
6.8: The Smith Chart
- Page ID
- 88580

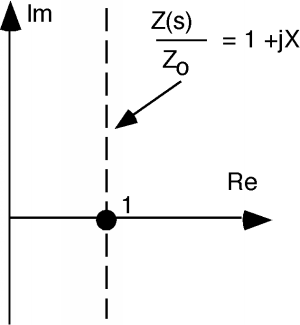
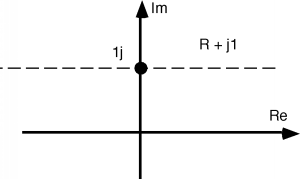
Now let's see how we can use The Bilinear Transform to get the coordinates on the plane transferred over onto the plane. The Bilinear Transform tells us how to take any and generate an from it. Let's start with an easy one. We will assume that , which is a vertical line that passes through 1 and can take on whatever imaginary part it wants, as shown in Figure \(\PageIndex{1}\).
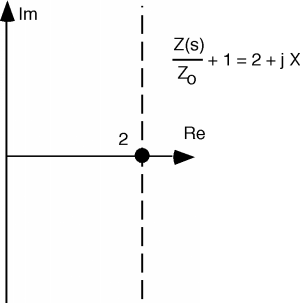
According to The Bilinear Transform, the first thing we should do is add 1 to . This gives us the line Figure \(\PageIndex{2}\).
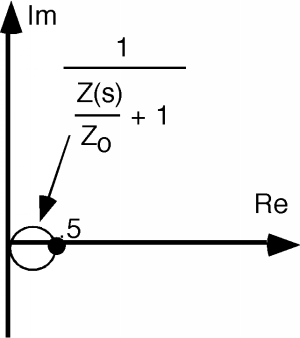
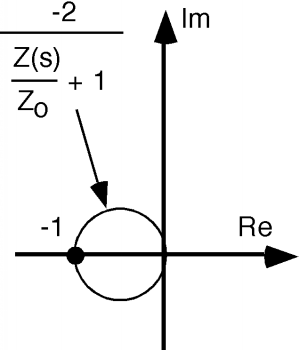
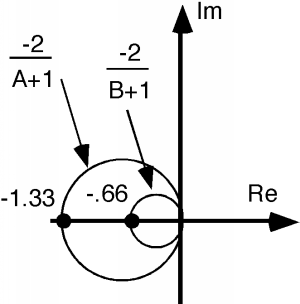
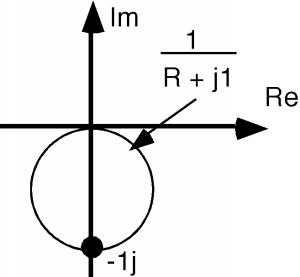
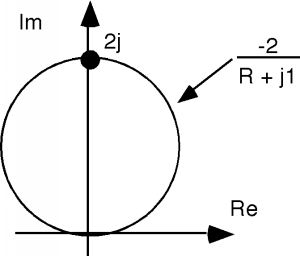
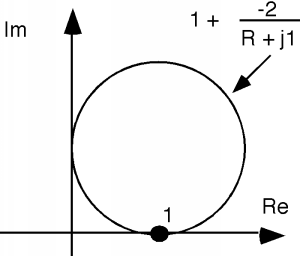
Now, we take the inverse of this, which will give us a circle of diameter 1/2 as shown in Figure \(\PageIndex{3}\). Now, according to The Bilinear Transform we take this circle and multiply it by -2, which is shown in Figure \(\PageIndex{4}\).
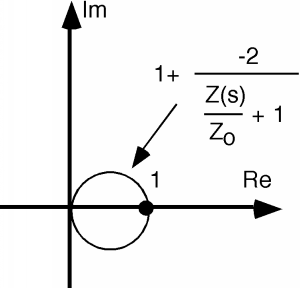
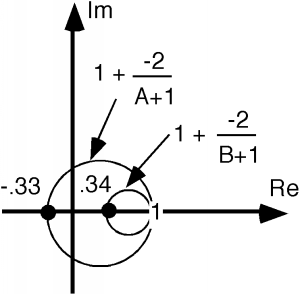
And finally, we take the circle and add +1 to it as shown in Figure \(\PageIndex{5}\). There, we are done with the transform. The vertical line on the plane that represents an impedance with a real part of +1 and an imaginary part with any value from to has been reduced to a circle with diameter 1, passing through \(0\) and \(1\) on the complex plane.
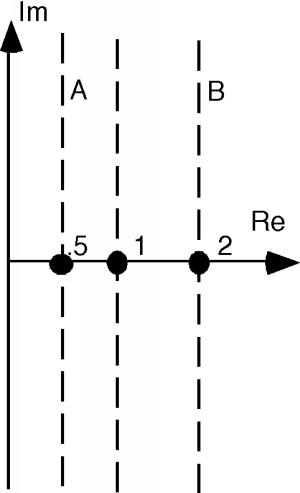
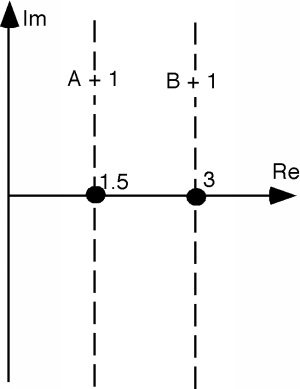
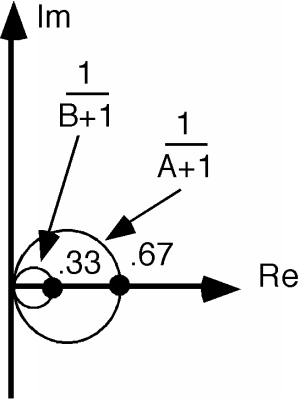
Let's do the same thing for and . We'll call these lines A and B respectively and just add these to the sketches we already have, as shown in Figure \(\PageIndex{6}\). Follow along with The Bilinear Transform, and see if you can figure out where each of these sketches comes from. We will simply be doing the same things again: add 1, invert, multiply by -2, and add 1 once again. As you can see in Figures \(\PageIndex{7}\), \(\PageIndex{8}\), \(\PageIndex{9}\), and \(\PageIndex{10}\), we get more circles. For lines inside the +1 real part, we end up with a circle that is larger than the +1 circle, and for lines which have a real part greater than +1, we end up with circles which are smaller in diameter than the +1 circle. All circles pass through the +1 point on the plane and are tangent to one another.
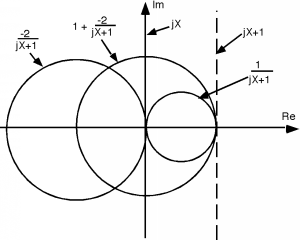
There are two special lines we should worry about. One is , the imaginary axis. We will put all of the transform steps together on Figure \(\PageIndex{11}\). We start on the axis, shift over one, get a circle with unity diameter when we invert, grow by two and flip around the imaginary axis when we multiply by -2, and then hop one to the right when +1 is added. Once again, you should work your way through the various steps to make sure you have a good understanding as to how this procedure is supposed to happen. Note that even the imaginary axis on the plane gets transformed into a circle when we go over onto the plane.
The other line we should worry about is . Now , and , and so the line gets mapped into a point at 1 when we do our transformation onto the plane. Even points at on the plane end up on the plane, and are easily accessible!
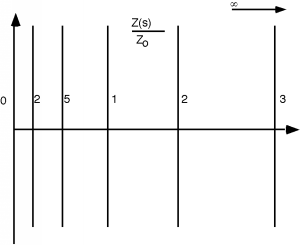
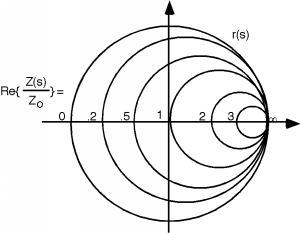
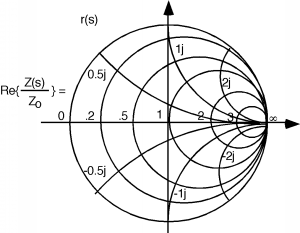
OK, Figure \(\PageIndex{12}\) is a plot of the plane. The lines shown represent the real part of that we want to transform. We run them all through The Bilinear Transform, to get them onto the plane. Now we have a whole family of circles, the biggest of which has a diameter of 2 (which corresponds to the imaginary axis) and the smallest of which has a diameter of 0 (which corresponds to points at ) Figure \(\PageIndex{13}\). The circles all fit within one another, and since a +1 was added to every transform as the final bit of manipulation, all of the circles pass through the point +1, . Circles with smaller diameters correspond to larger values of real , while the larger circles correspond to the lesser values of .
Well, we're halfway there. Now all we have to do is find the transform for the coordinate lines which correspond to the imaginary part of . Let's look at . When we add +1 to this, nothing happens! The line just slides over 1 unit, and looks just the same, as in Figure \(\PageIndex{14}\). Now we take its inverse. This will gives us a circle, but since the line we are inverting lies at an angle of with respect to the real axis, the major diameter of the circle will lie at an angle of when we go through the inversion process. This gives us a circle which is lying in the region of the complex plane Figure.
The next thing we do is to take this circle and multiply by -2. This will make the circle twice as large, but will also reflect it back up into the region of the complex plane, as shown in Figure \(\PageIndex{16}\).
And, finally, we add 1 to it, which causes the circle to hop one over to the right (Figure \(\PageIndex{17}\)).
We can do the same thing to other lines of constant imaginary part and we can then add more circles. (Or partial circles, for it makes no sense to go beyond the circles, as beyond that is the region corresponding to negative real part, which we would not expect to encounter in most transmission lines.) Take at least one of the other circles drawn here in Figure \(\PageIndex{18}\) and see if you can get it to end up in about the right place.
There is one line of interest which we have a take a little care with. That is the real axis, . This line is a distance 0 away from the origin, and so when we invert it, we get a circle with diameter. That's OK though, because that is just a straight line. So, the real axis of the plane transforms into the real axis on the plane.
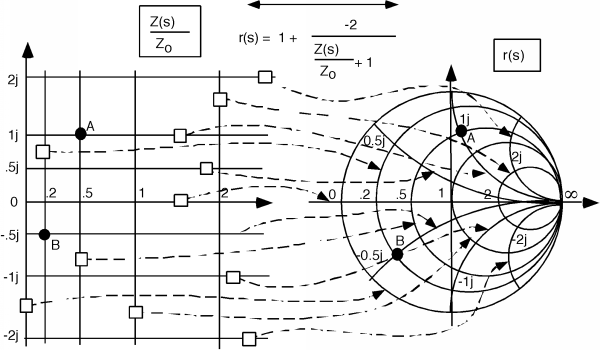
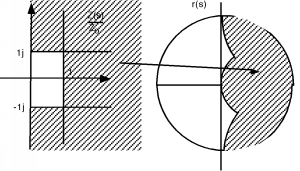
We have done a most wondrous thing! (Although you may not realize it yet.) We have taken the entire half plane of complex impedance and mapped the whole thing into a circle with diameter 1! Let's put the two of them side by side. (Although we can't show the whole plane of course.) These are shown in Figure \(\PageIndex{19}\), where we show how each line on maps into a (curved) line on the plane. Note also, that for every point on the plane ("A" and "B") there is a corresponding point on the plane. Pick a couple more points, "C" and "D" and locate them either on the plane, or the plane, and then find the corresponding point on the other plane.
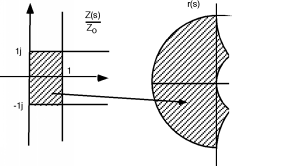
Note that the mapping is not very uniform. All of the region where either the real or imaginary part of is (a small square on maps into a major fraction of the plane as shown in Figure \(\PageIndex{20}\) whereas all the rest of the plane, all the way out to infinity in three directions (, , and ) map into the rest of the circle as shown in Figure \(\PageIndex{21}\).
This graph or transformation is called a Smith Chart, after the Bell Labs worker who first thought it up. It is a most useful and powerful graphical solution to the transmission line problem. In Introduction to Using the Smith Chart we will spend a little time seeing how and why it can be so useful.