6.7: Bilinear Transform
- Page ID
- 88579

There is a way that we can make things a good bit easier for ourselves, however. The only drawback is that we have to do some complex analysis first, and look at a bilinear transform! Let's do one more substitution, and define another complex vector, which we can call :
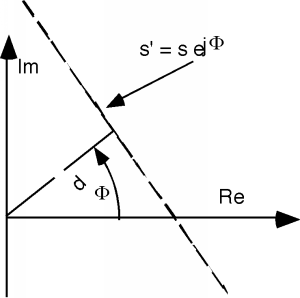
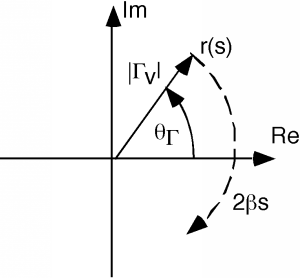
The vector is just the rotating part of the crank diagram which we have been looking at, which is labeled in Figure \(\PageIndex{1}\). It has a magnitude equal to that of the reflection coefficient, and it rotates around at a rate as we move down the line. For every there is a corresponding which is given by:
Now, it turns out to be easier if we talk about a normalized impedance, which we get by dividing by .
which we can solve for
This relationship is called a bilinear transform. For every that we can imagine, there is one and only one and for every there is one and only one . What we would like to be able to do, is find , given an . The reason for this should be readily apparent. Whereas, as we move along in , behaves in a most difficult manner (dividing one phasor by another), simply rotates around on the complex plane. Given one it is easy to find another . We just rotate around!
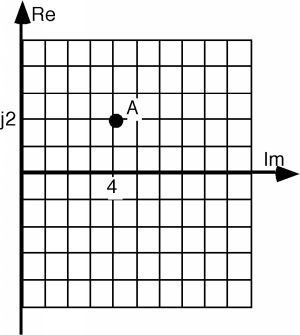
We shall find the required relationship in a graphical manner. Suppose I have a complex plane, representing . And then suppose I have some point \(A\) on that plane and I want to know what impedance it represents. I just read along the two axes, and find that, for the example in Figure \(\PageIndex{2}\), \(A\) represents an impedance of . What I would like to do would be to get a grid similar to that on the plane, but on the plane instead. That way, if I knew one impedence (say ) then I could find any other impedance, at any other , by simply rotating around by , and then reading off the new from the grid I had developed. This is what we shall attempt to do.
Let's start with Equation and re-write it as:
In order to use Equation, we are going to have to interpret it in a way which might seem a little odd to you. The way we will read the equation is to say: "Take and add 1 to it. Invert what you get, and multiply by -2. Then add 1 to the result." Simple, isn't it? The only hard part we have in doing this is inverting . This, it turns out, is pretty easy once we learn one very important fact.
The one fact about algebra on the complex plane that we need is as follows. Consider a vertical line, , on the complex plane, located a distance away from the imaginary axis as in Figure \(\PageIndex{3}\). There are a lot of ways we could express the line , but we will choose one which will turn out to be convenient for us. Let's let:
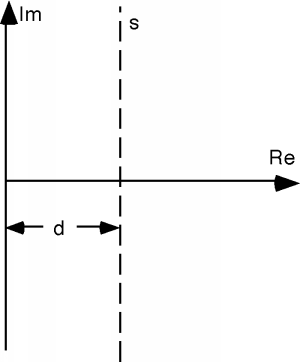
Now we ask ourselves the question: what is the inverse of s?
We can substitute for
And then, since
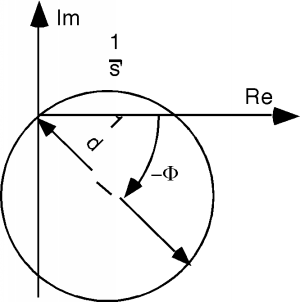
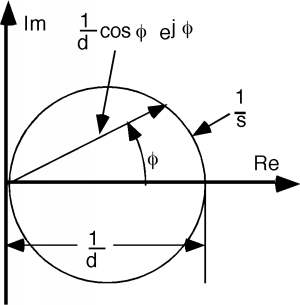 Figure \(\PageIndex{4}\): A plot of 1/s
Figure \(\PageIndex{4}\): A plot of 1/sA careful look at Figure \(\PageIndex{4}\) should allow you to convince yourself that Equation is an equation for a circle on the complex plane, with a diameter . If is not parallel to the imaginary axis, but rather has its perpendicular to the origin at some angle