
3.6: Derivation of Constitutive Equations for Plates (Advanced)
- Page ID
- 21488
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)For convenience, the set of equations necessary to derive the elasticity law for plates is summarized below.
Hook’s law in plane stress reads:
\[\sigma_{\alpha \beta} = \frac{E}{1 − \nu^2} [(1 − \nu)\epsilon_{\alpha \beta} + \nu\epsilon_{\gamma \gamma}\delta_{\alpha \beta}] \label{4.54} \]
In terms of components:
\[\sigma_{xx} = \frac{E}{1 − \nu^2}(\epsilon_{xx} + \nu\epsilon_{yy})\]
\[\sigma_{yy} = \frac{E}{1 − \nu^2}(\epsilon_{yy} + \nu\epsilon_{xx})\]
\[\sigma_{xy} = \frac{E}{1 − \nu} \epsilon_{xy}\]
Here, strain tensor can be obtained from the strain-displacement relations:
\[\epsilon_{\alpha \beta} = \epsilon_{\alpha \beta}^{\circ} + z\kappa_{\alpha \beta}\]
Now, define the tensor of bending moment:
\[M_{\alpha \beta} \equiv \int_{-\frac{h}{2}}^{\frac{h}{2}} \sigma_{\alpha \beta}z dz \label{4.57}\]
and the tensor of axial force (membrane force):
\[N_{\alpha \beta} \equiv \int_{-\frac{h}{2}}^{\frac{h}{2}} \sigma_{\alpha \beta}z dz\]
Bending Moments and Bending Energy
The bending moment \(M_{\alpha \beta}\) is now calculated by substituting Equation \ref{4.54} with Equation \ref{4.57}
\[M_{\alpha \beta} = \frac{E}{1 − \nu^2} \int_{-\frac{h}{2}}^{\frac{h}{2}} [(1 − \nu)\epsilon_{\alpha \beta} + \nu\epsilon_{\gamma \gamma}\delta_{\alpha \beta}] z dz \\ = \frac{E}{1 − \nu^2} [(1 − \nu)\epsilon_{\alpha \beta}^{\circ} + \nu\epsilon_{\gamma \gamma}^{\circ}\delta_{\alpha \beta}] \int_{-\frac{h}{2}}^{\frac{h}{2}} z dz \\ + \frac{E}{1 − \nu^2} [(1 − \nu)\kappa_{\alpha \beta} + \nu\kappa_{\gamma \gamma}\delta_{\alpha \beta}] \int_{-\frac{h}{2}}^{\frac{h}{2}} z^2 dz \\ = \frac{Eh^3}{12(1 − \nu^2)} [(1 − \nu)\kappa_{\alpha \beta} + \nu\kappa_{\gamma \gamma}\delta_{\alpha \beta}]\]
Note that the term \(\int_{-\frac{h}{2}}^{\frac{h}{2}} z dz \) is zero, as shown in the case of beams. Therefore there are no mid-surface strains \(\epsilon_{\alpha \beta}^{\circ}\) entering the moment-curvature relation.
Here we define the bending rigidity of a plate \(D\) as follows:
\[D = \frac{Eh^3}{12(1 − \nu^2)}\]
Now, one gets the moment-curvature relations in the tensorial form
\[\boxed{ M_{\alpha \beta} = D[(1 − \nu)\kappa_{\alpha \beta} + \nu\kappa_{\gamma \gamma}\delta_{\alpha \beta}] }\label{4.61}\]
\[M_{\alpha \beta} = \begin{vmatrix} M_{11} & M_{22} \\ M_{21} & M_{22} \end{vmatrix}\]
where \(M_{12} = M_{21}\) due to symmetry. In the expanded notation,
\[M_{11} = D(\kappa_{11} + \nu\kappa_{22})\]
\[M_{22} = D(\kappa_{22} + \nu\kappa_{11})\]
\[M_{12} = D(1 - \nu)\kappa_{12})\]
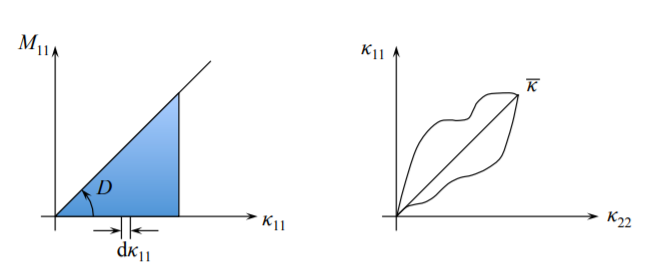
One-dimensional Bending Energy Density
Here, we use the hat notation for a function of certain argument, such as:
\[M_{11} = \hat{M}_{11}(\kappa_{11}) \\ = D\kappa_{11}\]
Then, the bending energy density \(\tilde U_b \) reads:
\[\bar U_b = \int_{0}^{\bar{\kappa}} \hat{M}_{11}(\kappa_{11}) d\kappa_{11} \\ = D \int^{\bar{\kappa}_{11}} \kappa_{11} d\kappa_{11} \\ = \frac{1}{2}D(\bar{\kappa}_{11})^2\]
\[\bar U_b = \frac{1}{2}M_{11}\bar{\kappa}_{11}\]
General Case
General definition of the bending energy density reads:
\[\bar U_b = \oint M_{\alpha \beta} d\kappa_{\alpha \beta}\]
where the symbol \(\oint\) denotes integration along a certain loading path.
Let’s calculate the energy density stored when the curvature reaches a given value \(\bar{\kappa}_{\alpha \beta}\) along a straight loading path:
\[\kappa_{\alpha \beta} = \eta \bar{\kappa}_{\alpha \beta}\]
\[d\kappa_{\alpha \beta} = \bar{\kappa}_{\alpha \beta}d\eta\]
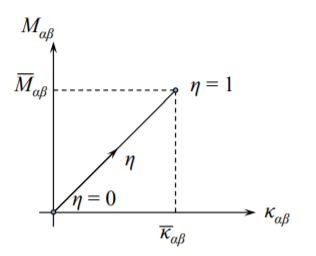
From the linearity of the moment-curvature relation, Equation \ref{4.61}, it follows that
\[M_{\alpha \beta} = \hat{M}_{\alpha \beta}(\kappa_{\alpha \beta}) \\ = \hat{M}_{\alpha \beta}(\eta\bar{\kappa}_{\alpha \beta}) \\ = \eta\hat{M}_{\alpha \beta}(\bar{\kappa}_{\alpha \beta})\]
where \(\hat{M}_{\alpha \beta}(\kappa_{\alpha \beta})\) is a homogenous function of degree one.
\[\bar U_b = \oint \hat{M}_{\alpha \beta}(\kappa_{\alpha \beta}) d\kappa_{\alpha \beta} \\ \int_{0}^{1} \eta \hat{M}_{\alpha \beta}(\bar{\kappa}_{\alpha \beta})\bar{\kappa}_{\alpha \beta}d\eta \\ = \hat{M}_{\alpha \beta}(\bar{\kappa}_{\alpha \beta})\bar{\kappa}_{\alpha \beta} \int_{0}^{1} \eta d\eta \\ \frac{1}{2} \hat{M}_{\alpha \beta}(\bar{\kappa}_{\alpha \beta})\bar{\kappa}_{\alpha \beta} \\ = \frac{1}{2} M_{\alpha \beta} \bar{\kappa}_{\alpha \beta}\]
Now, the bending energy density reads
\[\bar U_b = \frac{D}{2} [(1 − \nu)\bar{\kappa}_{\alpha \beta} + \nu\bar{\kappa}_{\gamma \gamma}\delta_{\alpha \beta}] \bar{\kappa}_{\alpha \beta} \\ = \frac{D}{2} [(1 − \nu)\bar{\kappa}_{\alpha \beta}\bar{\kappa}_{\alpha \beta} + \nu\bar{\kappa}_{\gamma \gamma}\bar{\kappa}_{\alpha \beta}\delta_{\alpha \beta}] \\ = \frac{D}{2} [(1 − \nu)\bar{\kappa}_{\alpha \beta}\bar{\kappa}_{\alpha \beta} - \nu(\bar{\kappa}_{\gamma \gamma})^2]\]
The bending energy density expressed in terms of components are:
\[\bar U_b = \frac{D}{2} \{(1 - \nu)[(\bar{\kappa}_{11})^2 + 2(\bar{\kappa}_{12})^2 + (\bar{\kappa}_{22})^2] + \nu(\bar{\kappa}_{11} + \bar{\kappa}_{22})^2\} \\ = \frac{D}{2} \{(1 - \nu) [(\bar{\kappa}_{11} + \bar{\kappa}_{22})^2 - 2\bar{\kappa}_{11}\bar{\kappa}_{22}+ 2(\bar{\kappa}_{12})^2 ] + \nu(\bar{\kappa}_{11} + \bar{\kappa}_{22})^2\} \\ = \frac{D}{2} \{(\bar{\kappa}_{11} + \bar{\kappa}_{22})^2 - 2\bar{\kappa}_{11}\bar{\kappa}_{22}+ 2(\bar{\kappa}_{12})^2 - \nu[-2\bar{\kappa}_{11}\bar{\kappa}_{22}+ 2(\bar{\kappa}_{12})^2]\} \\ = \frac{D}{2} \{(\bar{\kappa}_{11} + \bar{\kappa}_{22})^2 - 2\bar{\kappa}_{11}\bar{\kappa}_{22}+ 2(\bar{\kappa}_{12})^2 - \nu[-2\bar{\kappa}_{11}\bar{\kappa}_{22}+ 2(\bar{\kappa}_{12})^2]\} \\ = \frac{D}{2} \{(\bar{\kappa}_{11} + \bar{\kappa}_{22})^2 + 2(1-\nu) [-\bar{\kappa}_{11}\bar{\kappa}_{22}+ (\bar{\kappa}_{12})^2]\} \]
\[\boxed{\bar U_b = \frac{D}{2} \{(\bar{\kappa}_{11} + \bar{\kappa}_{22})^2 - 2(1 - \nu)[\bar{\kappa}_{11}\bar{\kappa}_{22} - (\bar{\kappa}_{12})^2]\}}\]
The term in the square brackets is the Gaussian curvature, \(\kappa_G\), introduced in Chapter 1, Equation (1.8.9). Should the Gaussian curvature vanish, as it is often the case in plates, then the bending energy density assumes a very simple form \(\bar U_b = \frac{1}{2} D(\bar{\kappa}_{11} + \bar{\kappa}_{22})^2\).
Total Bending Energy
The total bending energy is the integral of the bending energy density over the area of plate:
\[U_b = \int_{S} \bar{U}_b dA\]
Membrane Forces and Membrane Energy
The axial force can be calculated in a similar way as before
\[N_{\alpha \beta} = \frac{E}{1 − \nu^2} \int_{-\frac{h}{2}}^{\frac{h}{2}} [(1 − \nu)\epsilon_{\alpha \beta} + \nu\epsilon_{\gamma \gamma}\delta_{\alpha \beta}] dz \\ = \frac{E}{1 − \nu^2} \int_{-\frac{h}{2}}^{\frac{h}{2}} [(1 − \nu)\epsilon_{\alpha \beta}^{\circ} + \nu\epsilon_{\gamma \gamma}^{\circ}\delta_{\alpha \beta}] dz \\ + \frac{E}{1 − \nu^2} \int_{-\frac{h}{2}}^{\frac{h}{2}} [(1 − \nu)\kappa_{\alpha \beta} + \nu\kappa_{\gamma \gamma}\delta_{\alpha \beta}] z dz \\ = \frac{E}{1 − \nu^2} [(1 − \nu)\epsilon_{\alpha \beta}^{\circ} + \nu\epsilon_{\gamma \gamma}^{\circ}\delta_{\alpha \beta}] \int_{-\frac{h}{2}}^{\frac{h}{2}} dz \\ + \frac{E}{1 − \nu^2} [(1 − \nu)\kappa_{\alpha \beta} + \nu\kappa_{\gamma \gamma}\delta_{\alpha \beta}] \int_{-\frac{h}{2}}^{\frac{h}{2}} dz \\ = \frac{Eh}{1 − \nu^2} [(1 − \nu)\epsilon_{\alpha \beta}^{\circ} + \gamma\epsilon_{\gamma \gamma}^{\circ}\delta_{\alpha \beta}]\]
The integral \(\int_{-\frac{h}{2}}^{\frac{h}{2}} z dz\) is zero which means that there is no coupling between the membrane force and curvatures.
Here we define the axial rigidity of a plate \(C\) as follows:
\[C = \frac{Eh}{1 − ν^2}\]
Now, one gets the membrane force-extension relation in the tensor notation:
\[\boxed{N_{\alpha \beta} = C[(1 − \nu)\epsilon_{\alpha \beta}^{\circ} + \nu\epsilon_{\gamma \gamma}^{\circ}\delta_{\alpha \beta}]}\]
\[N_{\alpha \beta} = \begin{vmatrix} N_{11} & N_{12} \\ N_{21} & N_{22} \end{vmatrix}\]
where \(N_{12} = N_{21}\) due to symmetry. In components,
\[N_{11} = C(\epsilon_{11}^{\circ} + \nu\epsilon_{22}^{\circ})\]
\[N_{22} = C(\epsilon_{22}^{\circ} + \nu\epsilon_{11}^{\circ})\]
\[N_{12} = C(1 - \nu) \epsilon_{11}^{\circ}\]
Membrane Energy Density
Using the similar definition used in the calculation of the bending energy density, the extension energy (membrane energy) reads:
\[\bar {U}_m = \oint N_{\alpha \beta} d\epsilon_{\alpha \beta}^{\circ}\]
Let’s calculate the energy stored when the extension reaches a given value \(\bar{\epsilon}_{\alpha \beta}^{\circ}\). Consider a straight path:
\[\epsilon_{\alpha \beta}^{\circ} = \eta\bar{\epsilon}_{\alpha \beta}^{\circ}\]
\[d\epsilon_{\alpha \beta}^{\circ} = \bar{\epsilon}_{\alpha \beta}^{\circ} d\eta\]
\[N_{\alpha \beta} = \hat{N}_{\alpha \beta}(\epsilon_{\alpha \beta}^{\circ}) \\ = \hat{N}_{\alpha \beta}(\eta\bar{\epsilon}_{\alpha \beta}^{\circ}) \\ = \eta\hat{N}_{\alpha \beta}(\bar{\epsilon}_{\alpha \beta}^{\circ})\]
where \(\hat{N}_{\alpha \beta}(\epsilon_{\alpha \beta}^{\circ})\) is a homogenous function of degree one.
\[\bar{U}_m = \int_{0}^{\bar{\epsilon}_{\alpha \beta}^{\circ}} \hat{N}_{\alpha \beta} (\epsilon_{\alpha \beta}^{\circ} ) d \epsilon_{\alpha \beta}^{\circ} \\ = \int_{0}^{1} \eta \hat{N}_{\alpha \beta} (\bar{\epsilon}_{\alpha \beta}^{\circ} ) \bar{\epsilon}_{\alpha \beta}^{\circ} d \eta \\
= \frac{1}{2} \hat{N}_{\alpha \beta} ( \bar{\epsilon}_{\alpha \beta}^{\circ} ) \bar{\epsilon}_{\alpha \beta}^{\circ} \\
= \frac{1}{2} N_{\alpha \beta} \bar{\epsilon}_{\alpha \beta}^{\circ}\]
Now, the extension energy reads:
\[\tilde{U}_m = \frac{C}{2} [(1-\nu) \bar{\epsilon}_{\alpha \beta}^{\circ} + \nu \bar{\epsilon}_{\gamma \gamma}^{\circ} \delta_{\alpha \beta} ] \bar{\epsilon}_{\alpha \beta}^{\circ} \\ = \frac{C}{2} [ (1-\nu) \bar{\epsilon}_{\alpha \beta}^{\circ} \bar{\epsilon}_{\alpha \beta}^{\circ} + \nu ( \bar{\epsilon}_{\gamma \gamma}^{\circ} )^{2} ] \]
The extension energy density expressed in terms of components is:
\[\bar{U}_m = \frac{C}{2} \{ (1-\nu) [ ( \bar{\epsilon}_{11}^{\circ})^{2} + 2 (\bar{\epsilon}_{12}^{\circ})^{2} + (\bar{\epsilon}_{22}^{\circ})^{2}] + \nu ( \bar{\epsilon}_{11}^{\circ}+\bar{\epsilon}_{22}^{\circ} )^{2} \} \\
= \frac{C}{2} \{(1-\nu) [ ( \bar{\epsilon}_{11}^{\circ} + \bar{\epsilon}_{22}^{\circ} )^{2} - 2 \bar{\epsilon}_{11}^{\circ} \bar{\epsilon}_{22}^{\circ}+2 ( \bar{\epsilon}_{12}^{\circ} )^{2} ] + \nu ( \bar{\epsilon}_{11}^{\circ}+\bar{\epsilon}_{22}^{\circ} )^{2} \} \\
= \frac{C}{2} \{ ( \bar{\epsilon}_{11}^{\circ} + \bar{\epsilon}_{22}^{\circ})^{2} - 2 \bar{\epsilon}_{11}^{\circ} \bar{\epsilon}_{22}^{\circ} + 2 (\bar{\epsilon}_{12}^{\circ})^{2}-\nu [-2 \bar{\epsilon}_{11}^{\circ} \bar{\epsilon}_{22}^{\circ} + 2 ( \bar{\epsilon}_{12}^{\circ} )^{2} ] \} \\
=\frac{C}{2} \{ ( \bar{\epsilon}_{11}^{\circ} + \bar{\epsilon}_{22}^{\circ} )^{2} + 2(1-\nu) [ -\bar{\epsilon}_{11}^{\circ} \bar{\epsilon}_{22}^{\circ} + ( \bar{\epsilon}_{12}^{\circ} )^{2} ] \}\]
\[\boxed{\bar{U}_m = \frac{C}{2} \{ (\bar{\epsilon}_{11}^{\circ} + \bar{\epsilon}_{22}^{\circ} )^{2} - 2(1-\nu) [\bar{\epsilon}_{11}^{\circ} \bar{\epsilon}_{22}^{\circ} - (\bar{\epsilon}_{12}^{\circ} )^{2} ] \} }\]
The total membrane energy is the integral of the membrane energy density over the area of plate:
\[U_m = \int_{S} \bar{U}_m dS\]