
12.4: Drag Force
- Page ID
- 84747

A simple model for the drag force on a baseball is
\[\textbf{F}_\mathrm{d} = - \frac{1}{2} \, \rho v C_\mathrm{d} A \hat{\textbf{V}}\notag \]
where \(\textbf{F}_\mathrm{d}\) is a vector that represents the force on the baseball due to drag, \(\rho\) is the density of air, \(C_\mathrm{d}\) is the drag coefficient, and \(A\) is the cross-sectional area.
\(\textbf{V}\) is the baseball’s velocity vector, \(v\) is the magnitude of \(\textbf{V}\), and \(\hat{\textbf{V}}\) is a unit vector in the same direction as \(\textbf{V}\). The minus sign at the beginning means that the result is in the opposite direction to \(\textbf{V}\).
The function in Listing 12.2 computes the drag force on a baseball:
Listing 12.2: A function that calculates the drag force on a baseball
function res = drag_force(V)
C_d = 0.3; % dimensionless
rho = 1.3; % kg / m^3
A = 0.0042; % m^2
v = norm(V); % m/s
res = -1/2 * C_d * rho * A * v * V;
endThe drag coefficient for a baseball is about 0.3. The density of air at sea level is about 1.3 kg/m3. The cross-sectional area of a baseball is 0.0042 m2.
Now we have to update acceleration to take drag into account:
function res = acceleration(t, P, V)
g = 9.8; % acceleration due to gravity in m/s^2
a_gravity = [0; -g];
m = 0.145; % mass in kilograms
a_drag = drag_force(V) / m;
res = a_gravity + a_drag;
endAs in Listing 12.1, acceleration represents acceleration due to gravity with a vector that has magnitude g and direction along the negative y-axis. But now it also computes drag force and divides by the mass of the baseball to get acceleration due to drag. Finally, it adds a_gravity and a_drag to get the total acceleration of the baseball.
Figure 12.3 shows the following quantities graphically: (1) acceleration due to drag, \(\textbf{D}\), which is in the opposite direction to (2) velocity, \(\textbf{V}\); (3) acceleration due to gravity, \(\textbf{G}\), which is straight down; and (4) total acceleration, \(\textbf{A}\), which is the sum of \(\textbf{D}\) and \(\textbf{G}\).
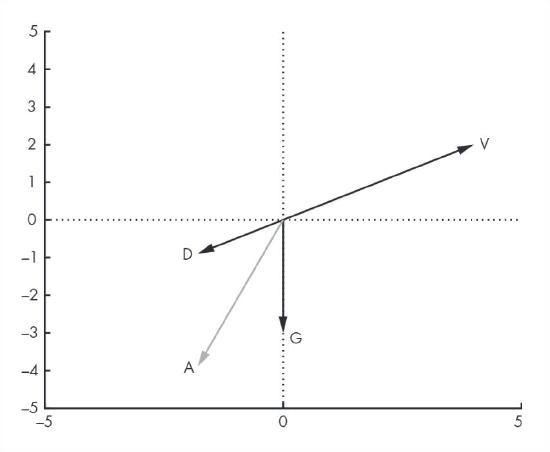
Figure 12.4 shows the results from ode45. The ball lands after about 5 s, having traveled less than 150 m, substantially less than what we got without air resistance, about 250 m.
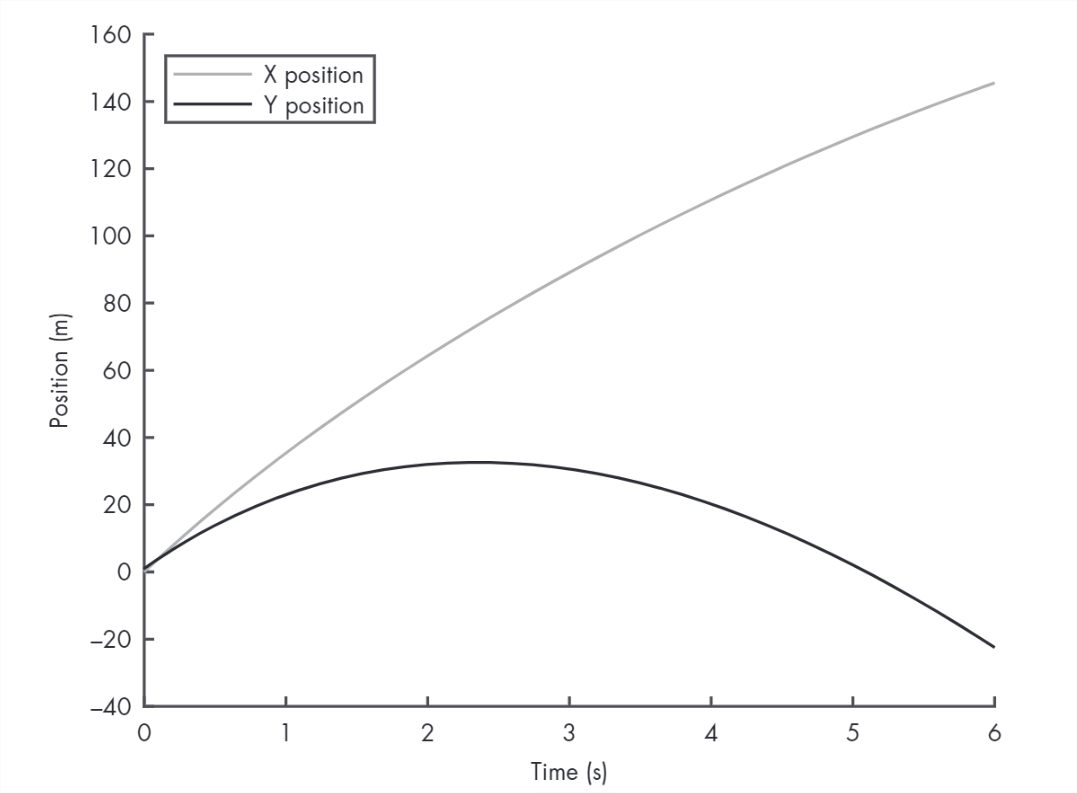
This result suggests that ignoring air resistance is not a good choice for modeling a baseball.