
3.3: All-Or-Nothing Atomicity I - Concepts
- Page ID
- 58508

Section 3.2 of this chapter defined the goals of all-or-nothing atomicity and before-or-after atomicity, and provided a conceptual framework that at least in principle allows a designer to decide whether or not some proposed algorithm correctly coordinates concurrent activities. However, it did not provide any examples of actual implementations of either goal. This section of the chapter, together with the next one, describe some widely applicable techniques of systematically implementing all-or-nothing atomicity. Later sections of the chapter will do the same for before-or-after atomicity.
Many of the examples employ the technique called bootstrapping, a method that resembles inductive proof. Bootstrapping means to first look for a systematic way to reduce a general problem to some much-narrowed particular version of that same problem. Then, solve the narrow problem using some specialized method that might work only for that case because it takes advantage of the specific situation. The general solution then consists of two parts: a special-case technique plus a method that systematically reduces the general problem to the special case. This chapter uses bootstrapping several times. The first example starts with the special case and then introduces a way to reduce the general problem to that special case. The reduction method, called the version history, is used only occasionally in practice, but once understood it becomes easy to see why the more widely used reduction methods that will be described in Section 3.4 work.
Achieving All-or-Nothing Atomicity: ALL_OR_NOTHING_PUT
The first example is of a scheme that does an all-or-nothing update of a single disk sector. The problem to be solved is that if a system crashes in the middle of a disk write (for example, the operating system encounters a bug or the power fails), the sector that was being written at the instant of the failure may contain an unusable muddle of old and new data. The goal is to create an all-or-nothing PUT with the property that when GET later reads the sector, it always returns either the old or the new data, but never a muddled mixture.
To make the implementation precise, we develop a disk fault tolerance model that is a slight variation of the one introduced in Chapter 2, taking as an example application a calendar management program for a personal computer. The user is hoping that, if the system fails while adding a new event to the calendar, when the system later restarts the calendar will be safely intact. Whether or not the new event ended up in the calendar is less important than that the calendar not be damaged by inopportune timing of the system failure. This system comprises a human user, a display, a processor, some volatile memory, a magnetic disk, an operating system, and the calendar manager program. We model this system in several parts:
Overall system fault tolerance model.
- error-free operation: All work goes according to expectations. The user initiates actions such as adding events to the calendar and the system confirms the actions by displaying messages to the user.
- tolerated error: The user who has initiated an action notices that the system failed before it confirmed completion of the action and, when the system is operating again, checks to see whether or not it actually performed that action.
- untolerated error: The system fails without the user noticing, so the user does not realize that he or she should check or retry an action that the system may not have completed.
The tolerated error specification means that, to the extent possible, the entire system is fail-fast: if something goes wrong during an update, the system stops before taking any more requests, and the user realizes that the system has stopped. One would ordinarily design a system such as this one to minimize the chance of the untolerated error: for example, by requiring supervision by a human user. The human user then is in a position to realize (perhaps from lack of response) that something has gone wrong. After the system restarts, the user knows to inquire whether or not the action completed. This design strategy should be familiar from our study of best-effort networks in Chapter 1. The lower layer (the computer system) is providing a best-effort implementation. A higher layer (the human user) supervises and, when necessary, retries. For example, suppose that the human user adds an appointment to the calendar but just as he or she clicks "save" the system crashes. The user doesn't know whether or not the addition actually succeeded, so when the system comes up again the first thing to do is open up the calendar to find out what happened.
Processor, memory, and operating system fault tolerance model.
This part of the model just specifies more precisely the intended fail-fast properties of the hardware and operating system:
- error-free operation: The processor, memory, and operating system all follow their specifications.
- detected error: Something fails in the hardware or operating system. The system is fail-fast: the hardware or operating system detects the failure and restarts from a clean slate before initiating any further
PUTs to the disk. - untolerated error: Something fails in the hardware or operating system. The processor muddles along and
PUTs corrupted data to the disk before detecting the failure.
The primary goal of the processor/memory/operating-system part of the model is to detect failures and stop running before any corrupted data is written to the disk storage system. The importance of detecting failure before the next disk write lies in error containment: if the goal is met, the designer can assume that the only values potentially in error must be in processor registers and volatile memory, and the data on the disk should be safe, with the exception described in Section 2.6.4.2: if there was a PUT to the disk in progress at the time of the crash, the failing system may have corrupted the disk buffer in volatile memory, and consequently corrupted the disk sector that was being written.
The recovery procedure can thus depend on the disk storage system to contain only uncorrupted information, or at most one corrupted disk sector. In fact, after restart the disk will contain the only information. "Restarts from a clean slate" means that the system discards all state held in volatile memory. This step brings the system to the same state as if a power failure had occurred, so a single recovery procedure will be able to handle both system crashes and power failures. Discarding volatile memory also means that all currently active threads vanish, so everything that was going on comes to an abrupt halt and will have to be restarted.
Disk storage system fault tolerance model.
Implementing all-or-nothing atomicity involves some steps that resemble the decay masking of MORE_DURABLE_PUT/GET in Chapter 2—in particular, the algorithm will write multiple copies of data. To clarify how the all-or-nothing mechanism works, we temporarily back up to CAREFUL_PUT/GET (see Section 2.6.4.5), which masks soft disk errors but not hard disk errors or disk decay. To simplify further, we pretend for the moment that a disk never decays and that it has no hard errors. (Since this perfect-disk assumption is obviously unrealistic, we will reverse it in Section 3.8, which describes an algorithm for all-or-nothing atomicity despite disk decay and hard errors.)
With the perfect-disk assumption, only one thing can go wrong: a system crash at just the wrong time. The fault tolerance model for this simplified careful disk system then becomes:
- error-free operation:
CAREFUL_GETreturns the result of the most recent call toCAREFUL_PUTatsector_numberontrack, withstatus = OK. - detectable error: The operating system crashes during a
CAREFUL_PUTand corrupts the disk buffer in volatile storage, andCAREFUL_PUTwrites corrupted data on one sector of the disk.
We can classify the error as "detectable" if we assume that the application has included with the data an end-to-end checksum, calculated before calling CAREFUL_PUT and thus before the system crash could have corrupted the data.
The change in this revision of the careful storage layer is that when a system crash occurs, one sector on the disk may be corrupted, but the client of the interface is confident that (1) that sector is the only one that may be corrupted and (2) if it has been corrupted, any later reader of that sector will detect the problem. Between the processor model and the storage system model, all anticipated failures now lead to the same situation: the system detects the failure, resets all processor registers and volatile memory, forgets all active threads, and restarts. No more than one disk sector is corrupted.
Our problem is now reduced to providing the all-or-nothing property: the goal is to create all-or-nothing disk storage, which guarantees either to change the data on a sector completely and correctly or else appear to future readers not to have touched it at all. Here is one simple, but somewhat inefficient, scheme that makes use of virtualization: assign, for each data sector that is to have the all-or-nothing property, three physical disk sectors, identified as S1, S2, and S3. The three physical sectors taken together are a virtual "all-or-nothing sector." At each place in the system where this disk sector was previously used, replace it with the all-or-nothing sector, identified by the triple {S1, S2, S3}. We start with an almost correct all-or-nothing implementation named ALMOST_ALL_OR_NOTHING_PUT, find a bug in it, and then fix the bug, finally creating a correct ALL_OR_NOTHING_PUT.
When asked to write data, ALMOST_ALL_OR_NOTHING_PUT writes it three times, on S1, S2, and S3, in that order, each time waiting until the previous write finishes so that if the system crashes only one of the three sectors will be affected. To read data, ALL_OR_NOTHING_GET reads all three sectors and compares their contents. If the contents of S1 and S2 are identical, ALL_OR_NOTHING_GET returns that value as the value of the all-or-nothing sector. If S1 and S2 differ, ALL_OR_NOTHING_GET returns the contents of S3 as the value of the all-or-nothing sector. Figure \(\PageIndex{1}\) shows this almost correct pseudocode.
.png?revision=1)
Figure \(\PageIndex{1}\): Algorithms for ALMOST_ALL_OR_NOTHING_PUT and ALL_OR_NOTHING_GET.
Let’s explore how this implementation behaves on a system crash. Suppose that at some previous time a record has been correctly stored in an all-or-nothing sector (in other words, all three copies are identical), and someone now updates it by calling ALL_OR_NOTHING_PUT. The goal is that even if a failure occurs in the middle of the update, a later reader can always be ensured of getting some complete, consistent version of the record by invoking ALL_OR_NOTHING_GET.
Suppose that ALMOST_ALL_OR_NOTHING_PUT were interrupted by a system crash some time before it finishes writing sector S2, and thus corrupts either S1 or S2. In that case, when ALL_OR_NOTHING_GET reads sectors S1 and S2, they will have different values, and it is not clear which one to trust. Because the system is fail-fast, sector S3 would not yet have been touched by ALMOST_ALL_OR_NOTHING_PUT, so it still contains the previous value. Returning the value found in S3 thus has the desired effect of ALMOST_ALL_OR_NOTHING_PUT having done nothing.
Now, suppose that ALMOST_ALL_OR_NOTHING_PUT were interrupted by a system crash some time after successfully writing sector S2. In that case, the crash may have corrupted S3, but S1 and S2 both contain the newly updated value. ALL_OR_NOTHING_GET returns the value of S1, thus providing the desired effect of ALMOST_ALL_OR_NOTHING_PUT having completed its job.
So what’s wrong with this design? ALMOST_ALL_OR_NOTHING_PUT assumes that all three copies are identical when it starts. But a previous failure can violate that assumption. Suppose that ALMOST_ALL_OR_NOTHING_PUT is interrupted while writing S3. The next thread to call ALL_OR_NOTHING_GET finds data1 = data2 , so it uses data1 , as expected. The new thread then calls ALMOST_ALL_OR_NOTHING_PUT, but is interrupted while writing S2. Now, S1 doesn't equal S2, so the next call to ALMOST_ALL_OR_NOTHING_PUT returns the damaged S3.
The fix for this bug is for ALL_OR_NOTHING_PUT to guarantee that the three sectors be identical before updating. It can provide this guarantee by invoking a procedure named CHECK_AND_REPAIR as in Figure \(\PageIndex{2}\). CHECK_AND_REPAIR simply compares the three copies and, if they are not identical, it forces them to be identical.
.png?revision=1)
Figure \(\PageIndex{2}\): Algorithms for ALL_OR_NOTHING_PUT and CHECK_AND_REPAIR.
To see how this works, assume that someone calls ALL_OR_NOTHING_PUT at a time when all three of the copies do contain identical values, which we designate as "old." Because ALL_OR_NOTHING_PUT writes "new" values into S1, S2, and S3 one at a time and in order, even if there is a crash, at the next call to ALL_OR_NOTHING_PUT there are only seven possible data states for CHECK_AND_REPAIR to consider:
| data state 1 | data state 2 | data state 3 | data state 4 | data state 5 | data state 6 | data state 7 | |
|---|---|---|---|---|---|---|---|
sector S1 |
old | bad | new | new | new | new | new |
sector S2 |
old | old | old | bad | new | new | new |
sector S3 |
old | old | old | old | old | bad | new |
The way to read this table is as follows: if all three sectors S1, S2, and S3 contain the "old" value, the data is in state 1. Now, if CHECK_AND_REPAIR discovers that all three copies are identical (line 8 in Figure \(\PageIndex{2}\)), the data is in state 1 or state 7 so CHECK_AND_REPAIR simply returns. Failing that test, if the copies in sectors S1 and S2 are identical (line 9), the data must be in state 5 or state 6, so CHECK_AND_REPAIR forces sector S3 to match the others and returns (line 10). If the copies in sectors S2 and S3 are identical the data must be in state 2 or state 3 (line 11), so CHECK_AND_REPAIR forces sector S1 to match and returns (line 12). The only remaining possibility is that the data is in state 4, in which case sector S2 is surely bad, but sector S1 contains a new value and sector S3 contains an old one. The choice of which to use is arbitrary; as shown the procedure copies the new value in sector S1 to both sectors S2 and S3.
What if a failure occurs while running CHECK_AND_REPAIR? That procedure systematically drives the state either forward from state 4 toward state 7, or backward from state 3 toward state 1. If CHECK_AND_REPAIR is itself interrupted by another system crash, rerunning it will continue from the point at which the previous attempt left off.
We can make several observations about the algorithm implemented by ALL_OR_NOTHING_GET and ALL_OR_NOTHING_PUT:
- This all-or-nothing atomicity algorithm assumes that only one thread at a time tries to execute either
ALL_OR_NOTHING_GETorALL_OR_NOTHING_PUT. This algorithm implements all-or-nothing atomicity but not before-or-after atomicity. CHECK_AND_REPAIRis idempotent. That means that a thread can start the procedure, execute any number of its steps, be interrupted by a crash, and go back to the beginning again any number of times with the same ultimate result, as far as a later call toALL_OR_NOTHING_GETis concerned.- The completion of the
CAREFUL_PUTon line 3 ofALMOST_ALL_OR_NOTHING_PUT, marked "commit point," exposes the new data to futureALL_OR_NOTHING_GETactions. Until that step begins execution, a call toALL_OR_NOTHING_GETsees the old data. After line 3 completes, a call toALL_OR_NOTHING_GETsees the new data. - Although the algorithm writes three replicas of the data, the primary reason for the replicas is not to provide durability as described in Section 2.6. Instead, the reason for writing three replicas, one at a time and in a particular order, is to ensure observance at all times and under all failure scenarios of the golden rule of atomicity, which is the subject of the next section.
There are several ways of implementing all-or-nothing disk sectors. Near the end of Chapter 2 we introduced a fault tolerance model for decay events that did not mask system crashes, and applied the technique known as RAID to mask decay to produce durable storage. Here we started with a slightly different fault tolerance model that omits decay, and we devised techniques to mask system crashes and produce all-or-nothing storage. What we really should do is start with a fault tolerance model that considers both system crashes and decay, and devise storage that is both all-or-nothing and durable. Such a model, devised by Xerox Corporation researchers Butler Lampson and Howard Sturgis, is the subject of Section 3.8, together with the more elaborate recovery algorithms it requires. That model has the additional feature that it needs only two physical sectors for each all-or-nothing sector.
Systematic Atomicity: Commit and the Golden Rule
The example of ALL_OR_NOTHING_PUT and ALL_OR_NOTHING_GET demonstrates an interesting special case of all-or-nothing atomicity, but it offers little guidance on how to systematically create a more general all-or-nothing action. From the example, our calendar program now has a tool that allows writing individual sectors with the all-or-nothing property, but that is not the same as safely adding an event to a calendar, since adding an event probably requires rearranging a data structure, which in turn may involve writing more than one disk sector. We could do a series of ALL_OR_NOTHING_PUT s to the several sectors, to ensure that each sector is itself written in an all-or-nothing fashion, but a crash that occurs after writing one and before writing the next would leave the overall calendar addition in a partly-done state. To make the entire calendar addition action all-or-nothing we need a generalization.
Ideally, one might like to be able to take any arbitrary sequence of instructions in a program, surround that sequence with some sort of begin and end statements as in Figure \(\PageIndex{3}\), and expect that the language compilers and operating system will perform some magic that makes the surrounded sequence into an all-or-nothing action. Unfortunately, no one knows how to do that. But we can come close, if the programmer is willing to make a modest concession to the requirements of all-or-nothing atomicity. This concession is expressed in the form of a discipline on the constituent steps of the all-or-nothing action.
.png?revision=1)
Figure \(\PageIndex{3}\): Imaginary semantics for painless programming of all-or-nothing actions.
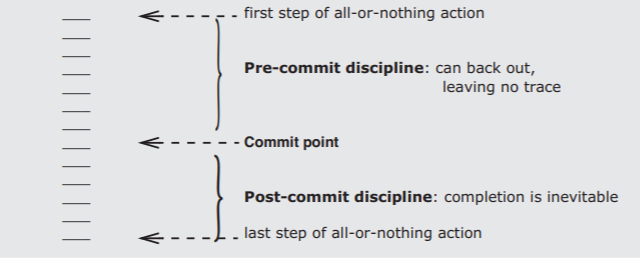
The discipline starts by identifying some single step of the sequence as the commit point. The all-or-nothing action is thus divided into two phases, a pre-commit phase and a post-commit phase, as suggested by Figure \(\PageIndex{4}\). During the pre-commit phase, the disciplining rule of design is that no matter what happens, it must be possible to back out of this all-or-nothing action in a way that leaves no trace. During the post-commit phase the disciplining rule of design is that no matter what happens, the action must run to the end successfully. Thus an all-or-nothing action can have only two outcomes. If the all-or-nothing action starts and then, without reaching the commit point, backs out, we say that it aborts. If the all-or-nothing action passes the commit point, we say that it commits.
.png?revision=1)
Figure \(\PageIndex{4}\): The commit point of an all-or-nothing action.
We can make several observations about the restrictions of the pre-commit phase. The pre-commit phase must identify all the resources needed to complete the all-or-nothing action, and establish their availability. The names of data should be bound, permissions should be checked, the pages to be read or written should be in memory, removable media should be mounted, stack space must be allocated, etc. In other words, all the steps needed to anticipate the severe run-to-the-end-without-faltering requirement of the post-commit phase should be completed during the pre-commit phase. In addition, the pre-commit phase must maintain the ability to abort at any instant. Any changes that the pre-commit phase makes to the state of the system must be undoable in case this all-or-nothing action aborts. Usually, this requirement means that shared resources, once reserved, cannot be released until the commit point is passed. The reason is that if an all-or-nothing action releases a shared resource, some other, concurrent thread may capture that resource. If the resource is needed in order to undo some effect of the all-or-nothing action, releasing the resource is tantamount to abandoning the ability to abort. Finally, the reversibility requirement means that the all-or-nothing action should not do anything externally visible, for example printing a check or firing a missile, prior to the commit point. (It is possible, though more complicated, to be slightly less restrictive. Sidebar \(\PageIndex{1}\) explores that possibility.)
Sidebar \(\PageIndex{1}\)
- Cascaded aborts
-
(Temporary) sweeping simplification. In this initial discussioin of commit points, we are intentionally avoiding a more complex and harder-to-design possibility. Some systems allow other, concurrent activities to see pending results, and they may even allow externally visible actions before commit. Those systems must therefore be prepared to track down and abort those concurrent activities (this tracking down is called cascaded abort) or perform compensating external actions (e.g., send a letter requesting return of the check or apologizing for the missile firing). The discussion of layers and multiple sites in Chapter 4 introduces a simple version of cascaded abort.
In contrast, the post-commit phase can expose results, it can release reserved resources that are no longer needed, and it can perform externally visible actions such as printing a check, opening a cash drawer, or drilling a hole. But it cannot try to acquire additional resources because an attempt to acquire might fail, and the post-commit phase is not permitted the luxury of failure. The post-commit phase must confine itself to finishing just the activities that were planned during the pre-commit phase.
It might appear that if a system fails before the post-commit phase completes, all hope is lost, so the only way to ensure all-or-nothing atomicity is to always make the commit step the last step of the all-or-nothing action. Often, that is the simplest way to ensure all-or-nothing atomicity, but the requirement is not actually that stringent. An important feature of the post-commit phase is that it is hidden inside the layer that implements the all-or-nothing action, so a scheme that ensures that the post-commit phase completes after a system failure is acceptable, so long as this delay is hidden from the invoking layer. Some all-or-nothing atomicity schemes thus involve a guarantee that a cleanup procedure will be invoked following every system failure, or as a prelude to the next use of the data, before anyone in a higher layer gets a chance to discover that anything went wrong. This idea should sound familiar: the implementation of ALL_OR_NOTHING_PUT in Figure \(\PageIndex{2}\) used this approach, by always running the cleanup procedure named CHECK_AND_REPAIR before updating the data.
A popular technique for achieving all-or-nothing atomicity is called the shadow copy. It is used by text editors, compilers, calendar management programs, and other programs that modify existing files, to ensure that following a system failure the user does not end up with data that is damaged or that contains only some of the intended changes:
- Pre-commit: Create a complete duplicate working copy of the file that is to be modified. Then, make all changes to the working copy.
- Commit point: Carefully exchange the working copy with the original. Typically this step is bootstrapped, using a lower-layer
RENAMEentry point of the file system that provides certain atomic-like guarantees. - Post-commit: Release the space that was occupied by the original.
The ALL_OR_NOTHING_PUT algorithm of Figure \(\PageIndex{2}\) can be seen as a particular example of the shadow copy strategy, which itself is a particular example of the general pre-commit/post-commit discipline. The commit point occurs at the instant when the new value of S2 is successfully written to the disk. During the pre-commit phase, while ALL_OR_NOTHING_PUT is checking over the three sectors and writing the shadow copy S1, a crash will leave no trace of that activity (that is, no trace that can be discovered by a later caller of ALL_OR_NOTHING_GET). The post-commit phase of ALL_OR_NOTHING_PUT consists of writing S3.
From these examples we can extract an important design principle:
The Golden Rule of Atomicity
Never modify the only copy!
In order for a composite action to be all-or-nothing, there must be some way of reversing the effect of each of its pre-commit phase component actions, so that if the action does not commit it is possible to back out. As we continue to explore implementations of all-or-nothing atomicity, we will notice that correct implementations always reduce at the end to making a shadow copy. The reason is that this structure ensures that the implementation follows the golden rule.
Systematic All-or-Nothing Atomicity: Version Histories
This section develops a scheme to provide all-or-nothing atomicity in the general case of a program that modifies arbitrary data structures. It will be easy to see why the scheme is correct, but the mechanics can interfere with performance. Section 3.4 of this chapter then introduces a variation on the scheme that requires more thought to see why it is correct, but that allows higher-performance implementations. As before, we concentrate for the moment on all-or-nothing atomicity. While some aspects of before-or-after atomicity will also emerge, we leave a systematic treatment of that topic for discussion in Section 3.4 and Section 3.5 of this chapter. Thus the model to keep in mind in this section is that only a single thread is running. If the system crashes, after a restart the original thread is gone—recall from Chapter 2 the sweeping simplification that threads are included in the volatile state that is lost on a crash and only durable state survives. After the crash, a new, different thread comes along and attempts to look at the data. The goal is that the new thread should always find that the all-or-nothing action that was in progress at the time of the crash either never started or completed successfully.
In looking at the general case, a fundamental difficulty emerges: random-access memory and disk usually appear to the programmer as a set of named, shared, and rewritable storage cells, called cell storage. Cell storage has semantics that are actually quite hard to make all-or-nothing because the act of storing destroys old data, thus potentially violating the golden rule of atomicity. If the all-or-nothing action later aborts, the old value is irretrievably gone; at best it can only be reconstructed from information kept elsewhere. In addition, storing data reveals it to the view of later threads, whether or not the all-or-nothing action that stored the value reached its commit point. If the all-or-nothing action happens to have exactly one output value, then writing that value into cell storage can be the mechanism of committing, and there is no problem. But if the result is supposed to consist of several output values, all of which should be exposed simultaneously, it is harder to see how to construct the all-or-nothing action. Once the first output value is stored, the computation of the remaining outputs has to be successful; there is no going back. If the system fails and we have not been careful, a later thread may see some old and some new values.
These limitations of cell storage did not plague the shopkeepers of Padua, who in the 14th century invented double-entry bookkeeping. Their storage medium was leaves of paper in bound books, and they made new entries with quill pens. They never erased or even crossed out entries that were in error; when they made a mistake they made another entry that reversed the mistake, thus leaving a complete history of their actions, errors, and corrections in the book. It wasn’t until the 1950s, when programmers began to automate bookkeeping systems, that the notion of overwriting data emerged. Up until that time, if a bookkeeper collapsed and died while making an entry, it was always possible for someone else to seamlessly take over the books. This observation about the robustness of paper systems suggests that there is a form of the golden rule of atomicity that might allow one to be systematic: never erase anything.
Examining the shadow copy technique used by the text editor provides a second useful idea. The essence of the mechanism that allows a text editor to make several changes to a file, yet not reveal any of the changes until it is ready, is this: the only way another prospective reader of a file can reach it is by name. Until commit time the editor works on a copy of the file that is either not yet named or has a unique name not known outside the thread, so the modified copy is effectively invisible. Renaming the new version is the step that makes the entire set of updates simultaneously visible to later readers.
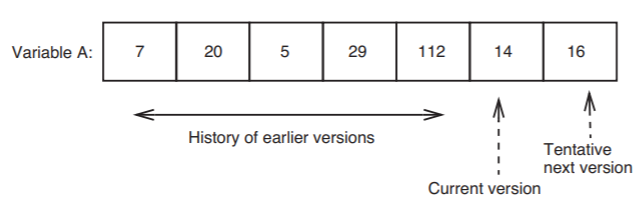
These two observations suggest that all-or-nothing actions would be better served by a model of storage that behaves differently from cell storage: instead of a model in which a store operation overwrites old data, we instead create a new, tentative version of the data, such that the tentative version remains invisible to any reader outside this all-or-nothing action until the action commits. We can provide such semantics, even though we start with traditional cell memory, by interposing a layer between the cell storage and the program that reads and writes data. This layer implements what is known as journal storage. The basic idea of journal storage is straightforward: we associate with every named variable not a single cell, but a list of cells in non-volatile storage; the values in the list represent the history of the variable. Figure \(\PageIndex{5}\) illustrates.
.png?revision=1)
Figure \(\PageIndex{5}\): Version history of a variable in journal storage.
Whenever any action proposes to write a new value into the variable, the journal storage manager appends the prospective new value to the end of the list. Clearly this approach, being history-preserving, offers some hope of being helpful because if an all-or-nothing action aborts, one can imagine a systematic way to locate and discard all of the new versions it wrote. Moreover, we can tell the journal storage manager to expect to receive tentative values, but to ignore them unless the all-or-nothing action that created them commits. The basic mechanism to accomplish such an expectation is quite simple; the journal storage manager should make a note, next to each new version, of the identity of the all-or-nothing action that created it. Then, at any later time, it can discover the status of the tentative version by inquiring whether or not the all-or-nothing action ever committed.
Figure \(\PageIndex{6}\) illustrates the overall structure of such a journal storage system, implemented as a layer that hides a cell storage system. (To reduce clutter, this journal storage system omits calls to create new and delete old variables.) In this particular model, we assign to the journal storage manager most of the job of providing tools for programming all-or-nothing actions. Thus the implementer of a prospective all-or-nothing action should begin that action by invoking the journal storage manager entry NEW_ACTION, and later complete the action by invoking either COMMIT or ABORT. If, in addition, actions perform all reads and writes of data by invoking the journal storage manager's READ_CURRENT_VALUE and WRITE_NEW_VALUE entries, our hope is that the result will automatically be all-or-nothing with no further concern of the implementer.
.png?revision=1)
Figure \(\PageIndex{6}\): Interface to and internal organization of an all-or-nothing storage system based on version histories and journal storage.
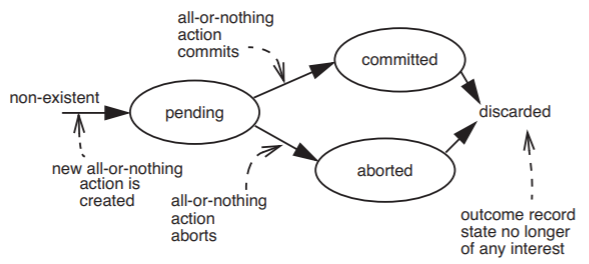
How could this automatic all-or-nothing atomicity work? The first step is that the journal storage manager, when called at NEW_ACTION, should assign a nonce identifier to the prospective all-or-nothing action, and create, in non-volatile cell storage, a record of this new identifier and the state of the new all-or-nothing action. This record is called an outcome record; it begins its existence in the state PENDING; depending on the outcome it should eventually move to one of the states COMMITTED or ABORTED, as suggested by Figure \(\PageIndex{7}\). No other state transitions are possible, except to discard the outcome record once there is no further interest in its state. Figure \(\PageIndex{8}\) illustrates implementations of the three procedures NEW_ACTION, COMMIT, and ABORT.
.png?revision=1)
Figure \(\PageIndex{7}\): The allowed state transitions of an outcome record.
.png?revision=1)
Figure \(\PageIndex{8}\): The procedures NEW_ACTION, COMMIT, and ABORT.
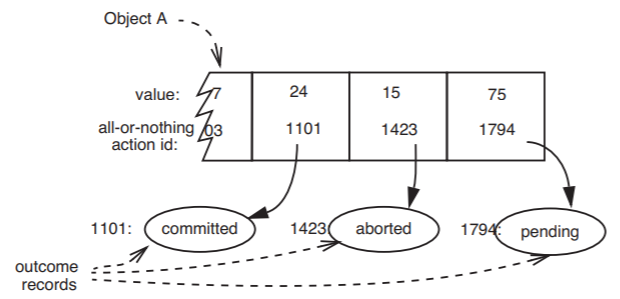
When an all-or-nothing action calls the journal storage manager to write a new version of some data object, that action supplies the identifier of the data object, a tentative new value for the new version, and the identifier of the all-or-nothing action. The journal storage manager calls on the lower-level storage management system to allocate in nonvolatile cell storage enough space to contain the new version; it places in the newly allocated cell storage the new data value and the identifier of the all-or-nothing action. Thus the journal storage manager creates a version history as illustrated in Figure \(\PageIndex{9}\). Now, when someone proposes to read a data value by calling READ_CURRENT_VALUE, the journal storage manager can review the version history, starting with the latest version and return the value in the most recent committed version. By inspecting the outcome records, the journal storage manager can ignore those versions that were written by all-or-nothing actions that aborted or that never committed.
.png?revision=1)
Figure \(\PageIndex{9}\): Portion of a version history, with outcome records. Some thread has recently called WRITE_NEW_VALUE specifying data_id = A , new_value = 75, and client_id = 1794. A caller to READ_CURRENT_VALUE will read the value 24 for A.
The procedures READ_CURRENT_VALUE and WRITE_NEW_VALUE thus follow the algorithms of Figure \(\PageIndex{10}\). The important property of this pair of algorithms is that if the current all-or-nothing action is somehow derailed before it reaches its call to COMMIT, the new version it has created is invisible to invokers of READ_CURRENT_VALUE. (They are also invisible to the all-or-nothing action that wrote them. Since it is sometimes convenient for an all-or-nothing action to read something that it has tentatively written, a different procedure, named READ_MY_PENDING_VALUE, identical to READ_CURRENT_VALUE except for a different test on line 6, could do that.) Moreover if, for example, all-or-nothing action 99 crashes while partway through changing the values of nineteen different data objects, all nineteen changes would be invisible to later invokers of READ_CURRENT_VALUE. If all-or-nothing action 99 does reach its call to COMMIT, that call commits the entire set of changes simultaneously and atomically, at the instant that it changes the outcome record from PENDING to COMMITTED. Pending versions would also be invisible to any concurrent action that reads data with READ_CURRENT_VALUE, a feature that will prove useful when we introduce concurrent threads and discuss before-or-after atomicity, but for the moment our only concern is that a system crash may prevent the current thread from committing or aborting, and we want to make sure that a later thread doesn’t encounter partial results. As in the case of the calendar manager of Section 3.3.1 above, we assume that when a crash occurs, any all-or-nothing action that was in progress at the time was being supervised by some outside agent who realizes that a crash has occurred, uses READ_CURRENT_VALUE to find out what happened, and if necessary initiates a replacement all-or-nothing action.
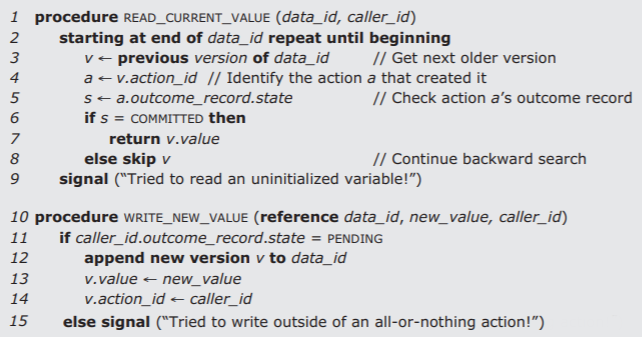
Figure \(\PageIndex{10}\): Algorithms followed by READ_CURRENT_VALUE and WRITE_NEW_VALUE. The parameter caller_id is the action identifier returned by NEW_ACTION. In this version, only WRITE_NEW_VALUE uses caller_id . Later, READ_CURRENT_VALUE will also use it. Note: The last line of psuedocode in the figure ("else signal") should be numbered 15 and aligned with the "if" on line 11.
.png?revision=1)
Figure \(\PageIndex{11}\): An all-or-nothing TRANSFER procedure, based on journal storage. (This program assumes that it is the only running thread. Making the transfer procedure a before-or-after action because other threads might be updating the same accounts concurrently requires additional mechanism that is discussed later in this chapter.)
Figure \(\PageIndex{11}\) shows the TRANSFER procedure of Section 3.2.5 reprogrammed as an all-or-nothing (but not, for the moment, before-or-after) action using the version history mechanism. This implementation of TRANSFER is more elaborate than the earlier one—it tests to see whether or not the account to be debited has enough funds to cover the transfer and if not it aborts the action. The order of steps in the transfer procedure is remarkably unconstrained by any consideration other than calculating the correct answer. The reading of credit_account , for example, could casually be moved to any point between NEW_ACTION and the place where yvalue is recalculated. We conclude that the journal storage system has made the pre-commit discipline much less onerous than we might have expected.
There is still one loose end: it is essential that updates to a version history and changes to an outcome record be all-or-nothing. That is, if the system fails while the thread is inside WRITE_NEW_VALUE, adjusting structures to append a new version, or inside COMMIT while updating the outcome record, the cell being written must not be muddled; it must either stay as it was before the crash or change to the intended new value. The solution is to design all modifications to the internal structures of journal storage so that they can be done by overwriting a single cell. For example, suppose that the name of a variable that has a version history refers to a cell that contains the address of the newest version, and that versions are linked from the newest version backwards, by address references. Adding a version consists of allocating space for a new version, reading the current address of the prior version, writing that address in the backward link field of the new version, and then updating the descriptor with the address of the new version. That last update can be done by overwriting a single cell. Similarly, updating an outcome record to change it from PENDING to COMMITTED can be done by overwriting a single cell.
As a first bootstrapping step, we have reduced the general problem of creating all-or-nothing actions to the specific problem of doing an all-or-nothing overwrite of one cell. As the remaining bootstrapping step, recall that we already know two ways to do a single-cell all-or-nothing overwrite: apply the ALL_OR_NOTHING_PUT procedure of Figure \(\PageIndex{2}\). (If there is concurrency, updates to the internal structures of the version history also need before-or-after atomicity. Section 3.5 will explore methods of providing it.)
How Version Histories are Used
The careful reader will note two possibly puzzling things about the version history scheme just described. Both will become less puzzling when we discuss concurrency and before-or-after atomicity in Section 3.5 of this chapter:
- Because
READ_CURRENT_VALUEskips over any version belonging to another all-or-nothing action whoseOUTCOMErecord is notCOMMITTED, it isn't really necessary to change theOUTCOMErecord when an all-or-nothing action aborts; the record could just remain in thePENDINGstate indefinitely. However, when we introduce concurrency, we will find that a pending action may prevent other threads from reading variables for which the pending action created a new version, so it will become important to distinguish aborted actions from those that really are still pending. - As we have defined
READ_CURRENT_VALUE, versions older than the most recent committed version are inaccessible and they might just as well be discarded. Discarding could be accomplished either as an additional step in the journal storage manager, or as part of a separate garbage collection activity. Alternatively, those older versions may be useful as an historical record, known as an archive, with the addition of timestamps on commit records and procedures that can locate and return old values created at specified times in the past. For this reason, a version history system is sometimes called a temporal database or is said to provide time domain addressing. The banking industry abounds in requirements that make use of history information, such as reporting a consistent sum of balances in all bank accounts, paying interest on the fifteenth on balances as of the first of the month, or calculating the average balance last month. Another reason for not discarding old versions immediately will emerge when we discuss concurrency and before-or-after atomicity: concurrent threads may, for correctness, need to read old versions even after new versions have been created and committed.
Direct implementation of a version history raises concerns about performance: rather than simply reading a named storage cell, one must instead make at least one indirect reference through a descriptor that locates the storage cell containing the current version. If the cell storage device is on a magnetic disk, this extra reference is a potential bottleneck, though it can be alleviated with a cache. A bottleneck that is harder to alleviate occurs on updates. Whenever an application writes a new value, the journal storage layer must allocate space in unused cell storage, write the new version, and update the version history descriptor so that future readers can find the new version. Several disk writes are likely to be required. These extra disk writes may be hidden inside the journal storage layer and with added cleverness may be delayed until commit and batched, but they still have a cost. When storage access delays are the performance bottleneck, extra accesses slow things down.
In consequence, version histories are used primarily in low-performance applications. One common example is found in revision management systems used to coordinate teams doing program development. A programmer "checks out" a group of files, makes changes, and then "checks in" the result. The check-out and check-in operations are all-or-nothing, and check-in makes each changed file the latest version in a complete history of that file in case a problem is discovered later. (The check-in operation also verifies that no one else changed the files while they were checked out, which catches some, but not all, coordination errors.) A second example is that some interactive applications such as word processors or image editing systems provide a “deep undo” feature, which allows a user who decides that his or her recent editing is misguided to step backwards to reach an earlier, satisfactory state. A third example appears in file systems that automatically create a new version every time any application opens an existing file for writing; when the application closes the file, the file system tags a number suffix to the name of the previous version of the file and moves the original name to the new version. These interfaces employ version histories because users find them easy to understand and they provide all-or-nothing atomicity in the face of both system failures and user mistakes. Most such applications also provide an archive that is useful for reference and that allows going back to a known good version.
Applications requiring high performance are a different story. They, too, require all-or-nothing atomicity, but they usually achieve it by applying a specialized technique called a log. Logs are our next topic.