
2.8: Equilibrium of Rectangular Plates
- Page ID
- 21698

A step-by-step derivation of the equation of equilibrium and boundary conditions for rectangular plates is presented in the lecture notes of the course 2.081 Plates and Shells. This equation takes the following form in the tensor notation
\[M_{\alpha \beta,\alpha \beta} + p = 0 \]
and in the extended notation
\[\frac{\partial^2 M_{xx}}{\partial x^2} + 2\frac{\partial^2 M_{xy}}{\partial x \partial y} + \frac{\partial^2 M_{yy}}{\partial y^2} + p = 0 \label{3.82}\]
Recall that the dimensions of the bending moments in plates are \([\text{Nm/m}] = [N ]\). In the case of cylindrical bending the twist \(M_{xy}\) and \(M_{yy}\) vanish. Multiplying Equation \ref{3.82} by the width \(b\), one gets
\[\frac{d^2}{dx^2} [bM_{xx}] + q = 0\]
which is identical to the previously derived equation equilibrium of a beam, Equation (2.6.20). Therefore wide beams are a special class of rectangular plates.
The boundary conditions for plates are similar to those for beams in the local coordinate system at the edges, \((n, t)\), Figure (\(\PageIndex{1}\)).
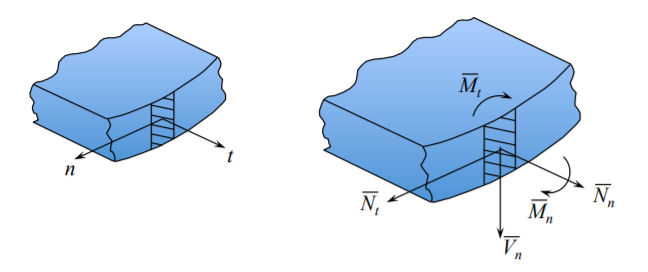
Therefore Equations (2.5.13-2.5.15) for beams should now read
\[ (M_n - \bar{M}_n) \delta w^{\prime} = 0 \]
\[ (V_n - \bar{V}_n) \delta w = 0\]
\[ (N_n - \bar{N}_n) \delta u_n = 0\]
\[ (N_t - \bar{N}_t) \delta u_t = 0\]