---|
|
1 |
9.6 |
|
2 |
6.4 |
|
3 |
5.8 |
|
4 |
5.7 |
|
5 |
5.5 |

These data are fit to the functions 1 and  . The result of the least squares fit to these data is
. The result of the least squares fit to these data is

The least squares fit and the input data are plotted in figure 11.29.
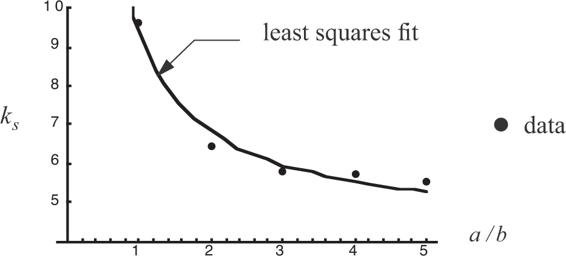
Fig. 11.29 Graph of eq. (11.117) compared to discrete data listed in table 11.5.

Fig. 11.30 Shear-buckling-stress coefficient of plates as a function of a/b for clamped and hinged edges (NACA TN 3781, figure 22).
11.9 Buckling of flat rectangular plates under combined compression and shear
A plate subject to uniformly applied longitudinal compression and shear is shown in figure 11.31. The critical combination of shear and compression stresses under different boundary conditions and different aspect ratios of the plate can be approximated to a sufficient accuracy by
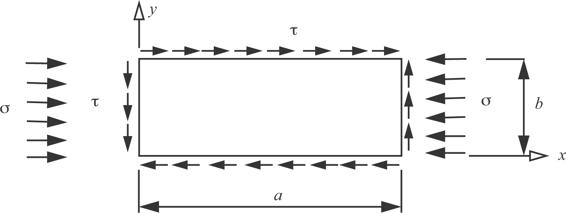
Fig. 11.31 Plate subject to longitudinal compression and in-plane shear loading.

where  and
and  are the critical values of the separately acting shear stress and the compression normal stress, respectively (NACA TN 3781, pp. 38, 39). Equation (11.118) is plotted in figure 11.32.
are the critical values of the separately acting shear stress and the compression normal stress, respectively (NACA TN 3781, pp. 38, 39). Equation (11.118) is plotted in figure 11.32.
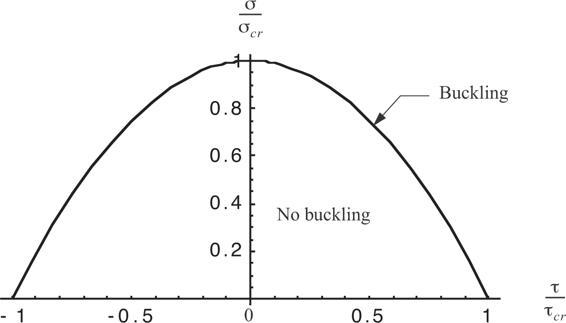
Fig. 11.32 Buckling interaction relationship for critical combinations of shear and compression.
Example 11.5 Wing rib spacing based on a buckling constraint
The stringer stiffened box beam that is the main spar in a wing is shown in figure 11.33. For a pull-up maneuver, the calculated transverse shear force  . and the bending moment
. and the bending moment  –in. at the wing root. The thickness and width of the upper and lower cover skins are
–in. at the wing root. The thickness and width of the upper and lower cover skins are  . and bf = 24in., respectively. The thickness and height of the left and right webs are
. and bf = 24in., respectively. The thickness and height of the left and right webs are  . and
. and  ., respectively, and the flange area of the stringers
., respectively, and the flange area of the stringers  . The material is isotropic with properties
. The material is isotropic with properties  and
and  . For Mx < 0, the upper skin is in compression. Determine the rib spacing, denoted by a, such that the margin of safety for buckling of the upper skin is slightly positive.
. For Mx < 0, the upper skin is in compression. Determine the rib spacing, denoted by a, such that the margin of safety for buckling of the upper skin is slightly positive.
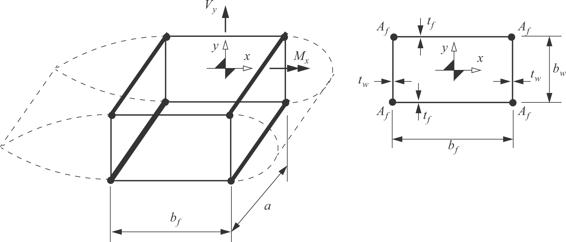
Fig. 11.33 Wing box beam of example 11.5.
Solution. The centroid and the shear center of the cross section coincide with the center of the box beam due to symmetry. The normal stress due to bending in the upper skin is calculated from the flexure formula; i.e.,

where the second area moment of the cross section about the x-axis is

Hence, the bending normal stress in the upper skin is

The shear stress in the upper skin is determined from the analysis of the shear flow distribution around the contour of the cross section, which is shown in figure 11.34.
The shear flow in the upper skin is

The shear stress 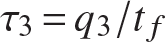 , and its evaluation is
, and its evaluation is

Fig. 11.34 Shear flow distribution for the box beam of example 11.5.
Computing the maximum magnitude and the average value of this shear stress results in

The maximum magnitude of the shear stress in the upper skin is 7.25 percent of the magnitude of the bending normal stress. Moreover, the average value of the shear stress is zero in the upper skin. Hence, it is reasonable to neglect the effect of the shear stress on the buckling of the upper skin.
Assume the upper skin is a simply supported rectangular plate between the stringers and ribs. Actually, the stringer and ribs provide rotational constraint to the upper skin, but the assumption of no rotational constraint is conservative with respect to design. The critical compressive stress for simple support on all four edges of the upper skin underestimates its actual value. Equation (11.110) for the top cover skin is

and eq. (11.114) for the compression buckling coefficient is

The margin of safety is defined by

The margin of safety (11.119) is positive for a feasible design, otherwise the design is infeasible. It should be a small positive value for a design of least weight. The computations for the margin of safety are listed in table 11.6.
A rib spacing of 16 in. is a feasible design with a slightly positive margin of safety.
■
Table 11.6 Margin of safety for selected rib spacings
|
a, in. |
a/ |
|
|
Margin of safety |
Design |
|---|---|---|---|---|---|
|
14 |
0.583 |
5.27905 |
20,708.6 |
0.12497 |
feasible |
|
15 |
0.625 |
4.95063 |
19,420.2 |
0.05498 |
feasible |
|
16 |
0.667 |
4.69444 |
18,415.3 |
0.000387 |
feasible |
|
17 |
0.708 |
4.49482 |
17,632.20 |
−0.04215 |
infeasible |
|
18 |
0.750 |
4.34028 |
17,026.0 |
−0.07509 |
infeasible |
|
19 |
0.792 |
4.2223 |
16,563.2 |
−0.1002 |
infeasible |




11.10 References
- Brush, D. O., and B. O. Almroth. Buckling of Bars, Plates, and Shells. New York: McGraw-Hill, 1975, pp. 75–105.
- Budiansky, B., and J. W. Hutchinson. “Dynamic Buckling of Imperfection-Sensitive Structures.” In Proceedings of the Eleventh International Congress of Applied Mechanics (Munich, Germany). 1964, pp. 639–643.
- Budiansky, B. “Dynamic Buckling of Elastic Structures: Criteria and Estimates.” In Proceedings of an International Conference at Northwestern University (Evanston IL). New York and Oxford: Pergamon Press, 1966.
- Gerard, G., and H. Becker. Handbook of Structural Stability: Part I, Buckling of Flat Plates. Technical Report NACA-TN 3781. Washington, DC: Office of Scientific and Technical Information, U.S. Department of Energy, 1957.
- Koiter, W. T. “The Stability of Elastic Equilibrium.” PhD diss., Teehische Hoog School, Delft, The Netherlands, 1945. (English translation published as Technical Report AFFDL-TR-70-25, Air Force Flight Dynamics Laboratory, Wright-Patterson Air Force Base, OH, February 1970.)
- National Advisory Committee for Aeronautics (NACA), Technical Note 3781 (NACA-TN-3781) July 1957. https://ntrs.nasa.gov/api/citations/1930084505/downloads/19930084505.pdf.
- Ramberg, W., and Osgood, W. Description of Stress-Strain Curves by Three Parameters. Technical Report NACA-TN-902. Washington DC: NASA, 1943.
- Southwell, Richard V. “On the Analysis of Experimental Observations in Problems of Elastic Stability.” Proc. Roy. Soc. London A, no. 135 (April 1932): 601–616.
- Timoshenko, S. P., and J. M. Gere. Theory of Elastic Stability. New York: McGraw-Hill Book Company,1961, p.33.
- Ugural A. C., and S. K. Fenster. Advanced Strength and Applied Elasticity, 4th ed.,Upper Saddle River, NJ: Pearson Education, Inc., Publishing as Prentice Hall Professional Technical Reference, 2003, pp. 472–490.
11.11 Practice exercises
1. An ideal column of length L is pinned at one end and fixed to a rigid bar of length a at the other end. The second end of the rigid bar is pinned on rollers. Refer to figure 11.35 Find the critical load Pcr and discuss the extreme cases of a→0 and a→∞.
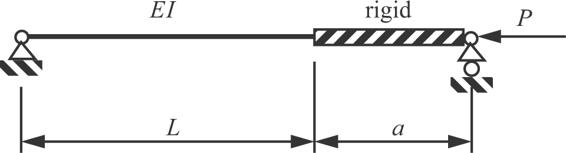
Fig. 11.35 Exercise 1.
2. The column shown in figure 11.36 is pinned at the left end and supported by an extensional spring of stiffness α at the loaded right end.
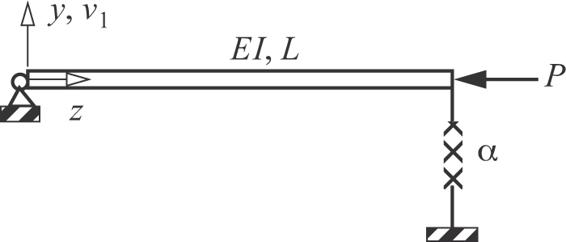
Fig. 11.36 Exercise 2.
a) Use the adjacent equilibrium method to show that the characteristic equation is

b) Plot the critical load Pcr as a function of α, 0≤α. For what values of α will the column buckle in the Euler mode? (i.e., case A in figure 11.6).
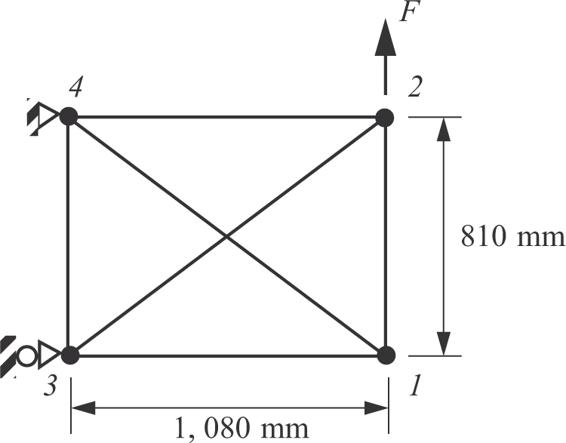
Fig. 11.37 Truss for exercise 3.
3. The statically indeterminate truss shown in figure 11.37 consists of six bars, labeled 1-2, 1-3, 1-4, 2-3, 2-4, and 3-4. It is subject to a vertical force F at joint number 2. The cross-sectional area of each bar is 2,000 mm2, the second area moment of each bar is 160,000 mm4, and the modulus of elasticity of each bar is 75,000 N/mm2.
a) Take bar force 1-4 as the redundant (i.e.,  ). Using Castigliano’s second theorem to determine the redundant Q in terms of the external load F.
). Using Castigliano’s second theorem to determine the redundant Q in terms of the external load F.
b) Determine the value of F in kN to initiate buckling of the truss.
c) If the yield strength of the material is 400 MPa in tension, determine the value of F in kN to initiate yielding of the truss.
4. Bars 1-2, 2-3, and 2-4 of the truss shown figure 11.38 are unstressed at the ambient temperature. Only bar 1-2 is heated above the ambient temperature. Determine the increase in temperature, denoted by ΔT, of bar 1-2 to cause buckling of the truss. The cross section of each bar is a thin-walled tube with radius R = 13mm and wall thickness  . Take length L = 762mm. All three bars are made of the same material with properties
. Take length L = 762mm. All three bars are made of the same material with properties  and
and  .
.
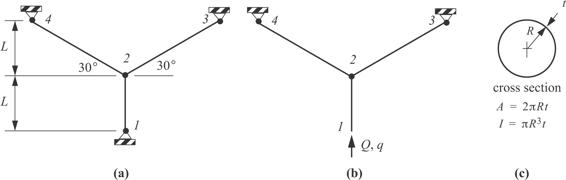
Fig. 11.38 Exercise 4. (a) three-bar truss, (b) base structure. (c) cross section of the bars.
5. Consider the wing spar in example 11.5. A counterclockwise torque  -in. is specified to act at the root cross section in addition to the specified transverse shear force and bending moment. Determine the rib spacing, denoted by a, such that the margin of safety with respect to buckling of the upper skin is slightly positive. Report the value of a to two significant figures and the associated margin of safety. The margin of safety is defined by the formula
-in. is specified to act at the root cross section in addition to the specified transverse shear force and bending moment. Determine the rib spacing, denoted by a, such that the margin of safety with respect to buckling of the upper skin is slightly positive. Report the value of a to two significant figures and the associated margin of safety. The margin of safety is defined by the formula

Use the average value of the shear stress over the width of the upper skin for the shear stress τ in the margin of safety formula. Remember that dimension b is smaller than dimension a in the formula for the critical value of the shear stress, and that b is the width of the plate/skin on which the compressive normal stress acts in the formula for σcr.
-
1. Richard V. Southwell (1888–1970), British mathematician specializing in applied mechanics. In his article “On the Analysis of Experimental Observations in Problems of Elastic Stability”, he discussed the coordinates used in the plot to correlate the experimental data on elastic column buckling with linear theory.