
3.2: Atomicity
- Page ID
- 58507
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Atomicity is a property required in several different areas of computer system design. These areas include managing a database, developing a hardware architecture, specifying the interface to an operating system, and more generally in software engineering. The table below suggests some of the kinds of problems to which atomicity is applicable. In this chapter we will encounter examples of both kinds of atomicity in each of these different areas.
| Area | All-or-nothing Atomicity | Before-and-after Atomicity |
|---|---|---|
| database management | updating more than one record | records shared between threads |
| hardware architecture | handling interrupts and exceptions | register renaming |
| operating systems | supervisor call interface | printer queue |
| software engineering | handling faults in layers | bounded buffer |
All-or-Nothing Atomicity in a Database
As a first example, consider a database of bank accounts. We define a procedure named TRANSFER that debits one account and credits a second account, both of which are stored on disk, as follows:
1 procedure TRANSFER (debit_account, credit_account, amount)
2 GET (dbdata, debit_account)
3 dbdata ← dbdata - amount
4 PUT (dbdata, debit_account)
5 GET (crdata, credit_account)
6 crdata ← crdata + amount
7 PUT (crdata, credit_account)
where debit_account and credit_account identify the records for the accounts to be debited and credited, respectively.
Suppose that the system crashes while executing the PUT instruction on line 4. Even if we use the MORE_DURABLE_PUT described in Section 2.6.4, a system crash at just the wrong time may cause the data written to the disk to be scrambled, and the value of debit_account lost. We would prefer that either the data be completely written to the disk or nothing be written at all. That is, we want the PUT instruction to have the all-or-nothing atomicity property. Section 3.3.1 will describe a way to do that.
There is a further all-or-nothing atomicity requirement in the TRANSFER procedure. Suppose that the PUT on line 4 is successful but that while executing line 5 or line 6 the power fails, stopping the computer in its tracks. When power is restored, the computer restarts, but volatile memory, including the state of the thread that was running the TRANSFER procedure, has been lost. If someone now inquires about the balances in debit_account and in credit_account things will not add up properly, because debit_account has a new value but credit_account has an old value. One might suggest postponing the first PUT to be just before the second one, but that just reduces the window of vulnerability, it does not eliminate it—the power could still fail in between the two PUTs. To eliminate the window, we must somehow arrange that the two PUT instructions, or perhaps even the entire TRANSFER procedure, be done as an all-or-nothing atomic action. In Section 3.3.3 we will devise a TRANSFER procedure that has the all-or-nothing property, and in Section 3.4 we will see some additional ways of providing the property.
All-or-Nothing Atomicity in the Interrupt Interface
A second application for all-or-nothing atomicity is in the processor instruction set interface as seen by a thread. A thread normally performs actions one after another, as directed by the instructions of the current program, but that certain events may catch the attention of the thread’s interpreter, causing the interpreter, rather than the program, to supply the next instruction. When such an event happens, a different program, running in an interrupt thread, takes control.
If the event is a signal arriving from outside the interpreter, the interrupt thread may simply invoke a thread management primitive such as ADVANCE to alert some other thread about the event. For example, an I/O operation that the other thread was waiting for may now have completed. The interrupt handler then returns control to the interrupted thread. This example requires before-or-after atomicity between the interrupt thread and the interrupted thread. If the interrupted thread was in the midst of a call to the thread manager, the invocation of ADVANCE by the interrupt thread should occur either before or after that call.
Another possibility is that the interpreter has detected that something is going wrong in the interrupted thread. In that case, the interrupt event invokes an exception handler, which runs in the environment of the original thread. (Sidebar \(\PageIndex{1}\) offers some examples.) The exception handler either adjusts the environment to eliminate some problem (such as a missing page) so that the original thread can continue, or it declares that the original thread has failed and terminates it. In either case, the exception handler will need to examine the state of the action that the original thread was performing at the instant of the interruption—was that action finished, or is it in a partially done state?
Sidebar \(\PageIndex{1}\)
- Events that might lead to invoking an exception handler
-
- A hardware fault occurs:
- The processor detects a memory parity fault.
- A sensor reports that the electric power has failed; the energy left in the power supply may be just enough to perform a graceful shutdown.
- A hardware or software interpreter encounters something in the program that is clearly wrong:
- The program tried to divide by zero.
- The program supplied a negative argument to a square root function.
- Continuing requires some resource allocation or deferred initialization:
- The running thread encountered a missing-page exception in a virtual memory system.
- The running thread encountered an indirection exception, indicating that it encountered an unresolved procedure linkage in the current program.
- More urgent work needs to take priority, so the user wishes to terminate the thread:
- This program is running much longer than expected.
- The program is running normally, but the user suddenly realizes that it is time to catch the last train home.
- The user realizes that something is wrong and decides to terminate the thread:
- Calculating \(e\), the program starts to display \(3.1415…\)
- The user asked the program to copy the wrong set of files.
- Deadlock:
- Thread A has acquired the scanner, and is waiting for memory to become free; thread B has acquired all available memory, and is waiting for the scanner to be released. Either the system notices that this set of waits cannot be resolved or, more likely, a timer that should never expire eventually expires. The system or the timer signals an exception to one or both of the deadlocked threads.
- A hardware fault occurs:
Ideally, the handler would like to see an all-or-nothing report of the state: either the instruction that caused the exception completed or it didn’t do anything. An all-or-nothing report means that the state of the original thread is described entirely with values belonging to the layer in which the exception handler runs. An example of such a value is the program counter, which identifies the next instruction that the thread is to execute. An in-the-middle report would mean that the state description involves values of a lower layer, probably the operating system or the hardware processor itself. In that case, knowing the next instruction is only part of the story; the handler would also need to know which parts of the current instruction were executed and which were not. An example might be an instruction that increments an address register, retrieves the data at that new address, and adds that data value to the value in another register. If retrieving the data causes a missing-page exception, the description of the current state is that the address register has been incremented but the retrieval and addition have not yet been performed. Such an in-the-middle report is problematic because after the handler retrieves the missing page it cannot simply tell the processor to jump to the instruction that failed—that would increment the address register again, which is not what the programmer expected. Jumping to the next instruction isn’t right, either, because that would omit the addition step. An all-or-nothing report is preferable because it avoids the need for the handler to peer into the details of the next lower layer. Modern processor designers are generally careful to avoid designing instructions that don’t have the all-or-nothing property. As will be seen shortly, designers of higher-layer interpreters must be similarly careful.
Sections 3.2.3 and 3.2.4 explore the case in which the exception terminates the running thread, thus creating a fault. Section 3.2.5 examines the case in which the interrupted thread continues, oblivious (one hopes) to the interruption.
All-or-Nothing Atomicity in a Layered Application
A third example of all-or-nothing atomicity lies in the challenge presented by a fault in a running program: at the instant of the fault, the program is typically in the middle of doing something, and it is usually not acceptable to leave things half-done. Our goal is to obtain a more graceful response, and the method will be to require that some sequence of actions behave as an atomic action with the all-or-nothing property. Atomic actions are closely related to the modularity that arises when things are organized in layers. Layered components have the feature that a higher layer can completely hide the existence of a lower layer. This hiding feature makes layers exceptionally effective at error containment and for systematically responding to faults.
To see why, view the layered structure of the calendar management program found in Figure \(\PageIndex{1}\). The calendar program implements each request of the user by executing a sequence of Java language statements. Ideally, the user will never notice any evidence of the composite nature of the actions implemented by the calendar manager. Similarly, each statement of the Java language is implemented by several actions at the hardware layer. Again, if the Java interpreter is carefully implemented, the composite nature of the implementation in terms of machine language will be completely hidden from the Java programmer.
![A human user generates requests for a calendar program, issuing an instruction such as "add new event on February 24" across the calendar management interface. The calendar program issues an instruction such as "nextch = instring[j];" across the Java language layer interface to the Java interpreter. The Java interpreter issues an instruction such as "add R1, R2" across the machine language layer interface to the computer's hardware.](https://eng.libretexts.org/@api/deki/files/48628/Screenshot_(288).png?revision=1)
Figure \(\PageIndex{1}\): An application system with three layers of interpretation. If the user has requested an action that will fail, but the failure will be discovered at the lowest layer. A graceful response involves atomicity at each interface.
Now consider what happens if the hardware processor detects a condition that should be handled as an exception—for example, a register overflow. The machine is in the middle of interpreting an action at the machine language layer interface—an ADD instruction somewhere in the middle of the Java interpreter program. That ADD instruction is itself in the middle of interpreting an action at the Java language interface—a Java expression to scan an array. That Java expression in turn is in the middle of interpreting an action at the user interface—a request from the user to add a new event to the calendar. The report "Overflow exception caused by the ADD instruction at location 41574" is not intelligible to the user at the user interface; that description is meaningful only at the machine language interface. Unfortunately, the implication of being "in the middle" of higher-layer actions is that the only accurate description of the current state of affairs is in terms of the progress of the machine language program.
The actual state of affairs in our example as understood by an all-seeing observer might be the following: the register overflow was caused by adding one to a register that contained a two’s complement negative one at the machine language layer. That machine language add instruction was part of an action to scan an array of characters at the Java layer and a zero means that the scan has reached the end of the array. The array scan was embarked upon by the Java layer in response to the user's request to add an event on February 31. The highest-level interpretation of the overflow exception is "You tried to add an event on a non-existent date." We want to make sure that this report goes to the end user, rather than the one about register overflow. In addition, we want to be able to assure the user that this mistake has not caused an empty event to be added somewhere else in the calendar or otherwise led to any other changes to the calendar. Since the system couldn’t do the requested change, it should do nothing but report the error. Either a low-level error report or muddled data would reveal to the user that the action was composite.
With the insight that in a layered application, we want a fault detected by a lower layer to be contained in a particular way we can now propose a more formal definition of all-or-nothing atomicity:
Definition: All-or-nothing Atomicity
A sequence of steps is an all-or-nothing action if, from the point of view of its invoker, the sequence always either
- completes,
or
- aborts in such a way that it appears that the sequence had never been undertaken in the first place. That is, it backs out.
In a layered application, the idea is to design each of the actions of each layer to be all-or-nothing. That is, whenever an action of a layer is carried out by a sequence of actions of the next lower layer, the action either completes what it was asked to do or else it backs out, acting as though it had not been invoked at all. When control returns to a higher layer after a lower layer detects a fault, the problem of being "in the middle" of an action thus disappears.
In our calendar management example, we might expect that the machine language layer would complete the add instruction but signal an overflow exception; the Java interpreter layer would, upon receiving the overflow exception might then decide that its array scan has ended, and return a report of "scan complete, value not found" to the calendar management layer; the calendar manager would take this not-found report as an indication that it should back up, completely undo any tentative changes, and tell the user that the request to add an event on that date could not be accomplished because the date does not exist.
Thus some layers run to completion, while others back out and act as though they had never been invoked, but either way the actions are all-or-nothing. In this example, the failure would probably propagate all the way back to the human user to decide what to do next. A different failure (e.g. "there is no room in the calendar for another event") might be intercepted by some intermediate layer that knows of a way to mask it (e.g., by allocating more storage space). In that case, the all-or-nothing requirement is that the layer that masks the failure find that the layer below has either never started what was to be the current action, or else it has completed the current action but has not yet undertaken the next one.
All-or-nothing atomicity is not usually achieved casually, but rather by careful design and specification. Designers often get it wrong. An unintelligible error message is the typical symptom that a designer got it wrong. To gain some insight into what is involved, let us examine some examples.
Some Actions With and Without the All-or-Nothing Property
Actions that lack the all-or-nothing property have frequently been discovered upon adding multilevel memory management to a computer architecture, especially to a processor that is highly pipelined. In this case, the interface that needs to be all-or-nothing lies between the processor and the operating system. Unless the original machine architect designed the instruction set with missing-page exceptions in mind, there may be cases in which a missing-page exception can occur "in the middle" of an instruction, after the processor has overwritten some register or after later instructions have entered the pipeline. When such a situation arises, the later designer who is trying to add the multilevel memory feature is trapped. The instruction cannot run to the end because one of the operands it needs is not in real memory. While the missing page is being retrieved from secondary storage, the designer would like to allow the operating system to use the processor for something else (perhaps even to run the program that fetches the missing page), but reusing the processor requires saving the state of the currently executing program, so that it can be restarted later when the missing page is available. The problem is how to save the next-instruction pointer.
If every instruction is an all-or-nothing action, the operating system can simply save as the value of the next-instruction pointer the address of the instruction that encountered the missing page. The resulting saved state description shows that the program is between two instructions, one of which has been completely executed, and the next one of which has not yet begun. Later, when the page is available, the operating system can restart the program by reloading all of the registers and setting the program counter to the place indicated by the next-instruction pointer. The processor will continue, starting with the instruction that previously encountered the missing page exception; this time it should succeed. On the other hand, if even one instruction of the instruction set lacks the all-or-nothing property, when an interrupt happens to occur during the execution of that instruction it is not at all obvious how the operating system can save the processor state for a future restart. Designers have come up with several techniques to retrofit the all-or-nothing property at the machine language interface. Section 3.9 describes some examples of machine architectures that had this problem and the techniques that were used to add virtual memory to them.
A second example is the supervisor call (SVC). The SVC instruction changes both the program counter and the processor mode bit (and in systems with virtual memory, other registers such as the page map address register), so it needs to be all-or-nothing to ensure that all (or none) of the intended registers change. Beyond that, the SVC invokes some complete kernel procedure. The designer would like to arrange that the entire call (the combination of the SVC instruction and the operation of the kernel procedure itself) be an all-or-nothing action. An all-or-nothing design allows the application programmer to view the kernel procedure as if it is an extension of the hardware. That goal is easier said than done, since the kernel procedure may detect some condition that prevents it from carrying out the intended action. Careful design of the kernel procedure is thus required.
Consider an SVC to a kernel READ procedure that delivers the next typed keystroke to the caller. The user may not have typed anything yet when the application program calls READ, so the the designer of READ must arrange to wait for the user to type something. By itself, this situation is not especially problematic, but it becomes more so when there is also a user-provided exception handler. Suppose, for example, a thread timer can expire during the call to READ and the user-provided exception handler is to decide whether or not the thread should continue to run a while longer. The scenario, then, is the user program calls READ, it is necessary to wait, and while waiting, the timer expires and control passes to the exception handler. Different systems choose one of three possibilities for the design of the READ procedure, the last one of which is not an all-or-nothing design:
- An all-or-nothing design that implements the "nothing" option (blocking read): Seeing no available input, the kernel procedure first adjusts return pointers ("push the PC back") to make it appear that the application program called
AWAITis just ahead of its call to the kernelREADprocedure and then it transfers control to the kernelAWAITentry point. When the user finally types something, causingAWAITto return, the user's thread re-executes the original kernel call toREAD, this time finding the typed input. With this design, if a timer exception occurs while waiting, when the exception handler investigates the current state of the thread it finds the answer "the application program is between instructions; its next instruction is a call toREAD." This description is intelligible to a user-provided exception handler, and it allows that handler several options. One option is to continue the thread, meaning go ahead and execute the call toREAD. If there is still no input,READwill again push the PC back and transfer control toAWAIT. Another option is for the handler to save this state description with a plan of restoring a future thread to this state at some later time. - An all-or-nothing design that implements the "all" option (non-blocking read): Seeing no available input, the kernel immediately returns to the application program with a zero-length result, expecting that the program will look for and properly handle this case. The program would probably test the length of the result and if zero, call
AWAITitself or it might find something else to do instead. As with the previous design, this design ensures that at all times the user-provided timer exception handler will see a simple description of the current state of the thread—it is between two user program instructions. However, some care is needed to avoid a race between the call toAWAITand the arrival of the next typed character. - A blocking read design that is neither "all" nor "nothing" and therefore not atomic: The kernel
READprocedure itself callsAWAIT, blocking the thread until the user types a character. Although this design seems conceptually simple, the description of the state of the thread from the point of view of the timer exception handler is not simple. Rather than being "between two user instructions," it is "waiting for something to happen in the middle of a user call to kernel procedureREAD." The option of saving this state description for future use has been foreclosed. To start another thread with this state description, the exception handler would need to be able to request "start this thread just after the call toAWAITin the middle of the kernelREADentry." But allowing that kind of request would compromise the modularity of the user-kernel interface. The user-provided exception handler could equally well make a request to restart the thread anywhere in the kernel, thus bypassing its gates and compromising its security.
The first and second designs correspond directly to the two options in the definition of an all-or-nothing action, and indeed some operating systems offer both options. In the first design the kernel program acts in a way that appears that the call had never taken place, while in the second design the kernel program runs to completion every time it is called. Both designs make the kernel procedure an all-or-nothing action, and both lead to a user-intelligible state description—the program is between two of its instructions—if an exception should happen while waiting.
Before-or-After Atomicity: Coordinating Concurrent Threads
We can express opportunities for concurrency by creating threads, the goal of concurrency being to improve performance by running several things at the same time. Moreover, Section 3.2.2 above pointed out that interrupts can also create concurrency. Concurrent threads do not represent any special problem until their paths cross. The way that paths cross can always be described in terms of shared, writable data: concurrent threads happen to take an interest in the same piece of writable data at about the same time. It is not even necessary that the concurrent threads be running simultaneously; if one is stalled (perhaps because of an interrupt) in the middle of an action, a different, running thread can take an interest in the data that the stalled thread was, and will sometime again be, working with.
From the point of view of the programmer of an application, there are two quite different kinds of concurrency coordination requirements: sequence coordination and before-or-after atomicity. Sequence coordination is a constraint of the type "Action W must happen before action X." For correctness, the first action must complete before the second action begins. For example, reading of typed characters from a keyboard must happen before running the program that presents those characters on a display. As a general rule, when writing a program one can anticipate the sequence coordination constraints, and the programmer knows the identity of the concurrent actions. Sequence coordination thus is usually explicitly programmed, using either special language constructs or shared variables such as eventcounts.
In contrast, before-or-after atomicity is a more general constraint that several actions that concurrently operate on the same data should not interfere with one another. We define before-or-after atomicity as follows:
Definition: Before-or-after Atomicity
Concurrent actions have the before-or-after property if their effect from the point of view of their invokers is the same as if the actions occurred either completely before or completely after one another.
Before-or-after actions can be created with explicit locks and a thread manager that implements the procedures ACQUIRE and RELEASE. Programming correct before-or-after actions, such as coordinating a bounded buffer with several producers or several consumers, can be a tricky proposition. To be confident of correctness, one needs to establish a compelling argument that every action that touches a shared variable follows the locking protocol.
One thing that makes before-or-after atomicity different from sequence coordination is that the programmer of an action that must have the before-or-after property does not necessarily know the identities of all the other actions that might touch the shared variable. This lack of knowledge can make it problematic to coordinate actions by explicit program steps. Instead, what the programmer needs is an automatic, implicit mechanism that ensures proper handling of every shared variable. This chapter will describe several such mechanisms. Put another way, correct coordination requires discipline in the way concurrent threads read and write shared data.
Applications for before-or-after atomicity in a computer system abound. In an operating system, several concurrent threads may decide to use a shared printer at about the same time. It would not be useful for printed lines of different threads to be interleaved in the printed output. Moreover, it doesn't really matter which thread gets to use the printer first; the primary consideration is that one use of the printer be complete before the next begins, so the requirement is to give each print job the before-or-after atomicity property.
For a more detailed example, let us return to the banking application and the TRANSFER procedure. This time the account balances are held in shared memory variables (recall that the declaration keyword reference means that the argument is call-by-reference, so that TRANSFER can change the values of those arguments):
procedure TRANSFER (reference debit_account, reference credit_account, amount)
debit_account ← debit_account - amount
credit_account ← credit_account + amount
Despite their unitary appearance, a program statement such as "X ← X + Y " is actually composite: it involves reading the values of X and Y, performing an addition, and then writing the result back into X. If a concurrent thread reads and changes the value of X between the read and the write done by this statement, that other thread may be surprised when this statement overwrites its change.
Suppose this procedure is applied to accounts A (initially containing $300) and B (initially containing $100) as in
TRANSFER (A, B, $10)
We expect account A, the debit account, to end up with $290, and account B, the credit account, to end up with $110. Suppose, however, a second, concurrent thread is executing the statement
TRANSFER (B, C, $25)
where account C starts with $175. When both threads complete their transfers, we expect B to end up with $85 and C with $200. Further, this expectation should be fulfilled no matter which of the two transfers happens first. But the variable credit_account in the first thread is bound to the same object (account B) as the variable debit_account in the second thread. The risk to correctness occurs if the two transfers happen at about the same time. To understand this risk, consider Figure \(\PageIndex{2}\), which illustrates several possible time sequences of the READ and WRITE steps of the two threads with respect to variable B.
.png?revision=1)
Figure \(\PageIndex{2}\): Six possible histories of variable B if two threads that share B do not coordinate their concurrent activities.
With each time sequence the figure shows the history of values of the cell containing the balance of account B. If both steps 1–1 and 1–2 precede both steps 2–1 and 2–2, (or vice versa) the two transfers will work as anticipated, and B ends up with $85. If, however, step 2–1 occurs after step 1–1, but before step 1–2, a mistake will occur: one of the two transfers will not affect account B, even though it should have. The first two cases illustrate histories of shared variable B in which the answers are the correct result; the remaining four cases illustrate four different sequences that lead to two incorrect values for B.
Thus our goal is to ensure that one of the first two time sequences actually occurs. One way to achieve this goal is that the two steps 1–1 and 1–2 should be atomic, and the two steps 2–1 and 2–2 should similarly be atomic. In the original program, the steps
debit_account ← debit_account - amount
and
credit_account ← credit_account + amount
should each be atomic. There should be no possibility that a concurrent thread that intends to change the value of the shared variable debit_account read its value between the READ and WRITE steps of this statement.
Correctness and Serialization
The notion that the first two sequences of Figure \(\PageIndex{2}\) are correct and the other four are wrong is based on our understanding of the banking application. It would be better to have a more general concept of correctness that is independent of the application. Application independence is a modularity goal: we want to be able to make an argument for correctness of the mechanism that provides before-or-after atomicity without getting into the question of whether or not the application using the mechanism is correct.
There is such a correctness concept: coordination among concurrent actions can be considered to be correct if every result is guaranteed to be one that could have been obtained by some purely serial application of those same actions.
.png?revision=1)
Figure \(\PageIndex{3}\): A single action takes a system from one state to another state.
The reasoning behind this concept of correctness involves several steps. Consider Figure \(\PageIndex{3}\), which shows, abstractly, the effect of applying some action, whether atomic or not, to a system: the action changes the state of the system. Now, if we are sure that:
- the old state of the system was correct from the point of view of the application, and
- the action, performing all by itself, correctly transforms any correct old state to a correct new state,
then we can reason that the new state must also be correct. This line of reasoning holds for any application-dependent definition of "correct" and "correctly transform", so our reasoning method is independent of those definitions and thus of the application.
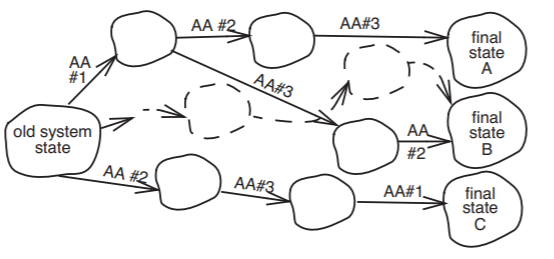
The corresponding requirement when several actions act concurrently, as in Figure \(\PageIndex{4}\), is that the resulting new state ought to be one of those that would have resulted from some serialization of the several actions, as in Figure \(\PageIndex{5}\). This correctness criterion means that concurrent actions are correctly coordinated if their result is guaranteed to be one that would have been obtained by some purely serial application of those same actions. So long as the only coordination requirement is before-or-after atomicity, any serialization will do.
.png?revision=1)
Figure \(\PageIndex{4}\): When several actions act concurrently, they together produce a new state. If the actions are before-or-after and the old state was correct, the new state will be correct.
Moreover, we do not even need to insist that the system actually traverse the intermediate states along any particular path of Figure \(\PageIndex{5}\)—it may instead follow the dotted trajectory through intermediate states that are not by themselves correct, according to the application’s definition. As long as the intermediate states are not visible above the implementing layer, and the system is guaranteed to end up in one of the acceptable final states, we can declare the coordination to be correct because there exists a trajectory that leads to that state for which a correctness argument could have been applied to every step.
.png?revision=1)
Figure \(\PageIndex{5}\): We insist that the final state be one that could have been reached by some serialization of the atomic actions, but we don't care which serialization. In addition, we do not need to insist that the intermediate states ever actually exist. The actual state trajectory could be that shown by the dotted lines, but only if there is no way of observing the intermediate states from the outside.
Since our definition of before-or-after atomicity is that each before-or-after action act as though it ran either completely before or completely after each other before-or-after action, before-or-after atomicity leads directly to this concept of correctness. Put another way, before-or-after atomicity has the effect of serializing the actions, so it follows that before-or-after atomicity guarantees correctness of coordination. A different way of expressing this idea is to say that when concurrent actions have the before-or-after property, they are serializable: there exists some serial order of those concurrent transactions that would, if followed, lead to the same ending state.\(^*\) Thus in Figure \(\PageIndex{2}\), the sequences of case 1 and case 2 could result from a serialized order, but the actions of cases 3 through 6 could not.
In the example of Figure \(\PageIndex{2}\), there were only two concurrent actions and each of the concurrent actions had only two steps. As the number of concurrent actions and the number of steps in each action grows there will be a rapidly growing number of possible orders in which the individual steps can occur, but only some of those orders will ensure a correct result. Since the purpose of concurrency is to gain performance, one would like to have a way of choosing from the set of correct orders the one correct order that has the highest performance. As one might guess, making that choice can in general be quite difficult. In Section 3.5 and Section 3.6 of this chapter we will encounter several programming disciplines that ensure choice from a subset of the possible orders, all members of which are guaranteed to be correct but which, unfortunately, may not include the correct order that has the highest performance.
In some applications it is appropriate to use a correctness requirement that is stronger than serializability. For example, the designer of a banking system may want to avoid anachronisms by requiring what might be called external time consistency: if there is any external evidence (such as a printed receipt) that before-or-after action \(T_1\) ended before before-or-after action \(T_2\) began, the serialization order of \(T_1\) and \(T_2\) inside the system should be that \(T_1\) precedes \(T_2\). For another example of a stronger correctness requirement, a processor architect may require sequential consistency: when the processor concurrently performs multiple instructions from the same instruction stream, the result should be as if the instructions were executed in the original order specified by the programmer.
Returning to our example, a real funds-transfer application typically has several distinct before-or-after atomicity requirements. Consider the following auditing procedure; its purpose is to verify that the sum of the balances of all accounts is zero (in double-entry bookkeeping, accounts belonging to the bank, such as the amount of cash in the vault, have negative balances):
procedure AUDIT()
sum ← 0
for each W in bank.accounts
sum ← sum + W.balance
if (sum ≠ 0) call for investigation
Suppose that AUDIT is running in one thread at the same time that another thread is transferring money from account A to account B. If AUDIT examines account A before the transfer and account B after the transfer, it will count the transferred amount twice and thus will compute an incorrect answer. So the entire auditing procedure should occur either before or after any individual transfer: we want it to be a before-or-after action.
There is yet another before-or-after atomicity requirement: if AUDIT should run after the statement in TRANSFER that consists of
debit_account ← debit_account - amount
but before the statement
credit_account ← credit_account + amount
it will calculate a sum that does not include amount ; we therefore conclude that the two balance updates should occur either completely before or completely after any AUDIT action. Put another way, TRANSFER should be a before-or-after action.
\(^*\) The general question of whether or not a collection of existing transactions isserializable is an advanced topic that is addressed in database management. Problem Set 20 explores one method of answering this question.
All-or-Nothing and Before-or-After Atomicity
We now have seen examples of two forms of atomicity: all-or-nothing and before-or-after. These two forms have a common underlying goal: to hide the internal structure of an action. With that insight, it becomes apparent that atomicity is really a unifying concept:
Definition: Atomicity
An action is atomic if there is no way for a higher layer to discover the internal structure of its implementation.
This description is really the fundamental definition of atomicity. From it, one can immediately draw two important consequences, corresponding to all-or-nothing atomicity and to before-or-after atomicity:
- From the point of view of a procedure that invokes an atomic action, the atomic action always appears either to complete as anticipated, or to do nothing. This consequence is the one that makes atomic actions useful in recovering from failures.
- From the point of view of a concurrent thread, an atomic action acts as though it occurs either completely before or completely after every other concurrent atomic action. This consequence is the one that makes atomic actions useful for coordinating concurrent threads.
These two consequences are not fundamentally different. They are simply two perspectives, the first from other modules within the thread that invokes the action, the second from other threads. Both points of view follow from the single idea that the internal structure of the action is not visible outside of the module that implements the action. Such hiding of internal structure is the essence of modularity, but atomicity is an exceptionally strong form of modularity. Atomicity hides not just the details of which steps form the atomic action, but also the very fact that it has structure. There is a kinship between atomicity and other system-building techniques such as data abstraction and client/server organization. Data abstraction has the goal of hiding the internal structure of data; client/server organization has the goal of hiding the internal structure of major subsystems. Similarly, atomicity has the goal of hiding the internal structure of an action. All three are methods of enforcing industrial-strength modularity, and thereby of guaranteeing absence of unanticipated interactions among components of a complex system.
We have used phrases such as "from the point of view of the invoker" several times, suggesting that there may be another point of view from which internal structure is apparent. That other point of view is seen by the implementer of an atomic action, who is often painfully aware that an action is actually composite, and who must do extra work to hide this reality from the higher layer and from concurrent threads. Thus the interfaces between layers are an essential part of the definition of an atomic action, and they provide an opportunity for the implementation of an action to operate in any way that ends up providing atomicity.
There is one more aspect of hiding the internal structure of atomic actions: atomic actions can have benevolent side effects. A common example is an audit log, where atomic actions that run into trouble record the nature of the detected failure and the recovery sequence for later analysis. One might think that when a failure leads to backing out, the audit log should be rolled back too, but rolling it back would defeat its purpose—the whole point of an audit log is to record details about the failure. The important point is that the audit log is normally a private record of the layer that implemented the atomic action; in the normal course of operation it is not visible above that layer, so there is no requirement to roll it back. (A separate atomicity requirement is to ensure that the log entry that describes a failure is complete and not lost in the ensuing recovery.)
Another example of a benevolent side effect is performance optimization. For example, in a high-performance data management system, when an upper layer atomic action asks the data management system to insert a new record into a file, the data management system may decide as a performance optimization that now is the time to rearrange the file into a better physical order. If the atomic action fails and aborts, it need ensure only that the newly-inserted record be removed; the file does not need to be restored to its older, less efficient, storage arrangement. Similarly, a lower-layer cache that now contains a variable touched by the atomic action does not need to be cleared and a garbage collection of heap storage does not need to be undone. Such side effects are not a problem, as long as they are hidden from the higher-layer client of the atomic action except perhaps in the speed with which later actions are carried out, or across an interface that is intended to report performance measures or failures.