
2.6: Applying Redundancy to Software and Data
- Page ID
- 58502

The examples of redundancy and replication in the previous sections all involve hardware. A seemingly obvious next step is to apply the same techniques to software and to data. In the case of software the goal is to reduce the impact of programming errors, while in the case of data the goal is to reduce the impact of any kind of hardware, software, or operational error that might affect its integrity. This section begins the exploration of several applicable techniques: \(N\)-version programming, valid construction, and building a firewall to separate stored state into two categories: a state whose integrity must be preserved and a state that can casually be abandoned because it is easy to reconstruct.
Tolerating Software Faults
Simply running three copies of the same buggy program is likely to produce three identical incorrect results. NMR requires independence among the replicas, so the designer needs a way of introducing that independence. An example of a way of introducing independence is found in the replication strategy for the root name servers of the Internet Domain Name System (DNS). Over the years, slightly different implementations of the DNS software have evolved for different operating systems, so the root name server replicas intentionally employ these different implementations to reduce the risk of replicated errors.
To try to harness this idea more systematically, one can commission several teams of programmers and ask each team to write a complete version of an application according to a single set of specifications. Then, run these several versions in parallel and compare their outputs. The hope is that the inevitable programming errors in the different versions will be independent and voting will produce a reliable system. Experiments with this technique, known as \(\bf{N}\)-version programming, suggest that the necessary independence is hard to achieve. Different programmers may be trained in similar enough ways that they make the same mistakes. Use of the same implementation language may encourage the same errors. Ambiguities in the specification may be misinterpreted in the same way by more than one team and the specification itself may contain errors. Finally, it is hard to write a specification in enough detail that the outputs of different implementations can be expected to be bit-for-bit identical. The result is that after much effort, the technique may still mask only a certain class of bugs and leave others unmasked. Nevertheless, there are reports that \(N\)-version programming has been used, apparently with success, in at least two safety-critical aerospace systems: the flight control system of the Boeing 777 aircraft (with \(N = 3\)) and the on-board control system for the Space Shuttle (with \(N = 2\)).
Incidentally, the strategy of employing multiple design teams can also be applied to hardware replicas, with a goal of increasing the independence of the replicas by reducing the chance of replicated design errors and systematic manufacturing defects.
Much of software engineering is devoted to a different approach: devising specification and programming techniques that avoid faults in the first place and test techniques that systematically root out faults so that they can be repaired once and for all before deploying the software. This approach, sometimes called valid construction, can dramatically reduce the number of software faults in a delivered system, but because it is difficult both to completely specify and to completely test a system, some faults inevitably remain. Valid construction is based on the observation that software, unlike hardware, is not subject to wear and tear, so if it is once made correct, it should stay that way. Unfortunately, this observation can turn out to be wishful thinking, first because it is hard to make software correct, and second because it is nearly always necessary to make changes after installing a program because the requirements, the environment surrounding the program, or both, have changed. There is thus a potential for tension between valid construction and the principle that one should design for iteration.
Worse, later maintainers and reworkers often do not have a complete understanding of the ground rules that went into the original design, so their work is likely to introduce new faults for which the original designers did not anticipate providing tests. Even if the original design is completely understood, when a system is modified to add features that were not originally planned, the original ground rules may be subjected to some violence. Software faults more easily creep into areas that lack systematic design.
Tolerating Software (and other) Faults by Separating State
Designers of reliable systems usually assume that, despite the best efforts of programmers there will always be a residue of software faults, just as there is also always a residue of hardware, operation, and environment faults. The response is to develop a strategy for tolerating all of them. Software adds the complication that the current state of a running program tends to be widely distributed. Parts of that state may be in non-volatile storage, while other parts are in temporary variables held in volatile memory locations, processor registers, and kernel tables. This wide distribution of state makes containment of errors problematic. As a result, when an error occurs, any strategy that involves stopping some collection of running threads, tinkering to repair the current state (perhaps at the same time replacing a buggy program module), and then resuming the stopped threads is usually unrealistic.
In the face of these observations, a programming discipline has proven to be effective: systematically divide the current state of a running program into two mutually exclusive categories and separate the two categories with a firewall. The two categories are:
- State that the system can safely abandon in the event of a failure.
- State whose integrity the system should preserve despite failure.
Upon detecting a failure, the plan becomes to abandon all state in the first category and instead concentrate just on maintaining the integrity of the data in the second category. An important part of the strategy is an important sweeping simplification: classify the state of running threads (that is, the thread table, stacks, and registers) as abandonable. When a failure occurs, the system abandons the thread or threads that were running at the time and instead expects a restart procedure, the system operator, or the individual user to start a new set of threads with a clean slate. The new thread or threads can then, working with only the data found in the second category, verify the integrity of that data and return to normal operation. The primary challenge then becomes to build a firewall that can protect the integrity of the second category of data despite the failure.
The designer can base a natural firewall on the common implementations of volatile (e.g., CMOS memory) and non-volatile (e.g., magnetic disk) storage. As it happens, writing to non-volatile storage usually involves mechanical movement such as rotation of a disk platter, so most transfers move large blocks of data to a limited region of addresses, using a GET / PUT interface. On the other hand, volatile storage technologies typically provide a READ / WRITE interface that allows rapid-fire writes to memory addresses chosen at random, so failures that originate in or propagate to software tend to quickly and untraceably corrupt random-access data. By the time an error is detected the software may thus have already damaged a large and unidentifiable part of the data in volatile memory. The GET / PUT interface instead acts as a bottleneck on the rate of spread of data corruption. The goal can be succinctly stated: to detect failures and stop the system before it reaches the next PUT operation, thus making the volatile storage medium the error containment boundary. It is only incidental that volatile storage usually has a READ / WRITE interface, while non-volatile storage usually has a GET / PUT interface, but because that is usually true it becomes a convenient way to implement and describe the firewall.
This technique is widely used in systems whose primary purpose is to manage long-lived data. In those systems, two aspects are involved:
- Prepare for failure by recognizing that all state in volatile memory devices can vanish at any instant, without warning. When it does vanish, automatically launch new threads that start by restoring the data in non-volatile storage to a consistent, easily described state. The techniques to do this restoration are called recovery. Doing recovery systematically involves atomicity, which is explored in Chapter 3.
- Protect the data in non-volatile storage using replication, thus creating the class of storage known as durable storage. Replicating data can be a straightforward application of redundancy, so we will begin the topic in this chapter. However, there are more effective designs that make use of atomicity and geographical separation of replicas, so we will revisit durability in Chapter 4.
When the volatile storage medium is CMOS RAM and the non-volatile storage medium is magnetic disk, following this programming discipline is relatively straightforward because the distinctively different interfaces make it easy to remember where to place data. But when a one-level store is in use, giving the appearance of random access to all storage, or the non-volatile medium is flash memory, which allows fast random access, it may be necessary for the designer to explicitly specify both the firewall mechanism and which data items are to reside on each side of the firewall.
A good example of the firewall strategy can be found in most implementations of Internet Domain Name System servers. In a typical implementation the server stores the authoritative name records for its domain on magnetic disk, and copies those records into volatile CMOS memory either at system startup or the first time it needs a particular record. If the server fails for any reason, it simply abandons the volatile memory and restarts. In some implementations, the firewall is reinforced by not having any PUT operations in the running name server. Instead, the service updates the authoritative name records using a separate program that runs when the name server is off-line.
In addition to employing independent software implementations and a firewall between categories of data, DNS also protects against environmental faults by employing geographical separation of its replicas, a topic that is explored more deeply in Section 4.3. The three techniques, taken together, make DNS quite fault-tolerant.
Durability and Durable Storage
For the discipline just described to work, we need to make the result of a PUT operation durable. But first we must understand just what "durable" means. Durability is a specification of how long the result of an action must be preserved after the action completes. One must be realistic in specifying durability because there is no such thing as perfectly durable storage in which the data will be remembered forever. However, by choosing enough genuinely independent replicas, and with enough care in management, one can meet any reasonable requirement.
Durability specifications can be roughly divided into four categories, according to the length of time that the application requires that data survive. Although there are no bright dividing lines, as one moves from one category to the next the techniques used to achieve durability tend to change.
- Durability no longer than the lifetime of the thread that created the data. For this case, it is usually adequate to place the data in volatile memory.
For example, an action such as moving the gearshift may require changing the operating parameters of an automobile engine. The result must be reliably remembered, but only until the next shift of gears or the driver switches the engine off.
The operations performed by calls to the kernel of an operating system provide another example. The CHDIR procedure of the UNIX kernel changes the working directory of the currently running process. The kernel state variable that holds the name of the current working directory is a value in volatile RAM that does not need to survive longer than this process.
For a third example, the registers and cache of a hardware processor usually provide just the first category of durability. If there is a failure, the plan is to abandon those values along with the contents of volatile memory, so there is no need for a higher level of durability.
- Durability for times which are short compared to the expected operational lifetime of nonvolatile storage media such as magnetic disk or flash memory. A designer typically implements this category of durability by writing one copy of the data in the nonvolatile storage medium.
Returning to the automotive example, there may be operating parameters such as engine timing that, once calibrated, should be durable at least until the next tune-up, not just for the life of one engine use session. Data stored in a cache that writes through to a non-volatile medium has about this level of durability. As a third example, a remote procedure call protocol that identifies duplicate messages by recording nonces might write old nonce values (see Section 1.6.3) to a non-volatile storage medium, knowing that the real goal is not to remember the nonces forever, but rather to make sure that the nonce record outlasts the longest retry timer of any client. Finally, text editors and word-processing systems typically write temporary copies on magnetic disk of the material currently being edited so that if there is a system crash or power failure the user does not have to repeat the entire editing session. These temporary copies need to survive only until the end of the current editing session.
- Durability for times comparable to the expected operational lifetime of non-volatile storage media. Because actual non-volatile media lifetimes vary quite a bit around the expected lifetime, implementation generally involves placing replicas of the data on independent instances of the non-volatile media.
This category of durability is the one that is usually called durable storage and it is the category for which the next section of this chapter develops techniques for implementation. Users typically expect files stored in their file systems and data managed by a database management system to have this level of durability. Section 4.4 revisits the problem of creating durable storage when replicas are geographically separated.
- Durability for many multiples of the expected operational lifetime of non-volatile storage media.
This highest level of durability is known as preservation, and is the specialty of archivists. In addition to making replicas and keeping careful records, it involves copying data from one non-volatile medium to another before the first one deteriorates or becomes obsolete. Preservation also involves (sometimes heroic) measures to preserve the ability to correctly interpret idiosyncratic formats created by software that has long since become obsolete. Although important, it is a separate topic, so preservation is not discussed any further here.
Magnetic Disk Fault Tolerance
In principle, durable storage can be constructed starting with almost any storage medium, but it is most straightforward to use non-volatile devices. Magnetic disks are widely used as the basis for durable storage because of their low cost, large capacity and non-volatility—they retain their memory when power is turned off or is accidentally disconnected. Even if power is lost during a write operation, at most a small block of data surrounding the physical location that was being written is lost, and disks can be designed with enough internal power storage and data buffering to avoid even that loss. In its raw form, a magnetic disk is remarkably reliable, but it can still fail in various ways and much of the complexity in the design of disk systems consists of masking these failures.
Conventionally, magnetic disk systems are designed in three nested layers. The innermost layer is the spinning disk itself, which provides what we will call raw storage. The next layer is a combination of hardware and firmware of the disk controller that provides for detecting the failures in the raw storage layer; it creates fail-fast storage. Finally, the hard disk firmware adds a third layer that takes advantage of the detection features of the second layer to create a substantially more reliable storage system, known as careful storage. Most disk systems stop there, but high-availability systems add a fourth layer to create durable storage. This section develops a disk failure model and explores error masking techniques for all four layers.
In early disk designs, the disk controller presented more or less the raw disk interface, and the fail-fast and careful layers were implemented in a software component of the operating system called the disk driver. Over the decades, first the fail-fast layer and more recently part or all of the careful layer of disk storage have migrated into the firmware of the disk controller to create what is known in the trade as a "hard drive." A hard drive usually includes a RAM buffer to hold a copy of the data going to and from the disk, both to avoid the need to match the data rate to and from the disk head with the data rate to and from the system memory, and also to simplify retries when errors occur. RAID systems, which provide a form of durable storage, generally are implemented as an additional hardware layer that incorporates mass-market hard drives. One reason for this move of error masking from the operating system into the disk controller is that as computational power has gotten cheaper, the incremental cost of a more elaborate firmware design has dropped. A second reason may explain the obvious contrast with the lack of enthusiasm for memory parity checking hardware that is mentioned in Section 2.9.1. A transient memory error is all but indistinguishable from a program error, so the hardware vendor is not likely to be blamed for it. On the other hand, most disk errors have an obvious source, and hard errors are not transient. Because blame is easy to place, disk vendors have a strong motivation to include error masking in their designs.
Magnetic Disk Fault Modes
There are several considerations when it comes to disk reliability:
- Disks are high precision devices made to close tolerances. Defects in manufacturing a recording surface typically show up in the field as a sector that does not reliably record data. Such defects are a source of hard errors. Deterioration of the surface of a platter with age can cause a previously good sector to fail. Such loss is known as decay and, since any data previously recorded there is lost forever, decay is another example of hard error.
- Since a disk is mechanical, it is subject to wear and tear. Although a modern disk is a sealed unit, deterioration of its component materials as they age can create dust. The dust particles can settle on a magnetic surface, where they may interfere either with reading or writing. If interference is detected, then rereading or rewriting that area of the surface, perhaps after jiggling the seek arm back and forth, may succeed in getting past the interference, so the fault may be transient. Another source of transient faults is electrical noise spikes. Because disk errors caused by transient faults can be masked by retry, they fall in the category of soft errors.
- If a running disk is bumped, the shock may cause a head to hit the surface of a spinning platter, causing what is known as a head crash. A head crash not only may damage the head and destroy the data at the location of impact, it also creates a cloud of dust that interferes with the operation of heads on other platters. A head crash generally results in several sectors decaying simultaneously. A set of sectors that tend to all fail together is known as a decay set. A decay set may be quite large, for example all the sectors on one drive or on one disk platter.
- As electronic components in the disk controller age, clock timing and signal detection circuits can go out of tolerance, causing previously good data to become unreadable, or bad data to be written, either intermittently or permanently. In consequence, electronic component tolerance problems can appear either as soft or hard errors.
- The mechanical positioning systems that move the seek arm and that keep track of the rotational position of the disk platter can fail in such a way that the heads read or write the wrong track or sector within a track. This kind of fault is known as a seek error.
System Faults
In addition to failures within the disk subsystem, there are at least two threats to the integrity of the data on a disk that arise from outside the disk subsystem:
- If the power fails in the middle of a disk write, the sector being written may end up being only partly updated. After the power is restored and the system restarts, the next reader of that sector may find that the sector begins with the new data, but ends with the previous data.
- If the operating system fails during the time that the disk is writing, the data being written could be affected, even if the disk is perfect and the rest of the system is fail-fast. The reason is that all the contents of volatile memory, including the disk buffer, are inside the fail-fast error containment boundary and thus at risk of damage when the system fails. As a result, the disk channel may correctly write on the disk what it reads out of the disk buffer in memory, but the faltering operating system may have accidentally corrupted the contents of that buffer after the application called
PUT. In such cases, the data that ends up on the disk will be corrupted, but there is no sure way in which the disk subsystem can detect the problem.
Raw Disk Storage
Our goal is to devise systematic procedures to mask as many of these different faults as possible. We start with a model of disk operation from a programmer’s point of view. The raw disk has, at least conceptually, a relatively simple interface: There is an operation to seek to a (numbered) track, an operation that writes data on the track and an operation that reads data from the track. The failure model is simple: all errors arising from the failures just described are untolerated. (In the procedure descriptions, arguments are call-by-reference, and GET operations read from the disk into the argument named data.) The raw disk layer implements these storage access procedures and failure tolerance model:
RAW_SEEK (track) // Move read/write head into position.
RAW_PUT (data) // Write entire track.
RAW_GET (data) // Read entire track.
- error-free operation:
RAW_SEEKmoves the seek arm to position track.RAW_GETreturns whatever was most recently written byRAW_PUTat position track. - untolerated error: On any given attempt to read from or write to a disk, dust particles on the surface of the disk or a temporarily high noise level may cause data to be read or written incorrectly. (soft error)
- untolerated error: A spot on the disk may be defective, so all attempts to write to any track that crosses that spot will be written incorrectly. (hard error)
- untolerated error: Information previously written correctly may decay, so
RAW_GETreturns incorrect data. (hard error) - untolerated error: When asked to read data from or write data to a specified track, a disk may correctly read or write the data, but on the wrong track. (seek error)
- untolerated error: The power fails during a
RAW_PUTwith the result that only the first part ofdataends up being written ontrack. The remainder oftrackmay contain older data. - untolerated error: The operating system crashes during a
RAW_PUTand scribbles over the disk buffer in volatile storage, soRAW_PUTwrites corrupted data on one track of the disk.
Fail-Fast Disk Storage
The fail-fast layer is the place where the electronics and microcode of the disk controller divide the raw disk track into sectors. Each sector is relatively small, individually protected with an error-detection code, and includes, in addition to a fixed-sized space for data, a sector and track number. The error-detection code enables the disk controller to return a status code on FAIL_FAST_GET that tells whether a sector read correctly or incorrectly, and the sector and track numbers enable the disk controller to verify that the seek ended up on the correct track. The FAIL_FAST_PUT procedure not only writes the data, but it verifies that the write was successful by reading the newly written sector on the next rotation and comparing it with the data still in the write buffer. The sector thus becomes the minimum unit of reading and writing, and the disk address becomes the pair {track, sector_number}. For performance enhancement, some systems allow the caller to bypass the verification step of FAIL_FAST_PUT. When the client chooses this bypass, write failures become indistinguishable from decay events.
There is always a possibility that the data on a sector is corrupted in such a way that the error-detection code accidentally verifies. For completeness, we will identify that case as an untolerated error, but point out that the error-detection code should be powerful enough that the probability of this outcome is negligible.
The fail-fast layer implements these storage access procedures and failure tolerance model:
status ← FAIL_FAST_SEEK (track)
status ← FAIL_FAST_PUT (data, sector_number)
status ← FAIL_FAST_GET (data, sector_number)
- error-free operation:
FAIL_FAST_SEEKmoves the seek arm to track.FAIL_FAST_GETreturns whatever was most recently written byFAIL_FAST_PUTatsector_numberontrackand returnsstatus = OK. - detected error:
FAIL_FAST_GETreads the data, checks the error-detection code and finds that it does not verify. The cause may a soft error, a hard error due to decay, or a hard error because there is a bad spot on the disk and the invoker of a previousFAIL_FAST_PUTchose to bypass verification.FAIL_FAST_GETdoes not attempt to distinguish these cases; it simply reports the error by returningstatus = BAD. - detected error:
FAIL_FAST_PUTwrites the data, on the next rotation reads the data back, checks the error-detection code, finds that it does not verify, and reports the error by returningstatus = BAD. - detected error:
FAIL_FAST_SEEKmoves the seek arm, reads the permanent track number in the first sector that comes by, discovers that it does not match the requested track number (or that the sector checksum does not verify), and reports the error by returningstatus = BAD. - detected error: The caller of
FAIL_FAST_PUTtells it to bypass the verification step, soFAIL_FAST_PUTalways reportsstatus = OKeven if the sector was not written correctly. But a later caller ofFAIL_FAST_GETthat requests that sector should detect any such error. - detected error: The power fails during a
FAIL_FAST_PUTwith the result that only the first part ofdataends up - being written on
sector. The remainder ofsectormay contain older data. Any later call ofFAIL_FAST_GETfor that sector should discover that the sector checksum fails to verify and will thus returnstatus = BAD. Many (but not all) disks are designed to mask this class of failure by maintaining a reserve of power that is sufficient to complete any current sector write, in which case loss of power would be a tolerated failure. - untolerated error: The operating system crashes during a
FAIL_FAST_PUTand scribbles over the disk buffer in volatile storage, soFAIL_FAST_PUTwrites corrupted data on one sector of the disk. - untolerated error: The data of some sector decays in a way that is undetectable—the checksum accidentally verifies. (Probability should be negligible.)
Careful Disk Storage
The fail-fast disk layer detects but does not mask errors. It leaves masking to the careful disk layer, which is also usually implemented in the firmware of the disk controller. The careful layer checks the value of status following each disk SEEK, GET and PUT operation, retrying the operation several times if necessary, a procedure that usually recovers from seek errors and soft errors caused by dust particles or a temporarily elevated noise level. Some disk controllers seek to a different track and back in an effort to dislodge the dust. The careful storage layer implements these storage procedures and failure tolerance model:
status ← CAREFUL_SEEK (track)
status ← CAREFUL_PUT (data, sector_number)
status ← CAREFUL_GET (data, sector_number)
- error-free operation:
CAREFUL_SEEKmoves the seek arm to track.CAREFUL_GETreturns whatever was most recently written byCAREFUL_PUTatsector_numberontrack. All three returnstatus = OK. - tolerated error: Soft read, write, or seek error.
CAREFUL_SEEK,CAREFUL_GETandCAREFUL_PUTmask these errors by repeatedly retrying the operation until the fail-fast layer stops detecting an error, returning withstatus = OK. The careful storage layer counts the retries, and if the retry count exceeds some limit, it gives up and declares the problem to be a hard error. - detected error: Hard error. The careful storage layer distinguishes hard from soft errors by their persistence through several attempts to read, write, or seek, and reports them to the caller by setting
status = BAD. (But also see the note on revectoring below.) - detected error: The power fails during a
CAREFUL_PUTwith the result that only the first part ofdataends up being written onsector. The remainder ofsectormay contain older data. Any later call ofCAREFUL_GETfor that sector should discover that the sector checksum fails to verify and will thus returnstatus = BAD. (Assuming that the fail-fast layer does not tolerate power failures.) - untolerated error: Crash corrupts data. The system crashes during
CAREFUL_PUTand corrupts the disk buffer in volatile memory, soCAREFUL_PUTcorrectly writes to the disk sector the corrupted data in that buffer. The sector checksum of the fail-fast layer cannot detect this case. - untolerated error: The data of some sector decays in a way that is undetectable—the checksum accidentally verifies. (Probability should be negligible)
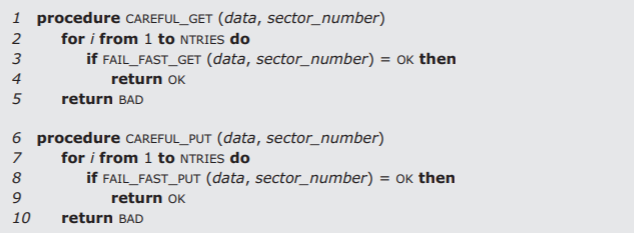
Figure \(\PageIndex{1}\) exhibits algorithms for CAREFUL_GET and CAREFUL_PUT. The procedure CAREFUL_GET, by repeatedly reading any data with status = BAD, masks soft read errors. Similarly, CAREFUL_PUT retries repeatedly if the verification done by FAIL_FAST_PUT fails, thereby masking soft write errors, whatever their source.
.png?revision=1)
Figure \(\PageIndex{1}\): Procedures that implement careful disk storage.
The careful layer of most disk controller designs includes one more feature: if CAREFUL_PUT detects a hard error while writing a sector, it may instead write the data on a spare sector elsewhere on the same disk and add an entry to an internal disk mapping table so that future instances of GET and PUT specifying that sector instead use the spare. This mechanism is called revectoring, and most disk designs allocate a batch of spare sectors for this purpose. The spares are not usually counted in the advertised disk capacity, but the manufacturer’s advertising department does not usually ignore the resulting increase in the expected operational lifetime of the disk. For clarity of the discussion we omit that feature.
As indicated in the failure tolerance analysis, there are still two modes of failure that remain unmasked: a crash during CAREFUL_PUT may undetectably corrupt one disk sector, and a hard error arising from a bad spot on the disk or a decay event may detectably corrupt any number of disk sectors.
Durable Storage: RAID 1
For durability, the additional requirement is to mask decay events, which the careful storage layer only detects. The primary technique is that the PUT procedure should write several replicas of the data, taking care to place the replicas on different physical devices with the hope that the probability of disk decay in one replica is independent of the probability of disk decay in the next one, and the number of replicas is large enough that when a disk fails there is enough time to replace it before all the other replicas fail. Disk system designers call these replicas mirrors. A carefully designed replica strategy can create storage that guards against premature disk failure and that is durable enough to substantially exceed the expected operational lifetime of any single physical disk. Errors on reading are detected by the fail-fast layer, so it is not usually necessary to read more than one copy unless that copy turns out to be bad. Since disk operations may involve more than one replica, the track and sector numbers are sometimes encoded into a virtual sector number and the durable storage layer automatically performs any needed seeks. The durable storage layer implements these storage access procedures and failure tolerance model:
status ← DURABLE_PUT (data, virtual_sector_number)
status ← DURABLE_GET (data, virtual_sector_number)
- error-free operation:
DURABLE_GETreturns whatever was most recently written byDURABLE_PUTatvirtual_sector_numberwithstatus = OK. - tolerated error: Hard errors reported by the careful storage layer are masked by reading from one of the other replicas. The result is that the operation completes with
status = OK. - untolerated error: A decay event occurs on the same sector of all the replicas, and the operation completes with
status = BAD. - untolerated error: The operating system crashes during a
DURABLE_PUTand scribbles over the disk buffer in volatile storage, soDURABLE_PUTwrites corrupted data on all mirror copies of that sector. - untolerated error: The data of some sector decays in a way that is undetectable—the checksum accidentally verifies. (Probability should be negligible)
In this accounting there is no mention of soft errors or positioning errors because they were all masked by a lower layer.
One configuration of RAID, known as "RAID 1," implements exactly this form of durable storage. RAID 1 consists of a tightly-managed array of identical replica disks in which DURABLE_PUT (data, sector_number) writes data at the same sector_number of each disk and DURABLE_GET reads from whichever replica copy has the smallest expected latency, which includes queuing time, seek time, and rotation time. With RAID, the decay set is usually taken to be an entire hard disk. If one of the disks fails, the next DURABLE_GET that tries to read from that disk will detect the failure, mask it by reading from another replica, and put out a call for repair. Repair consists of first replacing the disk that failed and then copying all of the disk sectors from one of the other replica disks.
Improving on RAID 1
Even with RAID 1, an untolerated error can occur if a rarely-used sector decays, and before that decay is noticed all other copies of that same sector also decay. When there is finally a call for that sector, all fail to read and the data is lost. A closely related scenario is that a sector decays and is eventually noticed, but the other copies of that same sector decay before repair of the first one is completed. One way to reduce the chances of these outcomes is to implement a clerk that periodically reads all replicas of every sector, to check for decay. If CAREFUL_GET reports that a replica of a sector is unreadable at one of these periodic checks, the clerk immediately rewrites that replica from a good one. If the rewrite fails, the clerk calls for immediate revectoring of that sector or, if the number of revectorings is rapidly growing, replacement of the decay set to which the sector belongs. The period between these checks should be short enough that the probability that all replicas have decayed since the previous check is negligible. By analyzing the statistics of experience for similar disk systems, the designer chooses such a period, \(T_d\). This approach leads to the following failure tolerance model:
status ← MORE_DURABLE_PUT (data, virtual_sector_number)
status ← MORE_DURABLE_GET (data, virtual_sector_number)
- error-free operation:
MORE_DURABLE_GETreturns whatever was most recently written byMORE_DURABLE_PUTatvirtual_sector_numberwithstatus = OK. - tolerated error: Hard errors reported by the careful storage layer are masked by reading from one of the other replicas. The result is that the operation completes with
status = OK. - tolerated error: data of a single decay set decays, is discovered by the clerk, and is repaired, all within \(T_d\) seconds of the decay event.
- untolerated error: The operating system crashes during a
DURABLE_PUTand scribbles over the disk buffer in volatile storage, soDURABLE_PUTwrites corrupted data on all mirror copies of that sector. - untolerated error: all decay sets fail within \(T_d\) seconds. (With a conservative choice of \(T_d\), the probability of this event should be negligible.)
- untolerated error: The data of some sector decays in a way that is undetectable—the checksum accidentally verifies. (With a good quality checksum, the probability of this event should be negligible.)
A somewhat less effective alternative to running a clerk that periodically verifies integrity of the data is to notice that the bathtub curve of Figure \(2.3.1\) applies to magnetic disks, and simply adopt a policy of systematically replacing the individual disks of the RAID array well before they reach the point where their conditional failure rate is predicted to start climbing. This alternative is not as effective for two reasons: First, it does not catch and repair random decay events, which instead accumulate. Second, it provides no warning if the actual operational lifetime is shorter than predicted (for example, if one happens to have acquired a bad batch of disks).
Detecting Errors Caused by System Crashes
With the addition of a clerk to watch for decay, there is now just one remaining untolerated error that has a significant probability: the hard error created by an operating system crash during CAREFUL_PUT. Since that scenario corrupts the data before the disk subsystem sees it, the disk subsystem has no way of either detecting or masking this error. Help is needed from outside the disk subsystem—either the operating system or the application. The usual approach is that either the system or, even better, the application program, calculates and includes an end-to-end checksum with the data before initiating the disk write. Any program that later reads the data verifies that the stored checksum matches the recalculated checksum of the data. The end-to-end checksum thus monitors the integrity of the data as it passes through the operating system buffers and also while it resides in the disk subsystem.
Sidebar \(\PageIndex{1}\)
- Are disk system checksums a wasted effort?
-
From the previous paragraph, an end-to-end argument suggests that an end-to-end checksum is always needed to protect data on its way to and from the disk subsystem, and that the fail-fast checksum performed inside the disk system thus may not be essential.
However, the disk system checksum cleanly subcontracts one rather specialized job: correcting burst errors of the storage medium. In addition, the disk system checksum provides a handle for disk-layer erasure code implementations such as RAID, as was described in Section 2.5.1. Thus the disk system checksum, though superficially redundant, actually turns out to be quite useful.
The end-to-end checksum allows only detecting this class of error. Masking is another matter—it involves a technique called recovery, which is one of the topics of the next chapter.
Table \(\PageIndex{1}\) summarizes where failure tolerance is implemented in the several disk layers. The hope is that the remaining untolerated failures are so rare that they can be neglected. If they are not, the number of replicas could be increased until the probability of untolerated failures is negligible.
| raw layer | fail-fast layer | careful layer | durable layer | more durable layer | |
|---|---|---|---|---|---|
| soft read, write, or seek error | failure | detected | masked | ||
| hard read, write error | failure | detected | detected | masked | |
| power failure interrupts a write | failure | detected | detected | masked | |
| single data decay | failure | detected | detected | masked | |
| multiple data decay spaced in time | failure | detected | detected | detected | masked |
| multiple data decay within \(T_d\) | failure | detected | detected | detected | failure\(^*\) |
| undetectable decay | failure | failure | failure | failure | failure\(^*\) |
| system crash corrupts write buffer | failure | failure | failure | failure | detected |
Still More Threats to Durability
The various procedures described above create storage that is durable in the face of individual disk decay but not in the face of other threats to data integrity. For example, if the power fails in the middle of a MORE_DURABLE_PUT, some replicas may contain old versions of the data, some may contain new versions, and some may contain corrupted data, so it is not at all obvious how MORE_DURABLE_GET should go about meeting its specification. The solution is to make MORE_DURABLE_PUT atomic, which is one of the topics of Chapter 3.
RAID systems usually specify that a successful return from a PUT confirms that writing of all of the mirror replicas was successful. That specification in turn usually requires that the multiple disks be physically co-located, which in turn creates a threat that a single physical disaster—fire, earthquake, flood, civil disturbance, etc.—might damage or destroy all of the replicas.
Since magnetic disks are quite reliable in the short term, a different strategy is to write only one replica at the time that MORE_DURABLE_PUT is invoked and write the remaining replicas at a later time. Assuming there are no inopportune failures in the short run, the results gradually become more durable as more replicas are written. Replica writes that are separated in time are less likely to have replicated failures because they can be separated in physical location, use different disk driver software, or be written to completely different media such as magnetic tape. On the other hand, separating replica writes in time increases the risk of inconsistency among the replicas. Implementing storage that has durability that is substantially beyond that of RAID 1 and MORE_DURABLE_PUT/GET generally involves use of geographically separated replicas and systematic mechanisms to keep those replicas coordinated, a challenge that Chapter 4 discusses in depth.
Perhaps the most serious threat to durability is that although different storage systems have employed each of the failure detection and masking techniques discussed in this section, it is all too common to discover that a typical off-the-shelf personal computer file system has been designed using an overly simple disk failure model and thus misses some—or even many—straightforward failure masking opportunities.