
1.5: The Mass-Damper System II - Solving the 1st order LTI ODE for time response, given a pulse excitation and an IC
- Page ID
- 21083

An input of limited duration, typically called a pulse, is a very common type of excitation imposed onto systems. For example, when a hammer strikes a nail, the force imposed on the nail by the hammer is a pulse. A real pulse such as hammer impact force is often modeled as a half-sine pulse. Let the force acting on the mass in Figure 1.3.1 be the half-sine pulse described by the following figure and Equation \(\ref{eqn:1.5}\):
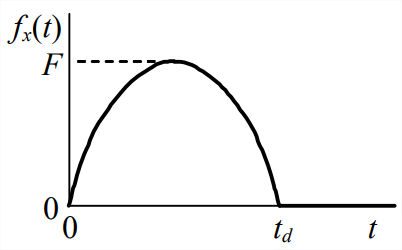
\[f_{x}(t)=\left\{\begin{array}{l}
F \sin \left(\pi \frac{t}{t_{d}}\right), 0 \leq t \leq t_{d} \\
0, t_{d}<t
\end{array}\right.\label{eqn:1.5} \]
In Equation \(\ref{eqn:1.5}\) for \(f_x(t)\), \(t_d\) denotes the pulse duration. The notation will be more manageable in this problem if we express the time-varying sinusoid in the form \(\sin \omega t\), where \(\omega\) denotes the circular frequency of oscillation, in radians per second. In this case, clearly the circular frequency is expressed in terms of the pulse duration as \(\omega = \pi /t_d\). Let us specify that the initial velocity of the mass at time \(t\) = 0 is some known value \(v_0\). The mathematical statement of the problem for finding the velocity time-history is:
\[\underline{\text{ODE}:} \quad m \dot{v}+c v=f_{x}(t) \\
\underline{\text{IC}:} \quad v(0)=v_{0} \\
\underline{\text{Find}:} \quad v(t) \quad \text{for all} \quad t>0 \nonumber \]
To solve this problem in closed form, we will use a method with which you should be familiar from your previous study of ODEs. First, we find the homogeneous (also called complementary) solution \(v_h(t)\), which is the solution of the homogeneous ODE, the version of Equation 1.3.3 with zero right-hand side:
\[m \dot{v}_{h}+c v_{h}=0\label{eqn:1.6} \]
A homogeneous LTI ODE always has solutions in time-linear powers of \(e\) = 2.71828... (the base of natural logarithms), with some initially unknown constant coefficients:
\[v_{h}(t)=C e^{\lambda t}, \nonumber \]
in which constants \(C\) and \(\lambda\) are unknown at this stage. To find \(\lambda\), we substitute the solution into the homogeneous ODE \(\ref{eqn:1.6}\):
\[m C \lambda e^{\lambda t}+c C e^{\lambda t}=(m \lambda+c) C e^{\lambda t}=0 \nonumber \]
If \(Ce^{\lambda t}\) = 0, we get the useless trivial solution \(v_h(t)\) = 0, so a useful solution requires that t \(m\lambda + c\) = 0, which is known as the characteristic equation of the ODE. Solution of this equation gives the so-called characteristic value, \(\lambda\) = \(-c/m\), leading to:
\[v_{h}(t)=C e^{-(c / m) t}\label{eqn:1.7} \]
Note that we still have not solved for constant \(C\). We can find \(C\) only after we have determined a particular solution, also known as the non-homogeneous solution because it is a solution that satisfies the complete ODE Equation 1.3.3 for the given right-hand side \(f_x(t)\). For this problem, we will need two particular solutions, because \(f_x(t)\) is defined differently over two different intervals of time, Equation \(\ref{eqn:1.5}\). First, we find a particular solution \(v_p(t)\) valid over the pulse duration, 0 \(\leq\) \(t\) \(\leq\) \(t_d\), for which the ODE is:
\[m \dot{v}_{p}+c v_{p}=F \sin \omega t, \text { where } \omega=\pi / t_{d}\label{eqn:1.8} \]
To find a particular \(v_p(t)\) that satisfies ODE Equation \(\ref{eqn:1.8}\), we apply the method of undetermined coefficients, which entails making an educated guess of the functional character of the solution, using multiplicative coefficients that will be determined by substituting the candidate solution back into ODE Equation \(\ref{eqn:1.8}\). The right-hand-side sine function of ODE Equation \(\ref{eqn:1.8}\) has a finite set of derivatives: the derivative of a sine is a cosine, the derivative of a cosine is a sine, etc. Therefore, we assume a form of solution consisting of a linear sum of the function and all of its derivatives:
\[v_{p}(t)=P_{1} \sin \omega t+P_{2} \cos \omega t, \nonumber \]
with coefficients \(P_1\) and \(P_2\) undetermined at this stage. Substitute this candidate solution back into ODE Equation \(\ref{eqn:1.8}\):
\[m \omega\left(P_{1} \cos \omega t-P_{2} \sin \omega t\right)+c\left(P_{1} \sin \omega t+P_{2} \cos \omega t\right)=F \sin \omega t \nonumber \]
Collect terms that multiply \(\sin\omega t\) and \(\cos\omega t\) on both sides of the equation:
\[\left(-m \omega P_{2}+c P_{1}\right) \sin \omega t+\left(m \omega P_{1}+c P_{2}\right) \cos \omega t=(F) \sin \omega t+(0) \cos \omega t \nonumber \]
Functions \(\sin\omega t\) and \(\cos\omega t\) are linearly independent of each other, which requires that the left-hand-side and right-hand-side terms multiplying \(\sin\omega t\) must equal each other, and the same for the terms multiplying cosωt , leading to two algebraic equations for the coefficients \(P_1\) and \(P_2\):
\[c P_{1}-m \omega P_{2}=F \quad \text { and } \quad m \omega P_{1}+c P_{2}=0 \nonumber \]
The second equation gives \(P_2=-(m\omega/c)P_1\), and substituting this into the first equation to eliminate \(P_2\) leads to:
\[P_{1}=\frac{c F}{(m \omega)^{2}+c^{2}} \quad \text { and } \quad P_{2}=\frac{-m \omega}{c} P_{1}\label{eqn:1.9} \]
Rather than write out messy algebraic formulas for all the coefficients in this problem, it is convenient to express all others in terms of \(P_1\) and \(P_2\), as is in Equation \(\ref{eqn:1.9}\).
To obtain the complete solution for the pulse duration, 0 \(\leq\) \(t\) \(\leq\) \(t_d\), we now combine the homogeneous and particular solutions:
\[v(t)=v_{h}(t)+v_{p}(t)=C e^{-(c / m) t}+P_{1} \sin \omega t+P_{2} \cos \omega t, \text { for } 0 \leq t \leq t_{d}\label{eqn:1.10} \]
Coefficient \(C\) in Equation \(\ref{eqn:1.10}\) is still not known; but now, finally, we can apply the initial condition (IC) to determine \(C\):
\[v(0)=v_{0}=C(1)+P_{1}(0)+P_{2}(1) \Rightarrow C=v_{0}-P_{2}=v_{0}+(m \omega / c) P_{1}\label{eqn:1.11} \]
Equations \(\ref{eqn:1.9}\) through \(\ref{eqn:1.11}\) describe the velocity response during the pulse duration, 0 \(\leq\) \(t\) \(\leq\) \(t_d\), so we still need to find the post-pulse response, for \(t_d\) < \(t\). To do so, we should recognize two facts: (1) \(f_x(t)\) = 0 for \(t_d\) < \(t\); and (2) velocity \(v(t)\) cannot suddenly change at \(t\) = \(t_d\) (because acceleration cannot be infinite), rather, velocity must equal Equation \(\ref{eqn:1.10}\) evaluated at \(t\) = \(t_d\). Fact 1 means that the ODE for \(t_d\) < \(t\) is homogeneous; hence, the particular solution is zero, and we have only a homogeneous solution, but now with a different coefficient, \(D\), than before:
\[v(t)=D e^{-(c / m) t}, \text { for } t_{d}<t\label{eqn:1.12} \]
To find \(D\), we use Fact 2, which essentially is the IC for \(t_d\) < \(t\), and Equation \(\ref{eqn:1.10}\):
\[D e^{-(c / m) t_{d}}=v\left(t_{d}\right)=C e^{-(c / m) t_{d}}+P_{1} \sin \omega t_{d}+P_{2} \cos \omega t_{d}\label{eqn:1.13} \]
\[\Rightarrow \quad D=v\left(t_{d}\right) e^{(c / m) t_{d}} \nonumber \]
\[\Rightarrow \quad v(t)=v\left(t_{d}\right) e^{-\frac{c}{m}\left(t-t_{d}\right)}, \text { for } t_{d}<t \label{eqn:1.14} \]
Equation \(\ref{eqn:1.14}\), with Equation \(\ref{eqn:1.13}\) for \(v(t_d)\), combined with Equation \(\ref{eqn:1.9}\) and Equation \(\ref{eqn:1.11}\) for coefficients \(P_1\), \(P_2\) and \(C\), represents the response for \(t_d\) < \(t\). Because mass \(m\) and viscous damping constant \(c\) are positive physical quantities, Equation \(\ref{eqn:1.14}\) is a pure exponential decay, which approaches zero as \(t \rightarrow \inf\).