1.6: The Mass-Damper System III - Numerical and Graphical Evaluation of Time Response using MATLAB
- Page ID
- 21143

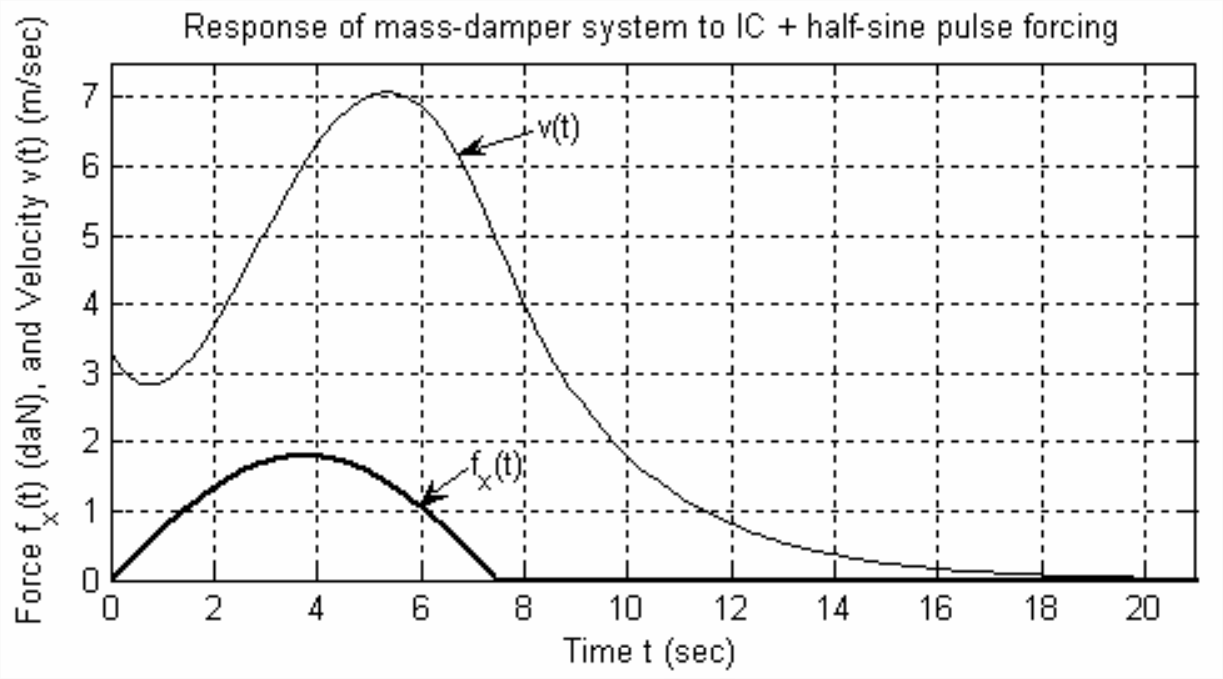
For the mass-damper response solution developed in the previous section, consider the following numerical case, with all quantities expressed in SI units: \(m\) = 5 kg, \(c\) = 2 N-s/m, \(F\) = 18 N, \(t_d\) = 7.5 s, \(v_0\) = 3.3 m/s. A MATLAB script M-file, named MATLABdemo11.m, to calculate and graph the response from 0 to 25 seconds is given below. The MATLAB commands are supplemented with explanatory comments, so you should be able to follow and understand the M-file without much difficulty. Writing comments in this manner is good practice for your own programs; comments added while you are writing a computer program are especially helpful if you need to revise or refer back to the program long after you have forgotten the details.
To execute in MATLAB an M-file that is stored on a folder (directory) of your computer’s hard disk, you must have added that folder to the so-called MATLABpath. In Versions 6 and higher of MATLAB, you can add the folder to the MATLABpath by specifying the folder as the “Current Directory” in the formatting toolbar above the MATLAB command window. The command line below executes the script M-file.
MATLAB command:
>> MATLABdemo11
The resulting MATLAB (Versions 6 and higher) graph is Figure \(\PageIndex{1}\). The graph was edited in the MATLAB figure window, mainly to reduce the size and to add curve labels and arrows.
Note that the unit of force “daN” on Figure \(\PageIndex{1}\) is a deka-newton, which means 10 newtons. All of the mechanical units used in this book are described in Chapter 3.