
2.1: Locomotion and Manipulation Examples
- Page ID
- 14774

Locomotion includes very different concepts of motion including rolling, walking, running, jumping, sliding (undulatory locomotion), crawling, climbing, swimming, and flying. They are drastically different in terms of energy consumption, kinematics, stability, and capabilities required by the robot that implements them. Yet, the above definitions are loose and ambiguous: for example, “swimming” can be done using many different forms of propulsion systems. Similarly, a sliding motion on the ground might result into swimming with only few modifications.
The way in which the individual parts of a robot can move with respect to each other and the environment is called the kinematics of the robot. Kinematics are only concerned with the position and speed (first derivative of position) of those parts, but not its dynamics, which include acceleration (second derivative of position) and jerk (third derivative of position).
Commercially, the most dominant form of locomotion is rolling. This is due to the fact that rolling provides by far the most efficient energy-speed ratio (Figure 2.1), making the invention of the wheel one of the greatest technological breakthroughs in history. Consequently, humans have modified their environment to have smooth surfaces of large extent such as the road network, but also warehouse and residential floors. In contrast, evolution has not evolved a single animal with wheel-like actuators.
Query
Can you find examples of robots from the above categories? Identify the different types of actuators that are used in them.
Due to the dominance of rolling robots, the electric motor is among the most popular actuators. Except for the stepper motor, which uses large electromagnets to rotate an internal spindle by a few degrees every time, the physics of the electrical motor requires it to revolve at very high speeds (multiple thousand rotations per minute). Therefore, motors are almost always used in conjunction with gears to reduce the speed and increase the torque, that is the force that the motor can exert to rotate an axis. In order to be able to measure the number of revolutions and the axis’ position, motors are also often combined with rotary encoders. Motors that combine an electric motor with a gear-box, encoder, and controller to move toward desired position are known as servo motors, and are popular among hobbyists. Another popular class of actuator, in particular for legged robots, are linear actuators, that might exist in electric, pneumatic or hydraulic form. Finally, there exist a wide array of specialty actuators such as Shape-Memory Alloys, Electroactive Polymers or Piezo-elements, which often allow for extreme miniaturization, but do not provide attractive energyto-force ratios and are difficult to control.
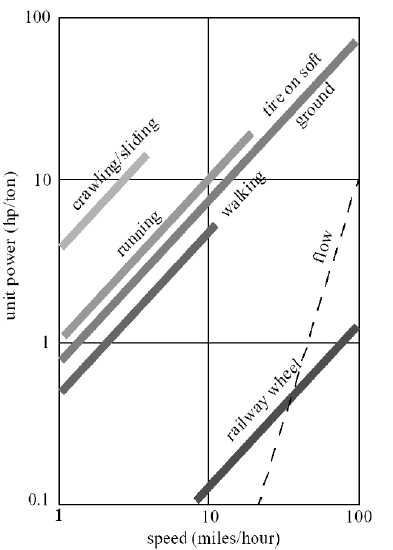
Figure \(PageIndex{1}\): Power consumption vs. speed for various means of loco-
motion. From Todd (1985).
Most actuators (and mechanisms) capable of locomotion can also be used for manipulation with only minor modifications. Most industrial manipulators consist of a chain of rotary actuators that are connected by links. Most industrial robots have six or more independently rotating axes. We will see why further down below. Modern industrial manipulators have the ability to not only control the position of each of its joints, but precisely control the torque and force at each individual joint, making the arm arbitrary compliant, which is the inverse of stiffness in a mechanical sense. For dexterous manipulation a robot does not only need an arm, but also a gripper or hand. Grasping is a hard problem on its own and deserves its own chapter.