
3.3: Reaction Wheel
- Page ID
- 7637

Reaction wheels are used for attitude control of spacecraft. The principal component of a reaction wheel is a rotor, the “wheel,” which is normally either not spinning or spinning at a constant nonzero rotational velocity. When a motor increases or decreases the rotational velocity from the normal value, a control moment is imposed upon the vehicle to which the reaction wheel is attached.
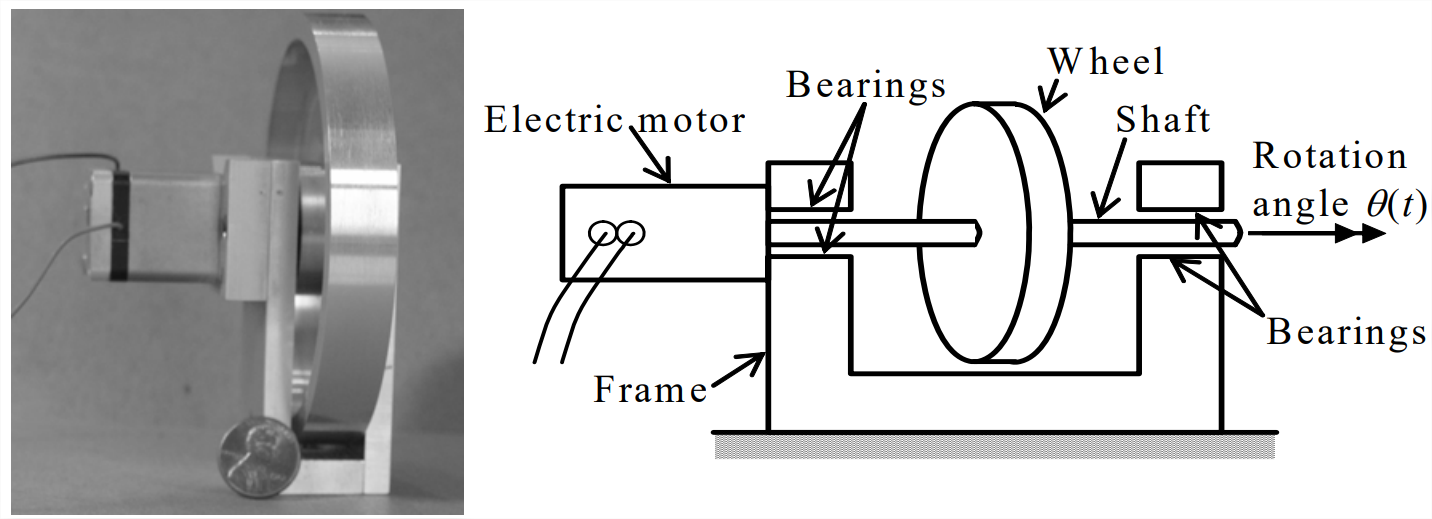
The reaction-wheel assembly drawn in Figure \(\PageIndex{1}\) is a small laboratory device used in experimental research. Its basic functioning is the same as that of a flight-qualified reaction-wheel assembly. The rotating members are the wheel, the shaft, and the rotor of the motor. We denote their combined rotational inertia about the shaft axis as \(J\), also called moment of inertia. The shaft is held in bearings, which are lubricated, but nevertheless impose a drag moment. The rotation angle of the rotating members is denoted \(\theta(t)\), and it is represented graphically in Figure \(\PageIndex{1}\) by a double-headed arrow and the right-hand rule giving the polarity of rotation. The rotational velocity (angular velocity, spin rate) is denoted \(\dot{\theta}(t) \equiv p(t)\), a symbol commonly used for angular velocity in aeronautical applications.
We will idealize the drag moment as having the linear viscous form \(c_{\theta} \times p(t)\), where \(c_{\theta}\) is the rotational viscous damping constant, which can be measured on real hardware. Also, we will denote as \(M_{m}(t)\) the torque imposed on the rotating members by the electric motor, this torque being an independent input quantity.
The drawing below is the free-body diagram (FBD) of all moments (torques in this case) acting on the rotating members, with the bearing drag shown as a single torque, even though it is actually distributed over all bearing surfaces:
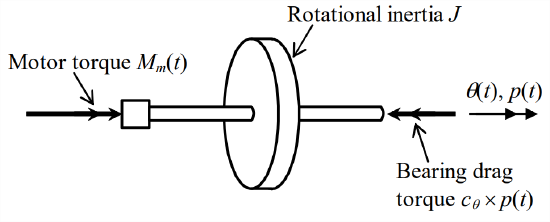
In order to derive the equation of motion, we write Newton’s 2nd law for rotation about the shaft axis, based upon the FBD:
\[\Sigma(\text { Moments })_{\text {about shaff axis }}=(\text { rotational inertia }) \times(\text { rotational acceleration })_{\text {about shaft axis }} \nonumber \]
\[M_{m}(t)-c_{\theta} p=J \dot{p} \quad \Rightarrow \quad J \dot{p}+c_{\theta} p=M_{m}(t)\label{eqn:3.1} \]
Converting Equation \(\ref{eqn:3.1}\) into the standard 1st order form gives
\[\dot{p}-\left(-\frac{c_{\theta}}{J}\right) p=\frac{1}{J} M_{m}(t) \Rightarrow \dot{p}-a p=b M_{m}(t) \quad \text { where } a=-\frac{c_{\theta}}{J} \text { and } b=\frac{1}{J}\label{eqn:3.2} \]