
2.2: Static and Dynamic Stability
- Page ID
- 14775

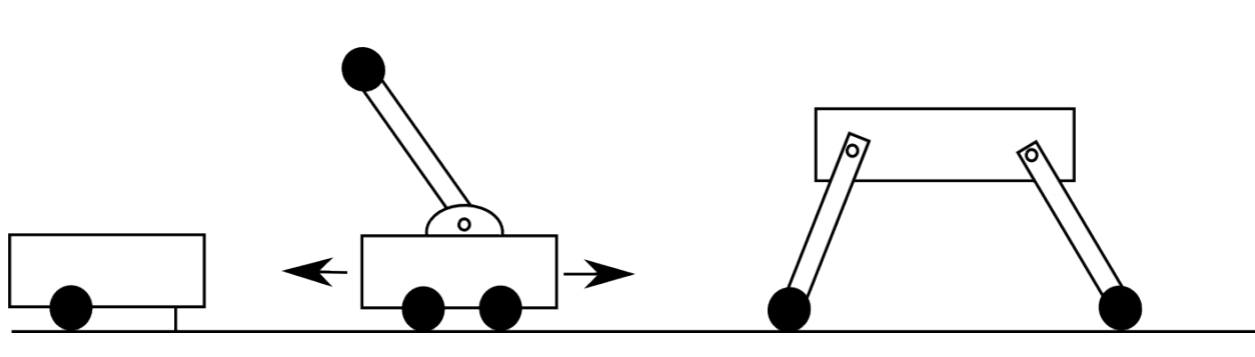
A fundamental difference between locomotion mechanisms is whether they are statically or dynamically stable. A statically stable mechanism will not fall even when all of its joints freeze (Figure 2.2.1, left). A dynamically stable robot instead requires constant motion to prevent it from falling. Technically, stability requires the robot to keep its center of mass to fall within the polygon spanned by its ground-contact points. For example a quadruped robot’s feet span a rectangle. Once such a robot lifts one of its feet, this rectangle becomes a triangle. If the projection of the center of mass of the robot along the direction of gravity is outside of this triangle, the robot will fall. A dynamically stable robot can overcome this problem by changing its configuration so rapidly that a fall is prevented. An example of a purely dynamically stable robot is an inverted pendulum on a cart (Figure 2.2.1, middle). Such a robot has no statically stable configurations and needs to keep moving all the time to keep the pendulum upright. While dynamic stability is desirable for high-speed, agile motions, robots should be designed so that they can easily switch into a statically stable configuration (Figure 2.2.1, right).
An example of a robot that has both statically and dynamically stable configurations is a quadruped (“four legs”) runner. Unlike walking, a running robot will always have two legs in the air and alternate between them faster than the robot could fall in either direction. Although statically stable walking is possible with only 4 legs, most animals (and robots) require 6 legs for statically stable walking and use dynamically stable gaits (such as galloping) when they have four legs. Six legs allow the animal to move three legs at a time while the three other legs maintain a stable pose.