
5.4: Linear Viscoelasticity
- Page ID
- 44548
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)1. Introduction
This document is intended to outline an important aspect of the mechanical response of polymers and polymer-matrix composites: the field of linear viscoelasticity. The topics included here are aimed at providing an instructional introduction to this large and elegant subject, and should not be taken as a thorough or comprehensive treatment. The references appearing either as footnotes to the text or listed separately at the end of the notes should be consulted for more thorough coverage.
Viscoelastic response is often used as a probe in polymer science, since it is sensitive to the material’s chemistry and microstructure. The concepts and techniques presented here are important for this purpose, but the principal objective of this document is to demonstrate how linear viscoelasticity can be incorporated into the general theory of mechanics of materials, so that structures containing viscoelastic components can be designed and analyzed.
While not all polymers are viscoelastic to any important practical extent, and even fewer are linearly viscoelastic(For an overview of nonlinear viscoelastic theory, see for instance W.N. Findley et al., Creep and Relaxation of Nonlinear Viscoelastic Materials, Dover Publications, New York, 1989.), this theory provides a usable engineering approximation for many applications in polymer and composites engineering. Even in instances requiring more elaborate treatments, the linear viscoelastic theory is a useful starting point.
2. Molecular Mechanisms
When subjected to an applied stress, polymers may deform by either or both of two fundamentally different atomistic mechanisms. The lengths and angles of the chemical bonds connecting the atoms may distort, moving the atoms to new positions of greater internal energy. This is a small motion and occurs very quickly, requiring only \(\approx 10^{-12}\) seconds.
If the polymer has sufficient molecular mobility, larger-scale rearrangements of the atoms may also be possible. For instance, the relatively facile rotation around backbone carbon-carbon single bonds can produce large changes in the conformation of the molecule. Depending on the mobility, a polymer molecule can extend itself in the direction of the applied stress, which decreases its conformational entropy (the molecule is less "disordered"). Elastomers -- rubber -- respond almost wholly by this entropic mechanism, with little distortion of their covalent bonds or change in their internal energy.
The combined first and second laws of thermodynamics state how an increment of mechanical work \(f\ dx\) done on the system can produce an increase in the internal energy \(dU\) or a decrease in the entropy \(dS\):
\[f\ dx = dU - T\ dS \nonumber \]
Clearly, the relative importance of the entropic contribution increases with temperature \(T\), and this provides a convenient means of determining experimentally whether the material’s stiffness in energetic or entropic in origin. The retractive force needed to hold a rubber band at fixed elongation will increase with increasing temperature, as the increased thermal agitation will make the internal structure more vigorous in its natural attempts to restore randomness. But the retractive force in a stretched steel specimen — which shows little entropic elasticity — will decrease with temperature, as thermal expansion will act to relieve the internal stress.
In contrast to the instantaneous nature of the energetically controlled elasticity, the con- formational or entropic changes are processes whose rates are sensitive to the local molecular mobility. This mobility is influenced by a variety of physical and chemical factors, such as molecular architecture, temperature, or the presence of absorbed fluids which may swell the polymer. Often, a simple mental picture of "free volume" — roughly, the space available for molecular segments to act cooperatively so as to carry out the motion or reaction in question — is useful in intuiting these rates.
These rates of conformational change can often be described with reasonable accuracy by Arrhenius-type expressions of the form
\[\text{rate} \propto \exp \dfrac{-E^\dagger}{RT} \nonumber \]
where \(E^\dagger\) is an apparent activation energy of the process and \(R = 8.314J/mol - ^{\circ}K\) is the Gas Constant. At temperatures much above the "glass transition temperature," labeled \(T_g\) in Figure 1, the rates are so fast as to be essentially instantaneous, and the polymer acts in a rubbery manner in which it exhibits large, instantaneous, and fully reversible strains in response to an applied stress.
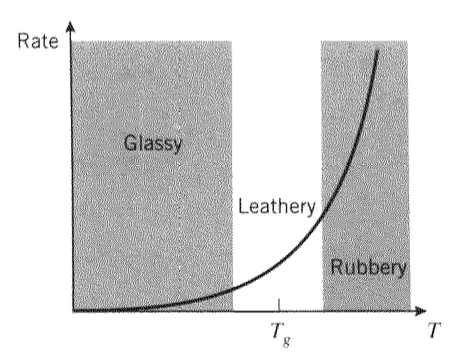
Conversely, at temperatures much less than \(T_g\), the rates are so slow as to be negligible. Here the chain uncoiling process is essentially "frozen out," so the polymer is able to respond only by bond stretching. It now responds in a "glassy" manner, responding instantaneously and reversibly but being incapable of being strained beyond a few percent before fracturing in a brittle manner.
In the range near \(T_g\), the material is midway between the glassy and rubbery regimes. Its response is a combination of viscous fluidity and elastic solidity, and this region is termed "leathery," or, more technically, "viscoelastic". The value of \(T_g\) is an important descriptor of polymer thermomechanical response, and is a fundamental measure of the material’s propensity for mobility. Factors that enhance mobility, such as absorbed diluents, expansive stress states, and lack of bulky molecular groups, all tend to produce lower values of \(T_g\). The transparent polyvinyl butyral film used in automobile windshield laminates is an example of a material that is used in the viscoelastic regime, as viscoelastic response can be a source of substantial energy dissipation during impact.
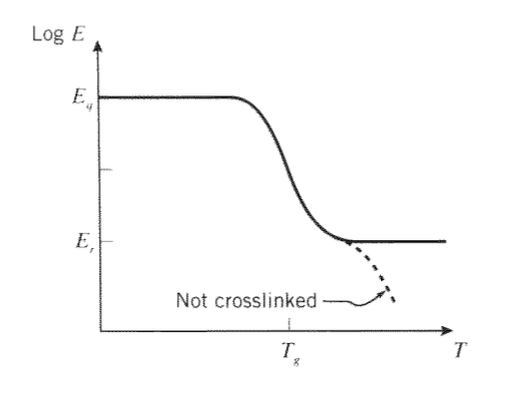
At temperatures well below \(T_g\), when entropic motions are frozen and only elastic bond deformations are possible, polymers exhibit a relatively high modulus, called the "glassy modulus" \(E_g\), which is on the order of 3 GPa (400 kpsi). As the temperature is increased through \(T_g\), the stiffness drops dramatically, by perhaps two orders of magnitude, to a value called the "rubbery modulus" \(E_r\). In elastomers that have been permanently crosslinked by sulphur vulcanization or other means, the value of \(E_r\) is determined primarily by the crosslink density; the kinetic theory of rubber elasticity gives the relation as
\[\sigma = NRT (\lambda - \dfrac{1}{\lambda^2}) \nonumber \]
where \(\sigma\) is the stress, \(N\) is the crosslink density (\(mol/m^3\)), and \(\lambda = L/L_0\) is the extension ratio. Differentiation of this expression gives the slope of the stress-strain curve at the origin as \(E_r = 3NRT\).
If the material is not crosslinked, the stiffness exhibits a short plateau due to the ability of molecular entanglements to act as network junctions; at still higher temperatures the entanglements slip and the material becomes a viscous liquid. Neither the glassy nor the rubbery modulus depends strongly on time, but in the vicinity of the transition near \(T_g\) time effects can be very important. Clearly, a plot of modulus versus temperature, such as is shown in Figure 2, is a vital tool in polymer materials science and engineering. It provides a map of a vital engineering property, and is also a fingerprint of the molecular motions available to the material.
3. Phenomenological Aspects
Experimentally, one seeks to characterize materials by performing simple laboratory tests from which information relevant to actual in-use conditions may be obtained. In the case of vis- coelastic materials, mechanical characterization often consists of performing uniaxial tensile tests similar to those used for elastic solids, but modified so as to enable observation of the time dependency of the material response. Although many such "viscoelastic tensile tests" have been used, one most commonly encounters only three: creep, stress relaxation, and dynamic (sinusoidal) loading.
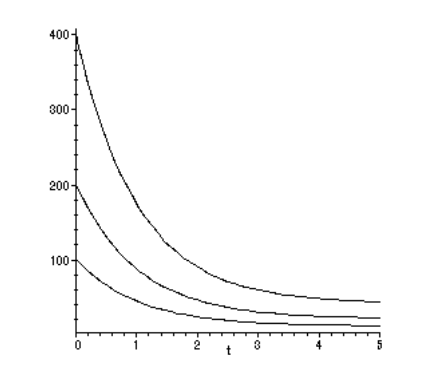
Creep
The creep test consists of measuring the time dependent strain \(\epsilon (t) = \delta (t)/L_0\) resulting from the application of a steady uniaxial stress \(\sigma_0\) as illustrated in Figure 3. These three curves are the strains measured at three different stress levels, each one twice the magnitude of the previous one.
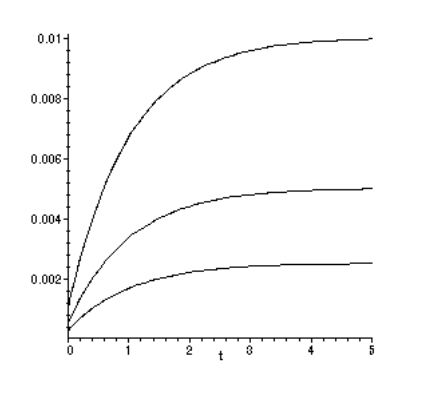
Note in Figure 3 that when the stress is doubled, the resulting strain in doubled over its full range of time. This occurs if the materials is linear in its response. If the strain-stress relation is linear, the strain resulting from a stress \(a\sigma\), where \(a\) is a constant, is just the constant \(a\) times the strain resulting from \(\sigma\) alone. Mathematically,
\(\epsilon (a \sigma) = a\epsilon (\sigma)\)
This is just a case of "double the stress, double the strain."
If the creep strains produced at a given time are plotted as the abscissa against the applied stress as the ordinate, an "isochronous" stress-strain curve would be produced. If the material is linear, this "curve" will be a straight line, with a slope that increases as the chosen time is decreased.
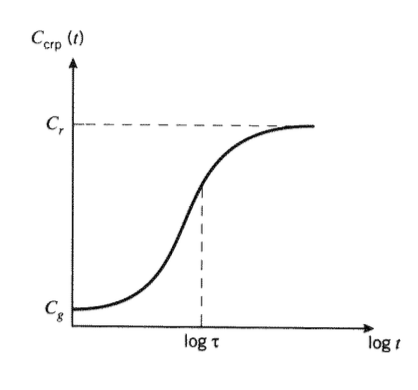
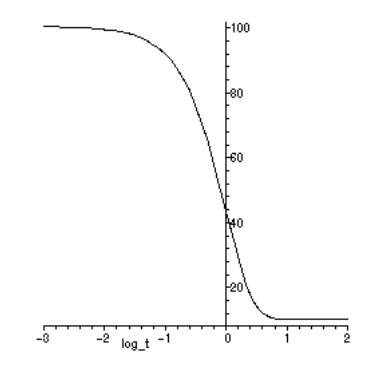
For linear materials, the family of strain histories \(\epsilon (t)\) obtained at various constant stresses may be superimposed by normalizing them based on the applied stress. The ratio of strain to stress is called the "compliance" \(C\), and in the case of time-varying strain arising from a constant stress the ratio is the "creep compliance":
\(C_{crp} (t) = \dfrac{\epsilon (t)}{\sigma_0}\)
A typical form of this function is shown in Figure 4, plotted against the logarithm of time. Note that the logarithmic form of the plot changes the shape of the curve drastically, stretching out the short-time portion of the response and compressing the long-time region. Upon loading, the material strains initially to the "glassy" compliance \(C_g\); this is the elastic deformation corresponding to bond distortion. In time, the compliance rises to an equilibrium or "rubbery" value \(C_r\), corresponding to the rubbery extension of the material. The value along the abscissa labeled "\(\log \tau\)" marks the inflection from rising to falling slope, and \(\tau\) is called the "relaxation time" of the creep process.
Stress relaxation
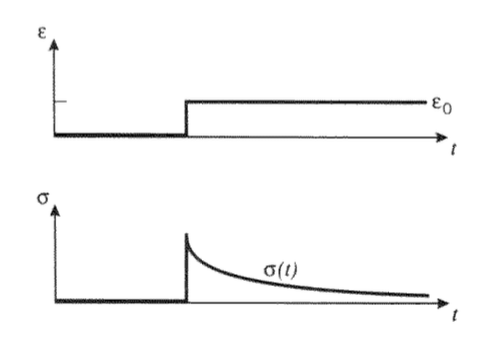
Another common test, easily conducted on Instron or other displacement-controlled machines, consists of monitoring the time-dependent stress resulting from a steady strain as seen in Figure 5. This is the converse of Figure 3; here the stress curves correspond to three different levels of constant strain, each one twice the magnitude of the previous one.
Analogously with creep compliance, one may superimpose the relaxation curves by means of the "relaxation modulus," defined as \(E_{rel}(t) = \sigma (t)/\epsilon_0\), plotted against log time in Figure 6. At short times, the stress is at a high plateau corresponding to a "glassy" modulus \(E_g\), and then falls exponentially to a lower equilibrium "rubbery" modulus \(E_r\) as the polymer molecules gradually accommodate the strain by conformational extension rather than bond distortion.
Creep and relaxation are both manifestations of the same molecular mechanisms, and one should expect that \(E_{rel}\) and \(C_{crp}\) are related. However even though \(E_g = 1/C_g\) and \(E_r = 1/C_r\), in general \(E_{rel} (t) \ne 1/C_{crp} (t)\). In particular, the relaxation response moves toward its equilibrium value more quickly than does the creep response.
Dynamic loading
Creep and stress relaxation tests are convenient for studying material response at long times (minutes to days), but less accurate at shorter times (seconds and less). Dynamic tests, in which the stress (or strain) resulting from a sinusoidal strain (or stress) is measured, are often well-suited for filling out the "short-time" range of polymer response. When a viscoelastic material is subjected to a sinusoidally varying stress, a steady state will eventually be reached(The time needed for the initial transient effect to die out will itself be dependent on the material’s viscoelastic response time, and in some situations this can lead to experimental errors. Exercise \(\PageIndex{5}\) develops the full form of the dynamic response, including the initial transient term.) in which the resulting strain is also sinusoidal, having the same angular frequency but retarded in phase by an angle \(\delta\); this is analogous to the delayed strain observed in creep experiments. The strain lags the stress by the phase angle \(\delta\), and this is true even if the strain rather than the stress is the controlled variable.
If the origin along the time axis is selected to coincide with a time at which the strain passes through its maximum, the strain and stress functions can be written as:
\[\epsilon = \epsilon_0 \cos \omega t \nonumber \]
\[\sigma = \sigma_0 \cos (\omega t + \delta \nonumber \]
Using an algebraic maneuver common in the analysis of reactive electrical circuits and other harmonic systems, it is convenient to write the stress function as a complex quantity \(\sigma^*\) whose real part is in phase with the strain and whose imaginary part is \(90^{\circ}\) out of phase with it:
\[\sigma^* = \sigma_0' \cos \omega t + i \sigma_0'' \sin \omega t \nonumber \]
Here \(i = \sqrt{-1}\) and the asterisk denotes a complex quantity as usual.
It can be useful to visualize the observable stress and strain as the projection on the real axis of vectors rotating in the complex plane at a frequency \(\omega\). If we capture their positions just as the strain vector passes the real axis, the stress vector will be ahead of it by the phase angle \(\delta\) as seen in Figure 7.
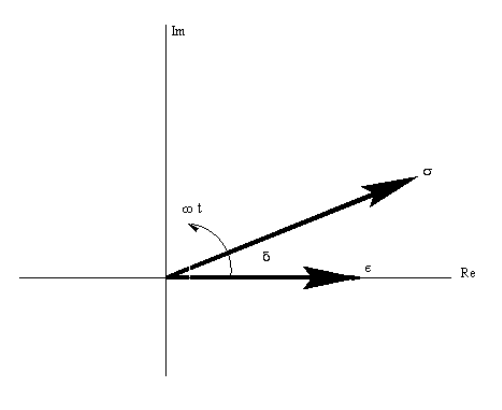
Figure 7 makes it easy to develop the relations between the various parameters in harmonic relations:
\[\tan \delta = \sigma_0''/\sigma_0' \nonumber \]
\[|\sigma^*| = \sigma_0 = \sqrt{(\sigma_0')^2 + (\sigma_0'')^2} \nonumber \]
\[\sigma_0' = \sigma_0 \cos \delta \nonumber \]
\[\sigma_0'' = \sigma_0 \sin \delta \nonumber \]
We can use this complex form of the stress function to define two different dynamic moduli, both being ratios of stress to strain as usual but having very different molecular interpretations and macroscopic consequences. The first of these is the "real," or "storage," modulus, defined as the ratio of the in-phase stress to the strain:
\[E' = \sigma_0' /\epsilon_0 \nonumber \]
The other is the "imaginary," or "loss," modulus, defined as the ratio of the out-of-phase stress to the strain:
\[E'' = \sigma_0''/\epsilon_0 \nonumber \]
The terms "storage" and "loss" can be understood more readily by considering the mechanical work done per loading cycle. The quantity and \(\int \sigma \ d\epsilon\) is the strain energy per unit volume (since \(\sigma = \text{force/area}\) and \(\epsilon = \text{distance/length}\)). Integrating the in-phase and out-of-phase components separately:
\[W = \oint \sigma d \epsilon = \oint \dfrac{d\epsilon}{dt}dt \nonumber \]
\[=\int_{0}^{2\pi/\omega} (\sigma_0' \cos \omega t)(-\epsilon_0 \omega \sin \omega t) dt + \int_{0}^{2\pi /\omega} (\sigma_0'' \sin \omega t) (-\epsilon_0 \omega \sin \omega t) dt \nonumber \]
\[= 0 - \pi \sigma_0'' \epsilon_0 \nonumber \]
Note that the in-phase components produce no net work when integrated over a cycle, while the out-of- phase components result in a net dissipation per cycle equal to:
\[W_{dis} = \pi \sigma_0'' \epsilon_0 = \pi \sigma_0 \epsilon_0 \sin \delta \nonumber \]
This should be interpreted to illustrate that the strain energy associated with the in-phase stress and strain is reversible; i.e. that energy which is stored in the material during a loading cycle can be recovered without loss during unloading. Conversely, energy supplied to the material by the out-of-phase components is converted irreversibly to heat.
The maximum energy stored by the in-phase components occurs at the quarter-cycle point, and this maximum stored energy is:
\[\begin{array} {rcl} {W_{st}} & = & {\int_{0}^{\pi /2\omega} (\sigma_0' \cos \omega t)(-\epsilon_0 \omega \sin \omega t) dt} \\ {} & = & {-\dfrac{1}{2} \sigma_0' \epsilon_0 = -\dfrac{1}{2} \sigma_0 \epsilon_0 \cos \delta} \end{array} \nonumber \]
The relative dissipation - the ratio of \(W_{dis}/W_{st}\) - is then related to the phase angle by:
\[\dfrac{W_{dis}}{W_{st}} = 2\pi \tan \delta \nonumber \]
We will also find it convenient to express the harmonic stress and strain functions as exponentials:
\[\sigma = \sigma_0^* e^{i \omega t} \nonumber \]
\[\epsilon = \epsilon_0^* e^{i \omega t} \nonumber \]
The \(e^{i \omega t}\) factor follows from the Euler relation \(e^{i\theta} = \cos \theta + i \sin \theta\), and writing both the stress and the strain as complex numbers removes the restriction of placing the origin at a time of maximum strain as was done above. The complex modulus can now be written simply as:
\[E^* = \sigma_0^* /\epsilon_0^* \nonumber \]
4. Mathematical Models for Linear Viscoelastic Response
4.1 The Maxwell Spring-Dashpot Model
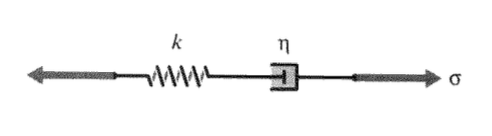
The time dependence of viscoelastic response is analogous to the time dependence of reactive electrical circuits, and both can be described by identical ordinary differential equations in time. A convenient way of developing these relations while also helping visualize molecular motions employs "spring-dashpot" models. These mechanical analogs use "Hookean" springs, depicted in Figure 8 and described by
\(\sigma = k\epsilon\)
where \(\sigma\) and \(\epsilon\) are analogous to the spring force and displacement, and the spring constant \(k\) is analogous to the Young’s modulus \(E\); \(k\) therefore has units of \(N/m^2\). The spring models the instantaneous bond deformation of the material, and its magnitude will be related to the fraction of mechanical energy stored reversibly as strain energy.

The entropic uncoiling process is fluidlike in nature, and can be modeled by a "Newtonian dashpot" also shown in Figure 8, in which the stress produces not a strain but a strain rate:
\(\sigma = \eta \dot{\epsilon}\)
Here the overdot denotes time differentiation and η is a viscosity with units of \(N-s/m^2\). In many of the relations to follow, it will be convenient to employ the ratio of viscosity to stiffness:
\(\tau = \dfrac{\eta}{k}\)
The unit of \(\tau\) is time, and it will be seen that this ratio is a useful measure of the response time of the material’s viscoelastic response.
The "Maxwell" solid shown in Figure 9 is a mechanical model in which a Hookean spring and a Newtonian dashpot are connected in series. The spring should be visualized as representing the elastic or energetic component of the response, while the dashpot represents the conformational or entropic component. In a series connection such as the Maxwell model, the stress on each element is the same and equal to the imposed stress, while the total strain is the sum of the strain in each element:
\(\sigma = \sigma_s = \sigma_d\)
\(\epsilon = \epsilon_s + \epsilon_d\)
Here the subscripts \(s\) and \(d\) represent the spring and dashpot, respectively. In seeking a single equation relating the stress to the strain, it is convenient to differentiate the strain equation and then write the spring and dashpot strain rates in terms of the stress:
\(\dot{\epsilon} = \dot{\epsilon_s} + \dot{\epsilon_d} = \dfrac{\dot{sigma}}{k} + \dfrac{\sigma}{\eta}\)
Multiplying by \(k\) and using \(\tau = \eta /k\):
\[k \dot{\epsilon} = \dot{\sigma} + \dfrac{1}{\tau} \sigma \nonumber \]
This expression is a "constitutive" equation for our fictitious Maxwell material, an equation that relates the stress to the strain. Note that it contains time derivatives, so that simple constant of proportionality between stress and strain does not exist. The concept of "modulus" – the ratio of stress to strain – must be broadened to account for this more complicated behavior.
Equation 5.4.22 can be solved for the stress \(\sigma (t)\) once the strain \(\epsilon (t)\) is specified, or for the strain if the stress is specified. Two examples will illustrate this process:
In a stress relaxation test, a constant strain \(\epsilon_0\) acts as the "input" to the material, and we seek an expression for the resulting time-dependent stress; this is depicted in Figure 10.
Since in stress relaxation \(\dot{\epsilon} = 0\), Equation 5.4.22 becomes
\(\dfrac{d \sigma}{dt} = -\dfrac{1}{\tau} \sigma\)
Separating variables and integrating:
Here the significance of \(\tau \equiv \eta /k\) as a characteristic "relaxation time" is evident; it is physically the time needed for the stress to fall to \(1/e\) of its initial value. It is also the time at which the stress function passes through an inflection when plotted against log time.
The relaxation modulus \(E_{rel}\) may be obtained from this relation directly, noting that initially only the spring will deform and the initial stress and strain are related by \(\sigma_0 = k \epsilon_0\). So
\(E_{rel} (t) = \dfrac{\sigma(t)}{\epsilon_0} = \dfrac{\sigma_0}{\epsilon_0} \exp (-t/\tau)\)
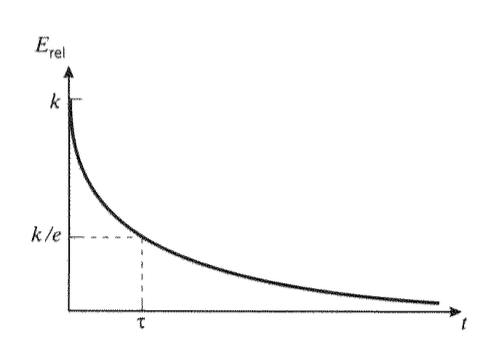
\[E_{rel} (t) = k \exp (-t/\tau) \nonumber \]
This important function is plotted schematically in Figure 11. The two adjustable parameters in the model, \(k\) and \(\tau\), can be used to force the model to match an experimental plot of the relaxation modulus at two points. The spring stiffness \(k\) would be set to the initial or glass modulus \(E_g\), and \(\tau\) would be chosen to force the value \(k/e\) to match the experimental data at \(t = \tau\).
The relaxation time \(\tau\) is strongly dependent on temperature and other factors that effect the mobility of the material, and is roughly inverse to the rate of molecular motion. Above \(T_g\), \(\tau\) is very short; below \(T_g\), it is very long. More detailed consideration of the temperature dependence will be given in a later section, in the context of "thermorheologically simple" materials.
In the case of the dynamic response, the time dependency of both the stress and the strain are of the form \(\exp (i \omega t)\). All time derivatives will therefore contain the expression \((i \omega) \exp (i \omega t)\), so Equation 5.4.22 gives:
\(k (i \omega) \epsilon_0^* \exp (i \omega t) = (i \omega + \dfrac{1}{\tau_j}) \sigma_0^* \exp (i \omega t)\)
The complex modulus \(E^*\) is then
\[E^* = \dfrac{\sigma_0^*}{\epsilon_0^*} = \dfrac{k(i\omega)}{i \omega + \tfrac{1}{\tau_j}} = \dfrac{k(i\omega \tau)}{1 + i \omega \tau} \nonumber \]
This equation can be manipulated algebraically (multiply and divide by the complex conjugate of the denominator) to yield:
\[E^* = \dfrac{k\omega^2 \tau^2}{1 + \omega^2 \tau^2} + i \dfrac{k \omega \tau}{1 + \omega^2 \tau^2} \nonumber \]
In Eq. 5.4.25, the real and imaginary components of the complex modulus are given explicitly; these are the "Debye" relations also important in circuit theory.
4.2 The Standard Linear Solid (Maxwell Form)
Most polymers do not exhibit the unrestricted flow permitted by the Maxwell model, although it might be a reasonable model for Silly Putty or warm tar. Therefore Equation 5.4.23 is valid only for a very limited set of materials. For more typical polymers whose conformational change is eventually limited by the network of entanglements or other types of junction points, more elaborate spring-dashpot models can be used effectively.
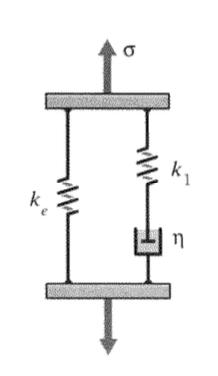
Placing a spring in parallel with the Maxwell unit gives a very useful model known as the "Standard Linear Solid" (S.L.S.) shown in Figure 12. This spring has stiffness \(k_e\), so named because it provides an "equilibrium" or rubbery stiffness that remains after the stresses in the Maxwell arm have relaxed away as the dashpot extends.
In this arrangement, the Maxwell arm and the parallel spring \(k_e\) experience the same strain, and the total stress \(\sigma\) is the sum of the stress in each arm: \(\sigma = \sigma_e + \sigma_m\). It is awkward to solve for the stress \(\sigma_m\) in the Maxwell arm using Equation 5.4.22, since that contains both the stress and its time derivative. The Laplace transformation is very convenient in this and other viscoelasticity problems, because it reduces differential equations to algebraic ones. Appendixes A lists some transform pairs encountered often in these problems.
Since the stress and strain are zero as the origin is approached from the left, the transforms of the time derivatives are just the Laplace variable s times the transforms of the functions; denoting the transformed functions with an overline, we have \(\mathcal{L} (\dot{\epsilon}) = s \bar{\epsilon}\) and \(\mathcal{L} (\dot{\sigma}) = s \bar{\sigma}\). Then writing the transform of an expression such as Equation 5.4.22 is done simply by placing a line over the time-dependent functions, and replacing the time-derivative overdot by an s coefficient:
\(k \dot{\epsilon} = \dot{\sigma_m} + \dfrac{1}{\tau} \sigma_m \to k_1 s \bar{\epsilon} = s \bar{\sigma_m} + \dfrac{1}{\tau} \bar{\sigma_m}\)
Solving for \(\bar{\sigma_{m}}\):
\[\bar{\sigma_m} = \dfrac{k_1 s}{s + \tfrac{1}{\tau}} \bar{\epsilon} \nonumber \]
Adding the stress \(\bar{\sigma_e} = k_e \bar{\epsilon}\) in the equilibrium spring, the total stress is:
\(\bar{\sigma} = k_e \bar{\epsilon} + \dfrac{k_1 s}{s + \tfrac{1}{\tau}} \bar{\epsilon} = \left \{ k_e + \dfrac{k_1 s}{s + \tfrac{1}{\tau}} \right \} \bar{\epsilon}\)
This result can be written
\[\bar{\sigma} = \mathcal{E} \bar{\epsilon} \nonumber \]
where for this model the parameter \(\mathcal{E}\) is
\[\mathcal{E} = k_e + \dfrac{k_1 s}{s + \tfrac{1}{\tau}} \nonumber \]
Equation 5.4.27, which is clearly reminiscent of Hooke’s Law \(\sigma = E_{\epsilon}\) but in the Laplace plane, is called the associated viscoelastic constitutive equation. Here the specific expression for \(\mathcal{E}\) is that of the Standard Linear Solid model, but other models could have been used as well.
For a given strain input function \(\epsilon (t)\), we obtain the resulting stress function in three steps:
1. Obtain an expression for the transform of the strain function, \(\bar{\epsilon} (s)\).
2. Form the algebraic product \(\bar{\sigma} (s) = \mathcal{E} \bar{\epsilon} (s)\).
3. Obtain the inverse transform of the result to yield the stress function in the time plane.
In the case of stress relaxation, the strain function \(\epsilon (t)\) is treated as a constant \(\epsilon_0\) times the "Heaviside" or "unit step" function \(u(t)\):
\(\epsilon (t) = \epsilon_0 u(t), \ \ \ \ u(t) = \begin{cases} 0, & t < 0\\ 1, & t \ge 0\end{cases}\)
This has the Laplace transform
\(\bar{\epsilon} = \dfrac{\epsilon_0}{s}\)
Using this in Equation 5.4.27 and dividing through by \(\epsilon_0\), we have
\(\dfrac{\bar{\sigma}}{\epsilon_0} = \dfrac{k_e}{s} + \dfrac{k_1}{s + \tfrac{1}{\tau}}\)
Since \(\mathcal{L}^{-1} 1/(s + a) = e^{-at}\), this can be inverted directly to give
\[\dfrac{\sigma (t)}{\epsilon_0} \equiv E_{rel} (t) = k_e + k_1 \exp (-t/\tau) \nonumber \]
This function, which is just that of the Maxwell model shifted upward by an amount \(k_e\), was used to generate the curve shown in Figure 6.
The form of Equation 5.4.27 is convenient when the stress needed to generate a given strain is desired. It is somewhat awkward when the strain generated by a given stress is desired, since then the parameter \(\mathcal{E}\) appears in the denominator:
\(\bar{\epsilon} = \dfrac{\bar{\sigma}}{\mathcal{E}} = \dfrac{\bar{\sigma}}{k_e + \dfrac{k_1 s}{s + \tfrac{1}{\tau}}}\)
This is more difficult to invert, and in such cases symbolic manipulation software such as Maple\(^{\text{TM}}\) can be helpful. For instance, if we want to compute the creep compliance of the Maxwell Standard Linear Solid, we could write:
read transformation library
> with(inttrans):
define governing equation
> eq1:=sigbar=EE*epsbar;
Constant stress sig0:
> sigbar:=laplace(sig0,t,s);
EE viscoelastic operator - Maxwell S.L.S. model
> EE:= k[e]+k[1]*s/(s+1/tau);
Solve governing equation for epsbar and invert:
> C[crp](t):=simplify((invlaplace(solve(eq1,epsbar),s,t))/sig0);
k[e] t
-k[e] - k[1] + k[1] exp(- -------------------)
tau (k[e] + k[1])
C[crp](t) := - -----------------------------------------------
k[e] (k[e] + k[1])
This result can be written as
\[C_{crp} (t) = C_g + (C_r - C_g) (1 - e^{-t/\tau_c}) \nonumber \]
where
\(C_g = \dfrac{1}{k_e + k_1}, \ \ C_r = \dfrac{1}{k_e}, \ \ \tau_c = \tau (\dfrac{k_e + k_1}{k_e})\)
The glassy compliance \(C_g\) is the compliance of the two springs \(k_e\) and \(k_1\) acting in parallel, and the rubbery compliance \(C_r\) is that of spring \(k_e\) alone, as expected. Less obvious is that the characteristic time for creep \(\tau_c\) (sometimes called the "retardation" time) is longer than the characteristic time for relaxation \(\tau\), by a factor equal to the ratio of the glassy to the rubbery modulus. This is a general result, not restricted to the particular model used.
A less awkward form for compliance problems is produced when "Voigt-type" rather than Maxwell-type models are used; see Exercise \(\PageIndex{7}\) and Exercise \(\PageIndex{8}\).
The Standard Linear Solid is a three-parameter model capable of describing the general features of viscoelastic relaxation: \(k_e\) and \(k_1\) are chosen to fit the glassy and rubbery moduli, and \(\tau\) is chosen to place the relaxation in the correct time interval:
\[k_e = E_r \nonumber \]
\[k_1 = E_g - E_r \nonumber \]
\[\tau = t @ E_{rel} = (E_r + \dfrac{1}{e} (E_g - E_r)) \nonumber \]
This forces the S.L.S. prediction to match the experimental data at three points, but the ability of the model to fit the experimental data over the full range of the relaxation is usually poor. The relaxation modulus predicted by the S.L.S. drops from \(E_g\) to \(E_r\) in approximately two decades(A "decade" of time in our context is a multiple of ten, say from 103 to 104 seconds, rather than a span of ten years.) of time, which is generally too abrupt a transition.
4.3 The Wiechert Model
A real polymer does not relax with a single relaxation time as predicted by the previous models. Molecular segments of varying length contribute to the relaxation, with the simpler and shorter segments relaxing much more quickly than the long ones. This leads to a distribution of relaxation times, which in turn produces a relaxation spread over a much longer time than can be modeled accurately with a single relaxation time. When the engineer considers it necessary to incorporate this effect, the Wiechert model illustrated in Figure 13 can have as many spring-dashpot Maxwell elements as are needed to approximate the distribution satisfactorily.
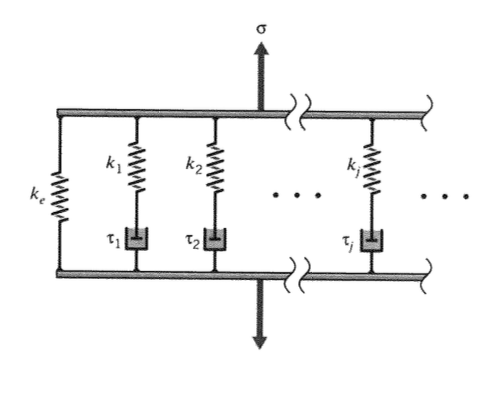
The total stress \(\sigma\) transmitted by the model is the stress in the isolated spring (of stiffness \(k_e\)) plus that in each of the Maxwell spring-dashpot arms:
\(\sigma = \sigma_e + \sum_j \sigma_j\)
From Equation 5.4.26, the stress in the Maxwell arm is
\(\overline{\sigma_j} = \dfrac{k_j s \bar{\epsilon}}{(s + \tfrac{1}{\tau_j})}\)
Then
\[\bar{\sigma} = \bar{\sigma}_e + \sum_j \bar{\sigma}_j = \left \{ k_e + \sum_j \dfrac{k_j s}{(s + \tfrac{1}{\tau_j})} \right \} \bar{\epsilon} \nonumber \]
The quantity in braces is the viscoelastic modulus operator \(\mathcal{E}\) defined in Equation 5.4.27 for the Wiechert model.
In stress relaxation tests, we have
\(\epsilon (t) = \epsilon_0 \Rightarrow \bar{\epsilon} (s) = \epsilon_0/s\)
\(\bar{\sigma} (s) = \mathcal{E} (s) \bar{\epsilon} (s) = \left \{ k_e + \sum_j \dfrac{k_j s}{s + \tfrac{1}{\tau_j}} \right\} \dfrac{\epsilon_0}{s} = \left \{ \dfrac{k_e}{s} + \sum_j \dfrac{k_j}{s + \tfrac{1}{\tau_j}}\right\} \epsilon_0\)
\[\sigma (t) = \mathcal{L}^{-1} [\bar{\sigma} (s)] = \left \{k_e + \sum_j k_j \exp (\dfrac{-t}{\tau_j}) \right \} \epsilon_0 \nonumber \]
Dividing by \(\epsilon_0\), the relaxation modulus is
\[E_{rel} (t) = k_e + \sum_j k_j \exp (\dfrac{-t}{\tau_j}) \nonumber \]
The material constants in this expression (\(k_e\) and the various \(k_j\) and \(\tau_j\)) can be selected by forcing the predicted values of Erel(t) as given by Equation 5.4.36 to match those determined experimentally. Exercise \(\PageIndex{19}\) provides an example of such a procedure.
Consider the stress function resulting from a constant-strain-rate test:
\(\epsilon = R_{\epsilon} t \to \bar{\epsilon} (s) = R_{\epsilon}/s^2\)
where \(R_{\epsilon}\) is the strain rate. Then
\(\bar{\sigma} = \mathcal{E} (s) \bar{\epsilon} (s) = \left [k_e + \sum_j \dfrac{k_j s}{s + \tfrac{1}{\tau_j}} \right ] \dfrac{R_{\epsilon}}{s^2} = \dfrac{k_e R_{\epsilon}}{s^2} + \sum_j \dfrac{k_j R_{\epsilon}}{s(s + \tfrac{1}{\tau_j})}\)
\[\sigma (t) = k_e R_{\epsilon} t + \sum_j k_j R_{\epsilon} \tau_j [1 - \exp (-t/\tau_j)] \nonumber \]
Note that the stress-time function, and hence the stress-strain curve, is not linear. It is not true, therefore, that a curved stress-strain diagram implies that the material response is nonlinear. It is also interesting to note that the slope of the constant-strain-rate stress-strain curve is related to the value of the relaxation modulus evaluated at the same time:
\(\dfrac{d \sigma}{d \epsilon} = \dfrac{d\sigma}{dt} \cdot \dfrac{dt}{d\epsilon} = \dfrac{d\sigma}{dt} \cdot \dfrac{1}{R_{\epsilon}} = \left [k_e R_{\epsilon} + \sum_j k_j R_{\epsilon} \exp (-t/\tau_j) \right ] \dfrac{1}{R_{\epsilon}}\)
\[= \left [ k_e + \sum_j k_j \exp (-t/\tau_j) \right ] \equiv E_{rel} (t) |_{t = \epsilon/R_{\epsilon}} \nonumber \]
It may be that the input strain function is not known as a mathematical expression, or its mathematical expression may be so complicated as to make the transform process intractable. In those cases, one may return to the differential constitutive equation and recast it in finite-difference form so as to obtain a numerical solution. Recall that the stress in the \(j\)th arm of the Wiechert model is given by
\[\dfrac{d \sigma_j}{dt} + \dfrac{1}{\tau_j} \sigma_j = k_j \dfrac{d\epsilon}{dt} \nonumber \]
This can be written in finite difference form as
\[\dfrac{\sigma_j^t - \sigma_j^{t - 1}}{\Delta t} + \dfrac{1}{\tau_j} \sigma_j^t = k_j \dfrac{\epsilon^t - \epsilon^{t - 1}}{\Delta t} \nonumber \]
where the superscripts \(t\) and \(t - l\) indicate values before and after the passage of a small time increment \(\Delta t\). Solving for \(\sigma_j^t\):
\[\sigma_j^t = \dfrac{1}{1 + (\Delta t/\tau_j)} [k_j (\epsilon^t - \epsilon^{t - 1}) + \sigma_j^{t - 1}] \nonumber \]
Now summing over all arms of the model and adding the stress in the equilibrium spring:
\[\sigma^t = k_e \epsilon^t + \sum_j \dfrac{k_j (\epsilon^t - \epsilon^{t - 1}) + \sigma_j^{t - 1}}{1 + (\Delta t/\tau_j)} \nonumber \]
This constitutes a recursive algorithm which the computer can use to calculate successive values of \(\sigma^t\) beginning at \(t = 0\). In addition to storing the various \(k_j\) and \(\tau_j\) which constitute the material description, the computer must also keep the previous values of each arm stress (the \(\sigma_j^{t-1}\)) in storage.
4.4 The Boltzman Superposition Integral
As seen in the previous sections, linear viscoelasticity can be stated in terms of mechanical models constructed from linear springs and dashpots. These models generate constitutive relations that are ordinary differential equations; see Exercise \(\PageIndex{13}\) and Exercise \(\PageIndex{14}\) as examples of this. However, integral equations could be used as well, and this integral approach is also used as a starting point for viscoelastic theory.
Integrals are summing operations, and this view of viscoelasticity takes the response of the material at time t to be the sum of the responses to excitations imposed at all previous times. The ability to sum these individual responses requires the material to obey a more general statement of linearity than we have invoked previously, specifically that the response to a number of individual excitations be the sum of the responses that would have been generated by each excitation acting alone. Mathematically, if the stress due to a strain \(\epsilon_1 (t)\) is \(\sigma (\epsilon_1)\) and that due to a different strain \(\epsilon_2 (t)\) is \(\sigma (\epsilon_2)\), then the stress due to both strains is \(\sigma (\epsilon_1 + \epsilon_2) = \sigma (\epsilon_1) + \sigma (\epsilon_2)\). Combining this with the condition for multiplicative scaling used earlier, we have as a general statement of linear viscoelasticity:
\[\sigma (a \epsilon_1 + b \epsilon_2) = a \sigma (\epsilon_1) + b\sigma (\epsilon_2) \nonumber \]
The "Boltzman Superposition Integral" statement of linear viscoelastic response follows from this definition. Consider the stress \(\sigma_1 (t)\) at time \(t\) due to the application of a small strain \(\Delta_{\epsilon_1}\) applied at a time \(\xi_1\) previous to \(t\); this is given directly from the definition of the relaxation modulus as
Similarly, the stress \(\sigma_2 (t)\) due to a strain increment \(\Delta_{\epsilon_2}\) applied at a different time \(\xi_2\) is
If the material is linear, the total stress at time \(t\) due to both strain increments together can be obtained by superposition of these two individual effects:
As the number of applied strain increments increases so as to approach a continuous distribution, this becomes:
\[\to \sigma(t) = \int_{-\infty}^{t} E_{rel} (t - \xi)d\epsilon =\int_{-\infty}^{t} E_{rel} (t - \xi) \dfrac{d\epsilon (\mathcal{E})}{d\mathcal{E}} d\mathcal{E} \nonumber \]
In the case of constant strain rate \((\epsilon (t) = R_{\epsilon} t)\) we have
\(\dfrac{d\epsilon (\xi)}{d\xi} = \dfrac{d(R_{\epsilon} \xi)}{d\xi} = R_{\epsilon}\)
For S.L.S. materials response \((E_{rel} (t) = k_e + k_1 \exp [-t/\tau])\),
Equation 5.4.44 gives the stress as
Maple statements for carrying out these operations might be:
define relaxation modulus for S.L.S. >Erel:=k[e]+k[1]*exp(-t/tau); define strain rate >eps:=R*t; integrand for Boltzman integral >integrand:=subs(t=t-xi,Erel)*diff(subs(t=xi,eps),xi); carry out integration >’sigma(t)’=int(integrand,xi=0..t);
which gives the result:
This is identical to Equation 5.4.37, with one arm in the model.
The Boltzman integral relation can be obtained formally by recalling that the transformed relaxation modulus is related simply to the associated viscoelastic modulus in the Laplace plane as
stress relaxation: \(\epsilon (t) = \epsilon_0 u(t) \to \bar{\epsilon = \dfrac{\epsilon_0}{s}\)
\(\bar{\sigma} = \mathcal{E} \bar{\epsilon} = \mathcal{E} \dfrac{\epsilon_0}{s}\)
\(\dfrac{\bar{\sigma}}{\epsilon_0} = \bar{E}_{rel} (s) = \dfrac{1}{s} \mathcal{E} (s)\)
Since \(s\bar{f} = \bar{\dot{f}}\), the following relations hold:
\(\bar{\sigma} = \mathcal{E} \bar{\epsilon} = s \bar{E}_{rel} \bar{\epsilon} = \bar{\dot{E}}_{rel} \bar{\epsilon} = \bar{E}_{rel} \bar{\dot{\epsilon}}\)
The last two of the above are of the form for which the convolution integral transform applies (see Appendix A), so the following four equivalent relations are obtained immediately:
\[\begin{array} {rcl} {\sigma (t)} & = & {\int_0^t E_{rel} (t - \xi) \dot{\epsilon} (\xi) d \xi} \\ {} & = & {\int_0^t E_{rel} (\xi) \dot{\epsilon} (t - \xi) d \xi} \\ {} & = & {\int_0^t \dot{E}_{rel} (t - \xi) \epsilon (\xi) d \xi} \\ {} & = & {\int_0^t \dot{E}_{rel} (\xi) \epsilon (t - \xi) d \xi} \end{array} \nonumber \]
These relations are forms of Duhamel’s formula, where \(E_{rel}(t)\) can be interpreted as the stress \(\sigma (t)\) resulting from a unit input of strain. If stress rather than strain is the input quantity, then an analogous development leads to
\[\epsilon (t) = \int_0^t C_{crp} (t - \xi) \dot{sigma} (\xi) d \xi \nonumber \]
where \(C_{crp} (t)\), the strain response to a unit stress input, is the quantity defined earlier as the creep compliance. The relation between the creep compliance and the relaxation modulus can now be developed as:
\(\bar{\sigma} = s \bar{E}_{rel} \bar{\epsilon}\)
\(\bar{\epsilon} = s \bar{C}_{crp} \bar{\sigma}\)
\(\bar{\sigma} \bar{\epsilon} = s^2 \bar{E}_{rel} \bar{C}_{crp} \bar{\epsilon} \bar{\sigma} \to \bar{E}_{rel} \bar{C}_{crp} = \dfrac{1}{s^2}\)
It is seen that one must solve an integral equation to obtain a creep function from a relaxation function, or vice versa. This deconvolution process may sometimes be performed analytically (probably using Laplace transforms), and in intractable cases some use has been made of nu- merical approaches.
4.5 Effect of Temperature
As mentioned at the outset (\(cf\). Equation 5.4.2), temperature has a dramatic influence on rates of vis- coelastic response, and in practical work it is often necessary to adjust a viscoelastic analysis for varying temperature. This strong dependence of temperature can also be useful in experimental characterization: if for instance a viscoelastic transition occurs too quickly at room temperature for easy measurement, the experimenter can lower the temperature to slow things down.
In some polymers, especially "simple" materials such as polyisobutylene and other amorphous thermoplastics that have few complicating features in their microstructure, the relation between time and temperature can be described by correspondingly simple models. Such mate- rials are termed "thermorheologically simple".
For such simple materials, the effect of lowering the temperature is simply to shift the viscoelastic response (plotted against log time) to the right without change in shape. This is equivalent to increasing the relaxation time \(\tau\), for instance in Eqns. 5.4.29 or 5.4.30, without changing the glassy or rubbery moduli or compliances. A "time-temperature shift factor" \(a_T (T)\) can be defined as the horizontal shift that must be applied to a response curve, say \(C_{crp} (t)\), measured at an arbitrary temperature \(T\) in order to move it to the curve measured at some reference temperature \(T_{ref}\).
\[\log (a_T) = \log \tau (T) - \log \tau (T_{ref}) \nonumber \]
This shifting is shown schematically in Figure 14.
Figure 14: The time-temperature shifting factor.
In the above we assume a single relaxation time. If the model contains multiple relaxation times, thermorheological simplicity demands that all have the same shift factor, since otherwise the response curve would change shape as well as position as the temperature is varied.
If the relaxation time obeys an Arrhenius relation of the form \(\tau (T) = \tau_0 \exp (E^{\dagger}/RT)\), the shift factor is easily shown to be (see Exercise \(\PageIndex{17}\))
\[\log a_T = \dfrac{E^{\dagger}}{2.303 R} (\dfrac{1}{T} - \dfrac{1}{T_{ref}}) \nonumber \]
Here the factor \(2.303 = \ln 10\) is the conversion between natural and base 10 logarithms, which are commonly used to facilitate graphical plotting using log paper.
While the Arrhenius kinetic treatment is usually applicable to secondary polymer transitions, many workers feel the glass-rubber primary transition appears governed by other principles. A popular alternative is to use the "W.L.F." equation at temperatures near or above the glass temperature:
\[\log a_T = \dfrac{-C_1 (T- T_{ref}}{C_2 + (T - T_{ref})} \nonumber \]
Here \(C_1\) and \(C_2\) are arbitrary material constants whose values depend on the material and choice of reference temperature \(T_{ref}\). It has been found that if \(T_{ref}\) is chosen to be \(T_g\), then \(C_1\) and \(C_2\) often assume "universal" values applicable to a wide range of polymers:
\[\log a_T = \dfrac{-17.4 (T - T_g)}{51.6 + (T- T_g)} \nonumber \]
where \(T\) is in Celsius. The original W.L.F. paper(M.L. Williams, R.F. Landel, and J.D. Ferry, J. Am. Chem. Soc., Vol. 77, No. 14, pp. 3701–3707, 1955.) developed this relation empirically, but rationalized it in terms of free-volume concepts.
A series of creep or relaxation data taken over a range of temperatures can be converted to a single "master curve" via this horizontal shifting. A particular curve is chosen as reference, then the other curves shifted horizontally to obtain a single curve spanning a wide range of log time as shown in Figure 15. Curves representing data obtained at temperatures lower than the reference temperature appear at longer times, to the right of the reference curve, so will have to shift left; this is a positive shift as we have defined the shift factor in Equation 5.4.47. Each curve produces its own value of \(a_T\), so that \(a_T\) becomes a tabulated function of temperature. The master curve is valid only at the reference temperature, but it can be used at other temperatures by shifting it by the appropriate value of log \(a_T\).
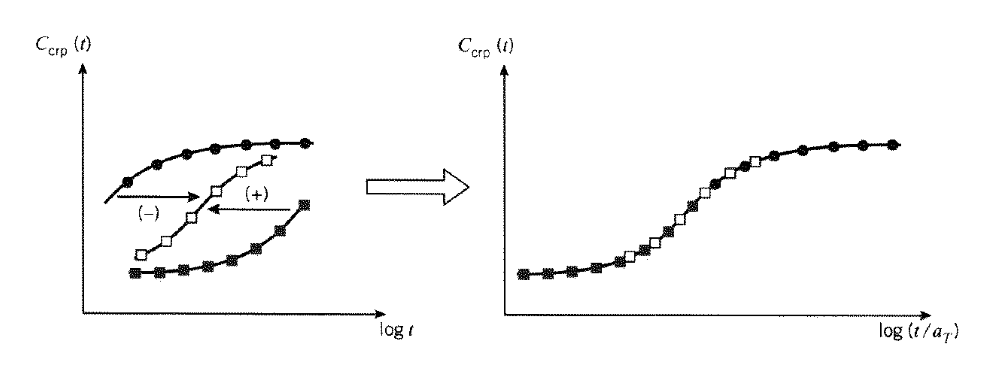
The labeling of the abscissa as \(\log(t/a_T) = \log t - \log a_t\) in Figure 15 merits some discussion. Rather than shifting the master curve to the right for temperatures less than the reference temperature, or to the left for higher temperatures, it is easier simply to renumber the axis, increasing the numbers for low temperatures and decreasing them for high. The label therefore indicates that the numerical values on the horizontal axis have been adjusted for temperature by subtracting the log of the shift factor. Since lower temperatures have positive shift factors, the numbers are smaller than they need to be and have to be increased by the appropriate shift factor. Labeling axes this way is admittedly ambiguous and tends to be confusing, but the correct adjustment is easily made by remembering that lower temperatures slow the creep rate, so times have to be made longer by increasing the numbers on the axis. Conversely for higher temperatures, the numbers must be made smaller.
We wish to find the extent of creep in a two-temperature cycle that consists of \(t_1 = 10\) hours at 20 \(^{\circ}C\) followed by \(t_2 = 5\) minutes at 50 \(^{\circ}C\). The log shift factor for 50 \(^{\circ}C\), relative to a reference temperature of 20 \(^{\circ}C\), is known to be -2.2.
Using the given shift factor, we can adjust the time of the second temperature at 50 \(^{\circ}C\) to an equivalent time \(t_2'\) at 20 \(^{\circ}C\) as follows:
\(t_2' = \dfrac{t_2}{a_T} = \dfrac{\text{5 min}}{10^{-2.2}} = 792 \text{ min} = 13.2 \text{ h}\)
Hence 5 minutes at 50 \(^{\circ}C\) is equivalent to over 13 h at 20 \(^{\circ}C\). The total effective time is then the sum of the two temperature steps:
\(t' = t_1 + t_2' = 10 + 13.2 = 23.2 \text{ h}\)
The total creep can now be evaluated by using this effective time in a suitable relation for creep, for instance Equation 5.4.30.
The effective-time approach to response at varying temperatures can be extended to an arbitrary number of temperature steps:
\(t' = \sum_j t_j' = \sum_j (\dfrac{t_j}{a_T (T_j)})\)
For time-dependent temperatures in general, we have \(T = T(t)\), so \(a_T\) becomes an implicit function of time. The effective time can be written for continuous functions as
\[t' = \int_0^t \dfrac{d\xi}{a_T (\xi)} \nonumber \]
where \(\xi\) is a dummy time variable. This approach, while perhaps seeming a bit abstract, is of considerable use in modeling time-dependent materials response. Factors such as damage due to applied stress or environmental exposure can accelerate or retard the rate of a given response, and this change in rate can be described by a time-expansion factor similar to aT but dependent on other factors in addition to temperature.
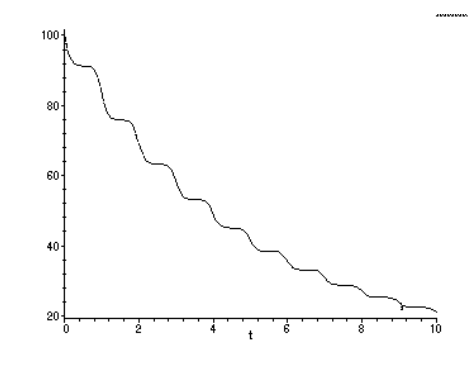
Consider a hypothetical polymer with a relaxation time measured at 20 \(^{\circ}C\) of \(\tau\) = 10 days, and with glassy and rubbery moduli \(E_g = 100\), \(E_r = 10\). The polymer can be taken to obey the W.L.F. equation to a reasonable accuracy, with \(T_g\) = 0 \(^{\circ}C\). We wish to compute the relaxation modulus in the case of a temperature that varies sinusoidally \(\pm\)5 \(^{\circ}\) around 20 \(^{\circ}C\) over the course of a day. This can be accomplished by using the effective time as computed from Equation 5.4.51 in Equation 5.4.29, as shown in the following Maple commands:
define WLF form of log shift factor >log_aT:=-17.4*(T-Tg)/(51.6+(T-Tg)); find offset; want shift at 20C to be zero >Digits:=4;Tg:=0;offset:=evalf(subs(T=20,log_aT)); add offset to WLF >log_aT:=log_aT-offset; define temperature function >T:=20+5*cos(2*Pi*t); get shift factor; take antilog >aT:=10^log_aT; replace time with dummy time variable xi >aT:=subs(t=xi,aT); get effective time t’ >t_prime:=int(1/aT,xi=0..t); define relaxation modulus >Erel:=ke+k1*exp(-t_prime/tau); define numerical parameters >ke:=10;k1:=90;tau:=10; plot result >plot(Erel,t=0..10);
5 Viscoelastic Stress Analysis
5.1 Multiaxial Stress States
The viscoelastic expressions above have been referenced to a simple stress state in which a specimen is subjected to uniaxial tension. This loading is germane to laboratory characterization tests, but the information obtained from these tests must be cast in a form that allows application to the multiaxial stress states that are encountered in actual design.
Many formulae for stress and displacement in structural mechanics problems are cast in forms containing the Young’s modulus \(E\) and the Poisson's ratio \(ν\). To adapt these relations for viscoelastic response, one might observe both longitudinal and transverse response in a tensile test, so that both \(E(t)\) and \(ν(t)\) could be determined. Models could then be fit to both deformation modes to find the corresponding viscoelastic operators \(\mathcal{E}\) and \(\mathcal{N}\). However, it is often more convenient to use the shear modulus \(G\) and the bulk modulus \(K\) rather than \(E\) and \(ν\), which can be done using the relations valid for isotropic linear elastic materials:
\[E= \dfrac{9GK}{3K + G} \nonumber \]
\[v =\dfrac{3K - 2G}{6K + 2G} \nonumber \]
These important relations follow from geometrical or equilibrium arguments, and do not involve considerations of time-dependent response. Since the Laplace transformation affects time and not spatial parameters, the corresponding viscoelastic operators obey analogous relations in the Laplace plane:
\(\mathcal{E} (s) = \dfrac{9\mathcal{G}(s) \mathcal{K}(s)}{3\mathcal{K}(s) + \mathcal{G}(s)}\)
Figure 17: Relaxation moduli of polyisobutylene in dilation (\(K\)) and shear (\(G\)). From Huang, M.G., Lee, E.H., and Rogers, T.G., "On the Influence of Viscoelastic Compressibility in Stress Analysis," Stanford University Technical Report No. 140 (1963).
These substitutions are useful because \(K(t)\) is usually much larger than \(G(t)\), and \(K(t)\) usually experiences much smaller relaxations than \(G(t)\) (see Figure 17). These observations lead to idealizations of compressiblilty that greatly simplify analysis. First, if one takes \(K_{rel} = K_e\) to be finite but constant (only shear response viscoelastic), then
\(\mathcal{K} = s \bar{K}_{rel} = s \dfrac{K_e}{s} = K_e\)
Secondly, if \(K\) is assumed not only constant but infinite (material incompressible, no hydrostatic deformation), then
\(\mathcal{G} = \dfrac{\mathcal{E}}{3}\)
\(\mathcal{N} = v = \dfrac{1}{2}\)
The shear modulus of polyvinyl chloride (PVC) is observed to relax from a glassy value of \(G_g = 800\) MPa to a rubbery value of \(G_r =1.67\) MPa. The relaxation time at 75 \(^{\circ} C\) is approximately \(\tau =100\) s, although the transition is much broader than would be predicted by a single relaxation time model. But assuming a standard linear solid model as an approximation, the shear operator is
The bulk modulus is constant to a good approximation at \(K_e =1.33\) GPa. These data can be used to predict the time dependence of the Poisson’s ratio, using the expression
On substituting the numerical values and simplifying, this becomes
\(\mathcal{N} = 0.25 + \dfrac{9.97 \times 10^8}{4.79 \times 10^{11} s + 3.99 \times 10^9}\)
The "relaxation" Poisson’s ratio -- the time-dependent strain in one direction induced by a constant strain in a transverse direction -- is then
\(\bar{v}_{rel} = \dfrac{\mathcal{N}}{s} = \dfrac{0.25}{s} + \dfrac{1}{s} (\dfrac{9.97 \times 10^8}{4.79 \times 10^{11} s + 3.99 \times 10^9})\)
Inverting, this gives
This function is plotted in Figure 18. The Poisson’s ratio is seen to rise from a glassy value of 0.25 to a rubbery value of 0.5 as the material moves from the glassy to the rubbery regime over time. Note that the time constant of 120 s in the above expression is not the same as the relaxation time \(\tau\) for the pure shear response.
Figure 18: Time dependence of Poisson’s ratio for PVC at 75 \(^{\circ} C\), assuming viscoelastic shear response and elastic hydrostatic response.
In the case of material isotropy (properties not dependent on direction of measurement), at most two viscoelastic operators -- say \(\mathcal{G}\) and \(\mathcal{K}\) -- will be necessary for a full characterization of the material. For materials exhibiting lower orders of symmetry more descriptors will be necessary: a transversely isotropic material requires four constitutive descriptors, an orthotropic material requires nine, and a triclinic material twenty-one. If the material is both viscoelastic and anisotropic, these are the number of viscoelastic operators that will be required. Clearly, the analyst must be discerning in finding the proper balance between realism and practicality in choosing models.
5.2 Superposition
Fortunately, it is often unnecessary to start from scratch in solving structural mechanics problems that involve viscoelastic materials. We will outline two convenient methods for adapting standard solutions for linear elastic materials to the viscoelastic case, and the first of these is based on the Boltzman superposition principle. We will illustrate this with a specific example, that of the thin-walled pressure vessel.
Polymers such as polybutylene and polyvinyl chloride are finding increasing use in plumbing and other liquid delivery systems, and these materials exhibit measurable viscoelastic time dependency in their mechanical response. It is common to ignore these rate effects in design of simple systems by using generous safety factors. However, in more critical situations the designer may wish extend the elastic theory outlined in standard texts to include material viscoelasticity.
One important point to stress at the outset is that in many cases, the stress distribution does not depend on the material properties and consequently is not influenced by viscoelasticity. For instance, the "hoop" stress \(\sigma_{\theta}\) in an open-ended cylindrical pressure vessel is
\(\sigma_{\theta} = \dfrac{pr}{b}\)
where \(p\) is the internal pressure, \(r\) is the vessel radius, and \(b\) is the wall thickness. If the material happens to be viscoelastic, this relation -- which contains no material constants -- applies without change.
However, the displacements -- for instance the increase in radius \(\delta_r\) -- are affected, increasing with time as the strain in the material increases via molecular conformational change. For an open-ended cylindrical vessel with linear elastic material, the radial expansion is
\(\delta_r = \dfrac{pr^2}{bE}\)
The elastic modulus in the denominator indicates that the radial expansion will increase as material loses stiffness through viscoelastic response. In quantifying this behavior, it is convenient to replace the modulus \(E\) by the compliance \(C = 1/E\). The expression for radial expansion now has the material constant in the numerator:
\[\delta_r = \dfrac{pr^2}{b} C \nonumber \]
If the pressure \(p\) is constant, viscoelasticity enters the problem only through the material compliance \(C\), which must be made a suitable time-dependent function. (Here we assume that values of \(r\) and \(b\) can be treated as constant, which will be usually be valid to a good approximation.) The value of \(\delta_r\) at time \(t\) is then simply the factor \((pr^2/b)\) times the value of \(C(t)\) at that time.
The function \(C(t)\) needed here is the material’s creep compliance, the time-dependent strain exhibited by the material in response to an imposed unit tensile stress: \(C_{crp} = \epsilon (t)/\sigma_0\). The standard linear solid, as given by Equation 5.4.30, gives the compliance as
\[C_{crp} (t) = C_g + (C_r - C_g) (1 - e^{-t/\tau}) \nonumber \]
where here it is assumed that the stress is applied at time \(t = 0\). The radial expansion of a pressure vessel, subjected to a constant internal pressure \(p_0\) and constructed of a material for which the S.L.S. is a reasonable model, is then
\[\delta_r (t) = \dfrac{p_0 r^2}{b} [C_g + (C_r - C_g) (1 - e^{-t/\tau}] \nonumber \]
This function is shown schematically in Figure 19.
The situation is a bit more complicated if both the internal pressure and the material compliance are time-dependent. It is incorrect simply to use the above equation with the value of \(p_0\) replaced by the value of \(p(t)\) at an arbitrary time, because the radial expansion at time \(t\) is influenced by the pressure at previous times as well as the pressure at the current time.
The correct procedure is to "fold" the pressure and compliance functions together in a convolution integral as was done in developing the Boltzman Superposition Principle. This gives:
\[\delta_r (t) = \dfrac{r^2}{b} \int_{-\infty}^t C_{crp} (t - \xi) \dot{p} (\xi) d\xi \nonumber \]
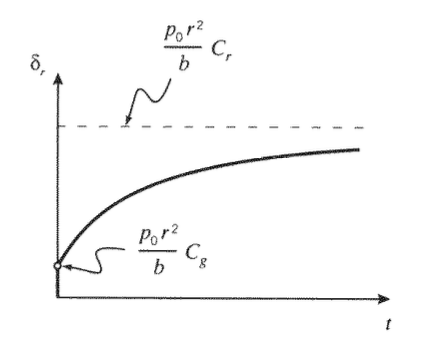
Let the internal pressure be a constantly increasing "ramp" function, so that \(p = R_pt\), with \(R_p\) being the rate of increase; then we have \(\dot{p} (\xi) = R_p\). Using the standard linear solid of Equation 5.4.55 for the creep compliance, the stress is calculated from the convolution integral as
This function is plotted in Figure 20, for a hypothetical material with parameters \(C_g = 1/3 \times 10^5 \text{ psi}^{-1}\), \(C_r = 1/3 \times 10^4 \text{ psi}^{-1}\), \(b = 0.2\ in\), \(r = 2 \ in\), \(\tau = 1\) month, and \(R_p = 100\) psi/month. Note that the creep rate increases from an initial value \((r^2/b)R_pC_g\) to a final value \((r^2/b)R_pC_r\) as the glassy elastic components relax away.
Figure 20: Creep \(\delta_r(t)\) of hypothetical pressure vessel for constantly increasing internal pressure.
When the pressure vessel has closed ends and must therefore resist axial as well as hoop stresses, the radial expansion is \(\delta_r = (pr^2/bE) [1 − (ν/2)]\). The extension of this relation to viscoelastic material response and a time-dependent pressure is another step up in complexity. Now two material descriptors, \(E\) and \(ν\), must be modeled by suitable time-dependent functions, and then folded into the pressure function. The superposition approach described above could be used here as well, but with more algebraic complexity. The "viscoelastic correspondence principle" to be presented in below is often more straightforward, but the superposition concept is very important in understanding time-dependent materials response.
5.3 The viscoelastic correspondence principle
In elastic materials, the boundary tractions and displacements may depend on time as well as position without affecting the solution: time is carried only as a parameter, since no time derivatives appear in the governing equations. With viscoelastic materials, the constitutive or stress-strain equation is replaced by a time-differential equation, which complicates the subsequent solution. In many cases, however, the field equations possess certain mathematical properties that permit a solution to be obtained relatively easily(E.H. Lee, "Viscoelasticity," Handbook of Engineering Mechanics, W. Flugge, ed., McGraw-Hill, New York, 1962, Chap. 53.). The "viscoelastic correspondence principle" to be outlined here works by adapting a previously available elastic solution to make it applicable to viscoelastic materials as well, so that a new solution from scratch is unnecessary.
If a mechanics problem -- the structure, its materials, and its boundary conditions of traction and displacement -- is subjected to the Laplace transformation, it will often be the case that none of the spatial aspects of its description will be altered: the problem will appear the same, at least spatially. Only the time-dependent aspects, namely the material properties, will be altered. The Laplace-plane version of problem can then be interpreted as representing a stress analysis problem for an elastic body of the same shape as the viscoelastic body, so that a solution for an elastic body will apply to a corresponding viscoelastic body as well, but in the Laplace plane.
There is an exception to this correspondence, however: although the physical shape of the body is unchanged upon passing to the Laplace plane, the boundary conditions for traction or displacement may be altered spatially on transformation. For instance, if the imposed traction is \(\hat{T} = \cos (xt)\), then \(\bar{\hat{T}} = s/(s^2 + x^2)\); this is obviously of a different spatial form than the original
untransformed function. However, functions that can be written as separable space and time factors will not change spatially on transformation:
\(\hat{T} (x, t) = f(x) g(t) \Rightarrow \bar{\hat{T}} = f(x) \bar{g}(s)\)
This means that the stress analysis problems whose boundary constraints are independent of time or at worst are separable functions of space and time will look the same in both the actual and Laplace planes. In the Laplace plane, the problem is then geometrically identical with an "associated" elastic problem.
Having reduced the viscoelastic problem to an associated elastic one by taking transforms, the vast library of elastic solutions may be used: one looks up the solution to the associated elastic problem, and then performs a Laplace inversion to return to the time plane. The process of viscoelastic stress analysis employing transform methods is usually called the "correspondence principle", which can be stated as the following recipe:
1. Determine the nature of the associated elastic problem. If the spatial distribution of the boundary and body-force conditions is unchanged on transformation - a common occurrence - then the associated elastic problem appears exactly like the original viscoelastic one.
2. Determine the solution to this associated elastic problem. This can often be done by reference to standard handbooks(For instance, W.C. Young, Roark’s Formulas for Stress and Strain, McGraw-Hill, Inc., New York, 1989.) or texts on the theory of elasticity(For instance, S. Timoshenko and J.N. Goodier, Theory of Elasticity, McGraw-Hill, Inc., New York, 1951.).
3. Recast the elastic constants appearing in the elastic solution in terms of suitable viscoelastic operators. As discussed in Section 5.1, it is often convenient to replace \(E\) and \(ν\) with \(G\) and \(K\), and then replace the \(G\) and \(K\) by their viscoelastic analogs:
\(\left \{ \begin{array} {c} E \\ v \end{array} \right \} \to \begin{cases} G \to \mathcal{G} \\ K \to \mathcal{K} \end{cases}\)
- Replace the applied boundary and body force constraints by their transformed counterparts:
\(\hat{T} \Rightarrow \bar{\hat{T}}\)
\(\hat{u} \Rightarrow \bar{\hat{u}}\)
where \(\hat{T}\) and \(\hat{u}\) are imposed tractions and displacements, respectively.
5. Invert the expression so obtained to obtain the solution to the viscoelastic problem in the time plane.
If the elastic solution contains just two time-dependent quantities in the numerator, such as in Equation 5.4.54, the correspondence principle is equivalent to the superposition method of the previous section. Using the pressure-vessel example, the correspondence method gives
\(\delta_r = \dfrac{pr^2 C}{b} \to \bar{\delta}_r (s) = \dfrac{r^2}{b} \bar{p} \mathcal{C}\)
Since \(\mathcal{C} = s \bar{C}_{crp}\), the transform relation for convolution integrals gives
as before. However, the correspondence principle is more straightforward in problems having a complicated mix of time-dependent functions, as demonstrated in the following example.
Example \(\PageIndex{14}\)
The elastic solution for the radial expansion of a closed-end cylindrical pressure vessel of radius \(r\) and thickness \(b\) is
Following the correspondence-principle recipe, the associated solution in the Laplace plane is
In terms of hydrostatic and shear response functions, the viscoelastic operators are:
\(\mathcal{E} (s) = \dfrac{9\mathcal{G} (s) \mathcal{K} (s)}{3 \mathcal{K} (s) + \mathcal{G} (s)}\)
In Example \(\PageIndex{12}\), we considered a PVC material at 75 \(^{\circ}C\) that to a good approximation was elastic in hydrostatic response and viscoelastic in shear. Using the standard linear solid model, we had
\(\mathcal{K} = K_e, \ \ \ \mathcal{G} = G_r + \dfrac{(G_g - G_r)s}{s + \tfrac{1}{\tau}}\)
where \(K_e =1.33\) GPa, \(G_g =800\) MPA, \(G_r =1.67\) MPa, and \(\tau =100\) s.
For constant internal pressure \(p(t) = p_0\), \(\bar{p} = p_0/s\). All these expressions must be combined, and the result inverted. Maple commands for this problem might be:
define shear operator > G:=Gr+((Gg-Gr)*s)/(s+(1/tau)); define Poisson operator > N:=(3*K-2*G)/(6*K+2*G); define modulus operator > Eop:=(9*G*K)/(3*K+G); define pressure operator > pbar:=p0/s; get d1, radial displacement (in Laplace plane) > d1:=(pbar*r^2)*(1-(N/2))/(b*Eop); read Maple library for Laplace transforms > readlib(inttrans); invert transform to get d2, radial displacement in real plane > d2:=invlaplace(d1,s,t);
After some manual rearrangement, the radial displacement \(\delta_r(t)\) can be written in the form
where the creep retardation time is \(\tau_c = \tau (G_g/G_r)\). Continuing the Maple session:
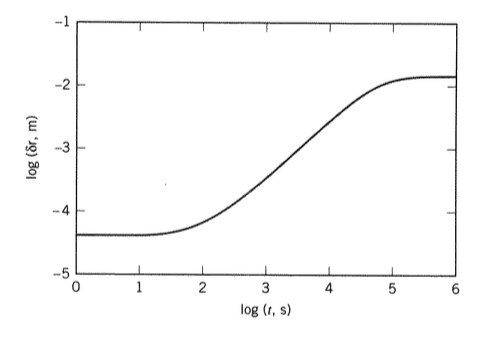
define numerical parameters > Gg:=800*10^6; Gr:=1.67*10^6; tau:=100; K:=1.33*10^9; > r:=.05; b:=.005; p0:=2*10^5; resulting expression for radial displacement > d2; - .01494 exp( - .00002088 t) + .01498
A log-log plot of this function is shown in Figure 21. Note that for this problem the effect of the small change in Poisson's ratio \(ν\) during the transition is negligible in comparison with the very large change in the modulus \(E\), so that a nearly identical result would have been obtained simply by letting \(ν\) = constant = 0.5. On the other hand, it isn’t appreciably more difficult to include the time dependence of \(ν\) if symbolic manipulation software is available.
6. Additional References
- Aklonis, J.J., MacKnight, W.J., and Shen, M., Introduction to Polymer Viscoelasticity, Wiley-Interscience, New York, 1972.
- Christensen, R.M., Theory of Viscoelasticity, 2nd ed., Academic Press, New York, 1982.
- Ferry, J.D., Viscoelastic Properties of Polymers, 3rd ed., Wiley & Sons, New York, 1980.
- Flugge, W., Viscoelasticity, Springer-Verlag, New York, 1975.
- McCrum, N.G, Read, B.E., and Williams, G., Anelastic and Dielectric in Polymeric Solids, Wiley & Sons, London, 1967. Available from Dover Publications, New York.
- Tschoegl, N.W., The Phenomenological Theory of Linear Viscoelastic Behavior, Springer- Verlag, Heidelberg, 1989.
- Tschoegl, N.W., "Time Dependence in Materials Properties: An Overview," Mechanics of Time-Dependent Materials, Vol. 1, pp. 3–31, 1997.
- Williams, M.L., "Structural Analysis of Viscoelastic Materials," AIAA Journal, p. 785, May 1964.
Plot the functions \(e^{-t/\tau}\) and \(1 - e^{t/\tau}\) versus \(\log_10 t\) from \(t = 10^{-2}\) to \(t= 10^2\). Have two curves on the plot for each function, one for \(\tau = 1\) and one for \(\tau = 10\).
Determine the apparent activation energy in (\(E^{\dagger}\) in Equation 5.4.2) for a viscoelastic relaxation in which the initial rate is observed to double when the temperature is increased from 20 \(^{\circ} C\) to 30 \(^{\circ} C\). (Answer: \(E^{\dagger} = 51\ kJ/mol\).)
Determine the crosslink density \(N\) and segment molecular weight \(M_c\) between crosslinks for a rubber with an initial modulus \(E = 1000\) psi at \(20^{\circ}C\) and density \(1.1 \ g/cm^3\). (Answer: \(N = 944\ mol/m^3, M_c = 1165\ g/mol\).)
Expand the exponential forms for the dynamic stress and strain (\(\sigma (t) = \sigma_0^* e^{i\omega t}, \epsilon (t) =\epsilon_0^* e^{i\omega t}\)) and show that
\(E^* = \dfrac{\sigma(t)}{\epsilon (t)} = \dfrac{\sigma_0 \cos \delta}{\epsilon_0} + i\dfrac{\sigma_0 \sin \delta}{\epsilon_0}\),
where \(\delta\) is the phase angle between the stress and strain.
Using the relation \(\bar{\sigma} = \mathcal{E} \bar{\epsilon}\) for the case of dynamic loading (\(\epsilon (t) = \epsilon_0 \cos \omega t\)) and S.L.S. material response \(\left(\mathcal{E} = k_e + k_1s/(s + \tfrac{1}{\tau})\right)\), solve for the time-dependent stress \(\sigma (t)\). Use this solution to identify the steady-state components of the complex modulus \(E^* = E' + iE''\), and the transient component as well. Answer:
Exercise \(\PageIndex{6}\)
For the Standard Linear Solid with parameters \(k_e = 25\), \(k_1 = 50\), and \(\tau_1 = 1\), plot \(E'\) and \(E''\) versus \(\log \omega\) in the range \(10^{-2} < \omega \tau_1 < 10^2\). Also plot \(E''\) versus \(E'\) in this same range, using ordinary rather than logarithmic axes and the same scale for both axes (Argand diagram).
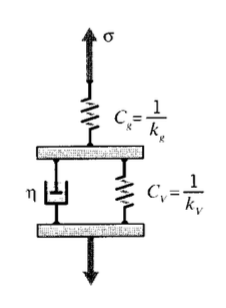
Show that the viscoelastic law for the "Voigt" form of the Standard Linear Solid (a spring of stiffness \(k_v = 1/C_v\) in parallel with a dashpot of viscosity \(eta\), and this combination in series with another spring of stiffness \(k_g = 1/C_g\)) can be writtem
\(\bar{\epsilon} = \mathcal{C} \bar{\sigma}, \text{ with } \mathcal{C} = \left [C_g + \dfrac{C_v}{\tau(s + \tfrac{1}{\tau})} \right ] \)
where \(\tau = \eta /k_v\).
Show that the creep compliance of the Voigt SLS model of Exercise \(\PageIndex{7}\) is
Exercise \(\PageIndex{9}\)
In cases where the stress rather than the strain is prescribed, the Kelvin model - a series arrangement of Voigt elements - is preferable to the Wiechert model:
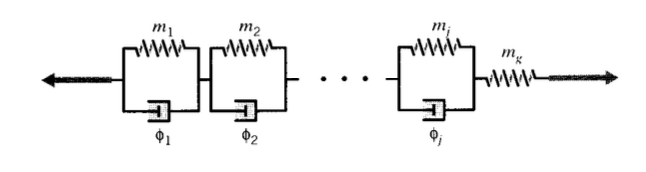
where \(\phi_j = 1/\eta_j = \dot{\epsilon}_j/\sigma_{dj}\) and \(m_j = 1/k_j = \epsilon_j/\sigma_{sj}\) Using the relations \(\epsilon = \epsilon_g + \sum_j \epsilon_j\), \(\sigma = \sigma_{sj} + \sigma_{dj}\), \(\tau_j = m_j /\phi_j\), show the associated viscoelastic constitutive equation to be:
\(\bar{\epsilon} = \left [m_g + \sum_j \dfrac{m_j}{\tau_j (s + \tfrac{1}{\tau_j})} \right ] \bar{\sigma}\)
and for this model show the creep compliance to be:
Exercise \(\PageIndex{10}\)
For a simple Voigt model (\(C_g = 0\) in Exercise \(\PageIndex{7}\)), show that the strain \(\epsilon^{t + \Delta t}\) at time \(t + \Delta t\) can be written in terms of the strain \(\epsilon^t\) at time \(t\) and the stress \(\sigma^t\) acting during the time increment \(\Delta t\) as
Use this algorithm to plot the creep strain arising from a constant stress \(\sigma = 100\) versus \(\log t =(1, 5)\) for \(C_v = 0.05\) and \(\tau = 1000\).
Exercise \(\PageIndex{11}\)
Plot the strain response \(\epsilon (t)\) to a load-unload stress input defined as
\(\sigma (t) = \begin{cases} 0, & t < 1 \\ 1, & 1 < t < 4.5 \\ -1, & 4.5 < t < 5 \\ 0, & t > 5 \end{cases}\)
The material obeys the SLS compliance law (Equation 5.4.30) with \(C_g = 5, C_r = 10\), and \(\tau = 2\).
Using the Maxwell form of the standard linear solid with \(k_e = 10, k_1 = 100\) and \(\eta = 1000\):
a) Plot \(E_{rel} (t)\) and \(E_{crp} (t) = 1/C_{crp} (t)\) versus log time.
b) Plot \([E_{crp}(t) - E_{rel}(t)]\) versus log time.
c) Compare the relaxation time with the retardation time (the time when the argument of the exponential becomes -1, for relaxation and creep respectively). Speculate on why one is shorter than the other.
Show that a Wiechert model with two Maxwell arms (Equation 5.4.34) is equivalent to the second- order ordinary differential equation
\(a_2 \ddot{\sigma} + a_1 \dot{\sigma} + a_0 \sigma = b_2 \ddot{\epsilon} + b_1 \dot{\epsilon} + b_0 \epsilon\)
where
\(a_2 = \tau_1 \tau_2, \ \ \ \ a_1 = \tau_1 + \tau_2, \ \ \ \ a_0 = 1\)
\(b_2 = \tau_1 \tau_2 (k_e + k_1 + k_2), \ \ \ \ b_1 = k_e (\tau_1 + \tau_2) + k_1 \tau_1 + k_2 \tau_2, \ \ \ \ b_0 = k_e\)
For a viscoelastic material defined by the differential constitutive equation:
\(15 \ddot{\sigma} + 8 \dot{\sigma} = \sigma = 105 \ddot{\epsilon} + 34 \dot{\epsilon} + \epsilon\),
write an expression for the relaxation modulus in the Prony-series form (Equation 5.4.36). (Answer: \(E_{rel} = 1 + 2e^{-t/3} + 4e^{-t/5}\))
For the simple Maxwell element, verify that
Exercise \(\PageIndex{16}\)
Evaluate the Boltzman integral
to determine the response of the Standard Linear Solid to sinusoidal straining \((\epsilon (t) = \cos (\omega t))\)
Exercise \(\PageIndex{17}\)
Derive Equation 5.4.48 by using the Arrhenius expression for relaxation time to subtract the log relaxation time at an arbitrary temperature \(T\) from that at a reference temperature \(T_{ref}\).
Using isothermal stress relaxation data at various temperatures, shift factors have been measured for a polyurethane material as shown in the table below:
| \(T, ^{\circ} C\) | \(\log_{10} a_T\) |
| +5 | -0.6 |
| 0 | 0 |
| -5 | 0.8 |
| -10 | 1.45 |
| -15 | 2.30 |
| -20 | 3.50 |
| -25 | 4.45 |
| -30 | 5.20 |
(a) Plot \(\log a_T\) vs. \(1/T (^{\circ} K)\); compute an average activation energy using Eqn 5.4.48. (Answer: \(E^{\dagger} = 222 kJ/mol\).)
(b) Plot \(\log a_T\) vs. \(T(^{\circ} C)\) and compare with WLF equation (Equation 5.4.50), with \(T_g = -35^{\circ} C\). (Note that \(T_{ref} = 0 \ne T_g\).)
After time-temperature shifting, a master relaxation curve at 0\(^{\circ} C\) for the polyurethane of Exercise \(\PageIndex{18}\) gives the following values of \(E_{rel} (t)\) at various times:
| \(\log (t, min)\) | \(E_{rel} (t)\), psi |
| -6 | 56,280 |
| -5 | 22,880 |
| -4 | 4,450 |
| -3 | 957 |
| -2 | 578 |
| -1 | 481 |
| 0 | 480 |
(a) In Equation 5.4.36, choose \(k_e = E_{rel} (t = 0) = 480\).
(b) Choose values of \(\tau_j\) to match the times given in the above table from \(10^{-6}\) to \(10^{-1}\) (a process called "collocation").
(c) Determine appropriate values for the spring stiffnesses \(k_j\) corresponding to each \(\tau_j\) so as to make Equation 5.4.36 match the experimental values of \(E_{rel} (t)\). This can be done by setting up and solving a sequence of linear algebraic equations with the \(k_j\) as unknowns:
Note that the coefficient matrix is essentially triangular, which facilitates manual solution in the event a computer is not available.
(d) Adjust the value of \(k_1\) so that the sum of all the spring stiffnesses equals the glassy modulus \(E_g = 91,100\) psi.
(e) Plot the relaxation modulus predicted by the model from \(\log t = -8\) to 0.
Plot the relaxation (constant strain) values of modulus \(E\) and Poisson’s ratio \(ν\) for the polyisobutylene whose dilatational and shear response is shown in Figure 17. Assume S.L.S. models for both dilatation and shear.
The elastic solution for the stress \(\sigma_x (x,y)\) and vertical deflection \(v(x,y)\) in a cantilevered beam of length \(L\) and moment of inertia \(I\), loaded at the free end with a force \(F\), is
Determine the viscoelastic counterparts of these relations using both the superposition and correspondence methods, assuming S.L.S. behavior for the material compliance (Equation 5.4.30).
A polymer with viscoelastic properties as given in Figure 17 is placed in a rigid circular die and loaded with a pressure \(\sigma_y = 1\) MPa. Plot the transverse stress \(\sigma_x (t)\) and the axial strain \(\epsilon_y (t)\) over \(\log t = -5\) to 1. The elastic solution is